一种自主起降式仿生蝴蝶扑翼飞行器
- 国知局
- 2024-08-01 06:02:51
本申请涉及仿生飞行器,尤其涉及一种自主起降式仿生蝴蝶扑翼飞行器。
背景技术:
1、蝴蝶具有高超的飞行能力。与其他扑翼飞行的动物相比,具有翼展弦比较小,扇翅幅度大以及翼和身体运动高度耦合等特点。现在主流的扑翼飞行器方案有以下几种:(1)曲柄滑块驱动方案:曲柄绕点定轴转动,通过连杆实现滑块在中心轴方向作往复滑动。由于连杆与滑块连接,当滑块在上下往复运动过程中带动连杆实现扑翼运动。该机构由回转副和移动副链接而成;(2)凸轮缓冲弹簧驱动方案:一个盘形凸轮绕点定轴转动,推动下面顶板与缓冲弹簧连接上下往复移动,两边的摇杆铰接于顶板两端,在顶板的带动下即可实现连杆的上下扑动;(3)双曲柄双摇杆驱动方案:该机构完全对称,电机驱动左右两个曲柄分别绕两定点作相反的转动。曲柄绕点作定轴转动,通过下连杆带动上连杆实现上下扑动。
2、传统的仿生蝴蝶扑翼飞行器通常需要通过手抛的方式赋予飞行器一定的初始空速和仰角,使飞行器具备起飞的升力,然而,若抛出的角度不对,容易导致飞行器因升力不够而难以起飞,从而发生坠毁问题。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种自主起降式仿生蝴蝶扑翼飞行器。
2、为实现上述目的,本申请是通过如下技术方案实现的:
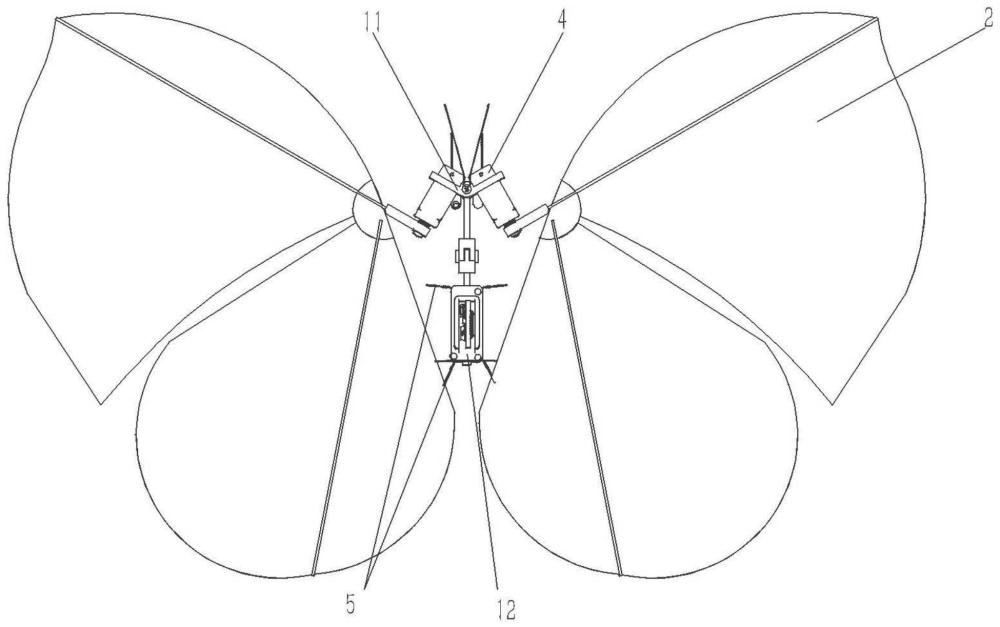
3、一种自主起降式仿生蝴蝶扑翼飞行器,包括前端机架、后端机架、位于前端机架两侧的一对机翼,以及固定在后端机架上的电池,所述的自主起降式仿生蝴蝶扑翼飞行器还包括:
4、与机翼连接的舵机,用于通过转动以调节机翼的扑动幅度;
5、设置于前端机架和后端机架的底部的弹性腿部机构,用于在机翼向下扑动时收缩以产生弹性势能,在机翼向上扑动时扩张以释放弹性势能。
6、可选地,舵机包括固定在前端机架两侧的左舵机和右舵机;
7、左舵机的输出轴与第一牵引杆的一端连接;
8、右舵机的输出轴与第二牵引杆的一端连接。
9、可选地,机翼包括前翅、与前翅连接的后翅;
10、位于前端机架左侧的前翅与第一牵引杆的另一端连接;
11、位于前端机架右侧的前翅与第二牵引杆的另一端连接。
12、可选地,弹性腿部机构包括弧形杆和倒钩;
13、弧形杆的上端卷绕在前端机架和后端机架的底部,弧形杆的下端连接倒钩,弧形杆的中部卷绕形成缓冲弹簧,弧形杆的尾部设置有倒刺。
14、可选地,自主起降式仿生蝴蝶扑翼飞行器还包括腹部关节机构;
15、腹部关节机构包括第一连接件、第二连接件和从动架;
16、第一连接件的前端固定于前端机架的中部,第一连接件的后端通过销轴与第二连接件的前端铰接,第二连接件的后端穿过后端机架与从动架的中部铰接,从动架的两端分别与一对后翅通过柔性活动铰链铰接。
17、可选地,自主起降式仿生蝴蝶扑翼飞行器还包括地面终端,以及固定于后端机架、且位于电池上方的飞控装置;
18、飞控装置包括摄像头、左舵机驱动模块、右舵机驱动模块、mpu6050模块和通信模块;
19、摄像头,用于获取飞行器的飞行姿态图像数据;
20、左舵机驱动模块,用于控制左舵机的输出轴转角;
21、右舵机驱动模块,用于控制右舵机的输出轴转角;
22、mpu6050模块,用于检测飞行器的加速度和角速度,并计算出飞行器的方向和角度;
23、通信模块,用于将所述飞行姿态图像数据传输至地面终端。
24、可选地,飞控装置还包括接收机模块和稳压模块;
25、接收机模块,用于接收所述地面终端发送的遥控信号,并将该信号发送至左舵机驱动模块和右舵机驱动模块;
26、稳压模块,用于使输入电压、输出电压保持稳定。
27、可选地,自主起降式仿生蝴蝶扑翼飞行器还包括设置于前端机架的缓冲触角,缓冲触角的前端卷绕形成缓冲环。
28、可选地,弧形杆和缓冲触角均由弹簧钢制成。
29、可选地,所述地面终端为遥控器。
