航天器的磁控制的制作方法
- 国知局
- 2024-08-01 06:08:13
本发明涉及航天器诸如卫星,以及用于对卫星进行控制的方法和设备。
背景技术:
1、具有精确稳定性和指向要求的卫星历来需要复杂的制导和控制系统,该制导和控制系统主要依赖于反作用轮、控制力矩陀螺仪或推进器。基于反作用(或动量)轮(“rw”)和控制力矩陀螺仪(“cmg”)的控制系统具有旋转质量(即,飞轮),并且依靠角动量守恒来对卫星的指向重新定向。分别在rw或cmg内对飞轮加速或重新定向会改变rw或cmg的角动量。角动量上的变化会在航天器中产生旋转,旋转运动从而抵消rw或cmg产生的角动量的变化。通过在每个轴上致动rw/cmg,实现三轴控制。更大和更快的轮可以储存更多动量,从而实现更高的精度和旋转速度。
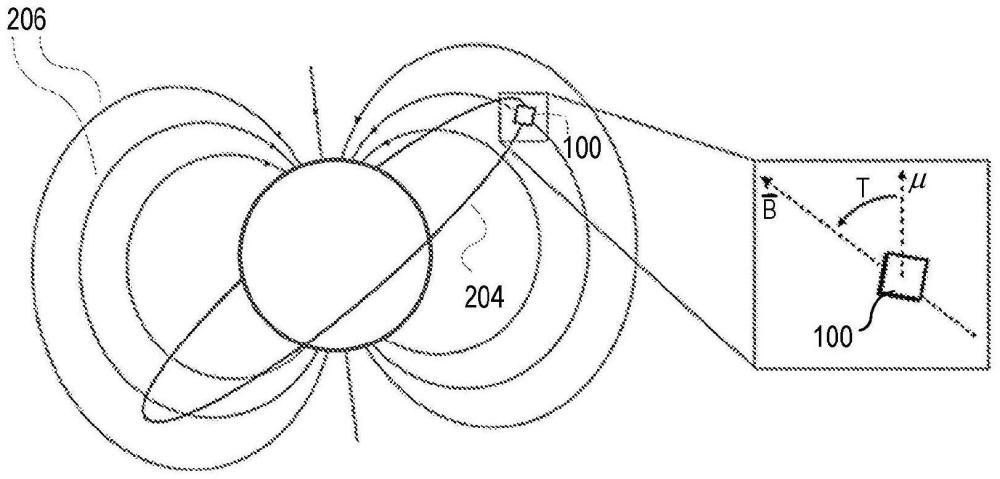
2、增强这些基于飞轮的致动器的通常是某种形式的磁控制,该某种形式的磁控制依赖于地球磁场向卫星粗略地施加力以支持主要系统。磁致动器——所谓的“磁力矩器”——由可以随意致动或调制的电磁铁构成,产生试图与地球的自然磁场对准的可控的本地磁场,产生扭矩以引起本体旋转。磁力矩器尚未用于需要精确控制的通信或光学卫星中的主要指向方法。相反,它们用于次要目的,或者它们仅在需要非常粗略的指向或脱钩时使用,该次要目的诸如为尖端脱钩(tip-off detumbling)(不需要精确的最终方向)或反作用轮脱饱和(将rw的过量动量卸载到地球磁场中)。
3、尽管反作用轮和控制力矩陀螺仪是有效的,但它们却是卫星元件中最容易发生故障的元件中的一者。它们是复杂的机电系统;其内所包含的盘以达约10,000rpm的速度旋转,并且其内所包含的盘必须在太空的真空中保持润滑。它们具有微处理器,这些微处理器容易受到辐射问题的影响,并且它们包括电机,这些电机还具有诸如轴承的运动部件,这些运动部件经常在太空的真空和连续的温度梯度中发生故障。
4、因此,卫星通常包括至少一个额外的反作用轮,用于总共四个反作用轮,以具有一定程度的冗余度。即使在冗余度的情况下,各个致动器的不可避免的故障最终也会降低控制权,从而导致卫星失控。通常用于具有可以致力于压缩气体存储的容量的大型系统的推进器具有寿命受存储气体的消耗率限制的系统。因此,推进器不适合长时间的连续制导控制使用。
5、简而言之,反作用轮具有卫星上所有部件中故障率最高的部件,它们增加了卫星的质量并且消耗了能量,而且增加了成本。因此,该技术将受益于制导和控制方面的改进。
技术实现思路
1、本发明的实施方式提供了一种提高卫星指向准确度的方法,该方法避免了现有技术的一些成本和缺点。根据本发明的一些实施方式,仅使用磁力来准确地指向卫星。
2、卫星的纯磁性控制的优点是它不需要使部件运动。与上面所讨论的方法相比,它将具有更高的可靠性、更轻的质量以及更低的成本。这解除了对卫星形状因素的限制,从而可以针对任务细节进行优化设计,而不是容置笨重的反作用轮。
3、在一些实施方式中,本发明提供了一种仅使用磁力来对第一卫星进行控制的方法,该方法包括:(a)使用磁力测定对第一卫星在当前时间和当前位置的当前姿态进行评估;(b)对第一卫星在未来时间未来位置处的期望的姿态进行设定;(c)为第一卫星开发成组的航路点,其中,航路点提供第一卫星在当前位置与未来位置之间的多个位置的姿态,其中,航路点是基于地球磁场的模型,其中,模型提供每个航路点处的磁场状态;以及(d)对多个磁力矩器进行致动以引起扭矩,扭矩使第一卫星在各个航路点之间的姿态之间的差异实现尽可能小;以及在未来位置处实现所期望的姿态,并且其中,磁力矩器是引起第一卫星旋转以实现所期望的姿态的唯一装置。