30、本申请的有益效果:本申请通过设置弹性腿部机构,使其在机翼向下扑动时收缩以产生弹性势能,在机翼向上扑动时扩张以释放弹性势能,该弹性势能与机翼产生的升力共同作用于飞行器本体,使得飞行器完成类似蝴蝶起跳式的自主起飞,从而避免了手抛式起飞,若抛出角度不对,导致飞行器因升力不够而难以起飞并发生坠毁的问题。
31、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:1.一种自主起降式仿生蝴蝶扑翼飞行器,包括前端机架(11)、后端机架(12)、位于前端机架(11)两侧的一对机翼(2),以及固定在后端机架(12)上的电池(3),其特征在于,所述的自主起降式仿生蝴蝶扑翼飞行器还包括:
2.如权利要求1所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,舵机(4)包括固定在前端机架(11)两侧的左舵机(41)和右舵机(42);
3.如权利要求1所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,机翼(2)包括前翅(21)、与前翅(21)连接的后翅(22);
4.如权利要求1所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,弹性腿部机构(5)包括弧形杆(51)和倒钩(52);
5.如权利要求1所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,自主起降式仿生蝴蝶扑翼飞行器还包括腹部关节机构(6);
6.如权利要求1所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,自主起降式仿生蝴蝶扑翼飞行器还包括地面终端,以及固定于后端机架(12)、且位于电池(3)上方的飞控装置(7);
7.如权利要求6所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,飞控装置(7)还包括接收机模块和稳压模块;
8.如权利要求1所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,自主起降式仿生蝴蝶扑翼飞行器还包括设置于前端机架(11)的缓冲触角(8),缓冲触角(8)的前端卷绕形成缓冲环(81)。
9.如权利要求4或8所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,弧形杆(51)和缓冲触角(8)均由弹簧钢制成。
10.如权利要求6所述的自主起降式仿生蝴蝶扑翼飞行器,其特征在于,所述地面终端为遥控器。
技术总结本申请是关于一种自主起降式仿生蝴蝶扑翼飞行器。该自主起降式仿生蝴蝶扑翼飞行器包括前端机架、后端机架、位于前端机架两侧的一对机翼,以及固定在后端机架上的电池,还包括与机翼连接的舵机,设置于前端机架和后端机架的底部的弹性腿部机构,用于在机翼向下扑动时收缩以产生弹性势能,在机翼向上扑动时扩张以释放弹性势能。本申请通过设置弹性腿部机构,使其在机翼向下扑动时收缩以产生弹性势能,在机翼向上扑动时扩张以释放弹性势能,该弹性势能与机翼产生的升力共同作用于飞行器本体,使得飞行器完成类似蝴蝶起跳式的自主起飞,从而避免了手抛式起飞,若抛出角度不对,导致飞行器因升力不够而难以起飞并发生坠毁的问题。技术研发人员:孙军锋,李铖,陈闽泽,李相悦,危翊暄,王春杰,李楚豪,许世杰,柳永强,孟凡钰,盛祥喆受保护的技术使用者:昆明理工大学技术研发日:技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/222577.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表