4、在一些另外的实施方式中,本发明提供了一种包括用于卫星的控制系统的设备,其中,该控制系统仅使用磁力来对卫星的姿态进行控制,其中,该控制系统包括:致动器,该致动器对多个磁力矩器进行致动;存储器,该存储器对三轴磁力计数据和基于该三轴磁力计数据的数据进行存储;处理器,其中,该处理器:(a)为卫星开发成组的航路点,其中,航路点提供卫星在当前时间当前位置与未来时间未来位置之间的多个位置处的姿态,其中,航路点是基于地球磁场的模型和使用多个磁力矩器来获得多个位置中的每个位置处的姿态的能力的;以及(b)发送信号,该信号使致动器对多个磁力矩器进行致动,以在从当前时间开始并在获得所期望的姿态的未来时间结束的时间段期间引起扭矩,其中,磁力矩器是引起卫星旋转以获得所期望的姿态的唯一装置。
技术特征:1.一种用于仅使用磁力来对第一卫星进行控制的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,开发成组的航路点包括:
3.根据权利要求2所述的方法,其中,对所述地球磁场的状态进行计算包括接收从附加卫星获得的数据,所述附加卫星具有与所述第一卫星相同的轨道平面并且在轨道上相对于所述第一卫星靠前。
4.根据权利要求3所述的方法,其中,所述数据是三轴磁力计数据。
5.根据权利要求4所述的方法,所述方法包括:对于从中获得数据的每个附加卫星,基于所述数据对所述附加卫星中的每一者的当前姿态进行估计,以及对每个所述附加卫星的所估计的当前姿态的协方差进行估计。
6.根据权利要求5所述的方法,所述方法包括:对在所述磁力计数据被收集的时间和位置处的所述磁力计数据与所述地球磁场的模型的偏差进行评估。
7.根据权利要求6所述的方法,所述方法包括:对与所述磁场的模型的偏差进行传播。
8.根据权利要求7所述的方法,所述方法包括:对所传播的偏差与所述第一卫星的近期轨迹的相关性进行评估。
9.根据权利要求8所述的方法,所述方法包括:在考虑所评估的相关性的情况下,在所述第一卫星处将所述磁力计数据结合到所述第一卫星的磁场模型中。
10.一种包括用于卫星的控制系统的设备,其中,所述控制系统仅使用磁力来对所述卫星的姿态进行控制,其中,所述控制系统包括:
11.根据权利要求10所述的设备,其中,所引起的扭矩实现了各个航路点之间的卫星姿态之间的尽可能小的差异。
12.根据权利要求10所述的设备,其中,所述设备是卫星。
13.根据权利要求10所述的设备,其中,所述三轴磁力计数据和基于所述三轴磁力计数据的数据是从所述卫星的轨道平面中的其他卫星接收的。
14.根据权利要求13所述的设备,其中,所述处理器还使用所述三轴磁力计数据和基于所述三轴磁力计数据的数据来对所述航路点所基于的所述地球磁场的模型进行修改。
技术总结一种仅使用磁力来对卫星进行控制的方法,以及用于实施该方法的控制系统。该方法涉及:使用磁力测定对卫星在当前时间和当前位置的当前姿态进行评估;对卫星在未来时间未来位置处的期望的姿态进行设定;开发成组的航路点,该航路点提供卫星在当前位置与未来位置之间的多个位置的姿态;以及对多个磁力矩器进行致动以引起扭矩,扭矩使卫星在各个航路点之间的姿态之间的差异实现尽可能小;以及在未来位置处实现所期望的姿态,磁力矩器是引起卫星旋转以实现所期望的姿态的唯一装置。技术研发人员:格雷戈里·塞恩·怀勒,鲍比·格伦·霍尔登,陈曼薇受保护的技术使用者:野星有限责任公司技术研发日:技术公布日:2024/6/30本文地址:https://www.jishuxx.com/zhuanli/20240722/222801.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表