用于检查航空器或航天器的表面的系统和方法与流程
- 国知局
- 2024-08-01 05:47:57
本发明涉及一种用于检查航空器或航天器的表面的系统和方法。
背景技术:
1、在制造机身结构,例如航空器或航天器的机身结构时,致力于高的表面质量。如果机身例如具有铆钉连接,则常见的是视觉地和/或触觉地检查铆钉连接的质量并且借助测量工具逐点测量。为此,从侧面照亮各个铆钉连接并且借助阴影图像检查铆钉是否例如过深或过高地位于铆钉孔中或以其他方式是显眼的。还常见的是,用手指经过铆钉头和/或使用测量表,以便识别突出的或过深的边缘。
2、此外,已知用于表面扫描的设备,其使用光投影和图像检测技术,以便针对特定特征对表面部段进行探查。这些设备通常保持在手中并且具有泡沫材料框架,所述泡沫材料框架置于要检查的表面部段上,随后进行对由泡沫材料框架围住的区域的光学检测。如果确定具有形状偏差的点,则关于此的信息被保存。这尤其以图像信息的形式实现,在所述图像信息中相应地标记相应的显眼的点。
3、对于检验在航空器或航天器的机身处的包括上百个或更多铆钉连接的较长的铆钉排而言,这种检验是耗费时间的。此外,也可以对表面结构关于其他异常进行检查,例如关于凹坑或刮痕进行检查。
技术实现思路
1、考虑作为目的是,提出一种尽可能简单的系统和方法,借助所述系统和方法可以尽可能快且可靠地自动化地执行航空器或航天器的表面的检验,其中保护航空器或航天器和其周围的装配环境的整体免受损坏。
2、所述目的通过根据本发明的用于检查航空器或航天器的表面结构的系统实现。有利的实施方式和改进方案在本文中得出。
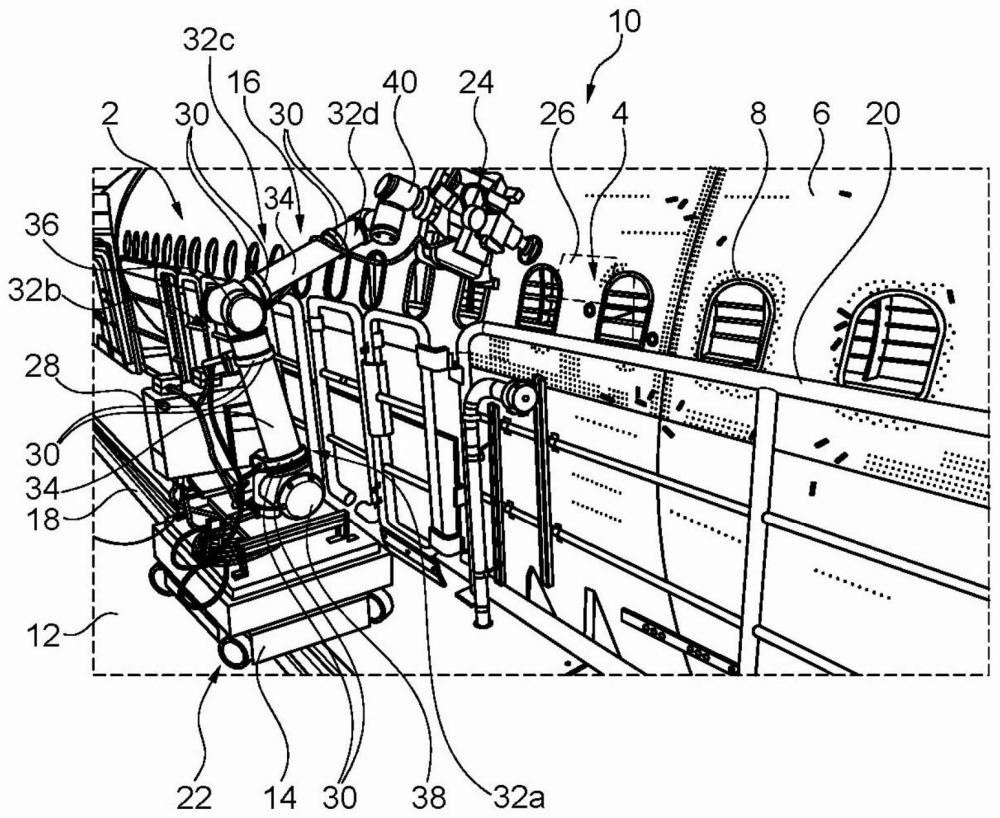
3、提出一种用于检查航空器或航天器的表面结构的系统,其具有:带有驱动器的地面行驶工具;设置在地面行驶工具上的机械手,所述机械手具有多个彼此铰接地设置的运动元件;设置在机械手上且可通过机械手运动的检验设备;多个接近传感器;和控制单元,其中接近传感器至少分布在机械手处并且在那划分为多个区并且构成用于检测接近传感器与在相应的检测区域中的对象的间距,其中驱动器和接近传感器与控制单元耦联,其中检验设备配置用于确定表面结构的特性并且通过与期望特性的比较来识别具有形状偏差的点,其中系统构成用于通过检验设备沿着表面结构的连续运动来连续地检验航空器或航天器的表面结构,并且其中控制单元构成用于记录由接近传感器检测到的间距,并且在考虑检测到的间距的条件下操控驱动器和机械手,使得检验设备以距表面结构预定的间距依次安置在检验位置处并且同时保持地面行驶工具和机械手与表面结构和可能的包围表面结构的对象的足够间距。
4、地面行驶工具设计用于在装配和建造位置处使机械手和设置在其上的检验设备在地面上沿着要检验的表面运动。可设想的是,地面行驶工具停放在另外的空间中并且从该空间行驶至装配或建造位置处。因此,地面行驶工具可以优选构成也用于经过更长的路程,所述路程可以包含要检验的表面的伸展的数倍。地面行驶工具可以尽可能紧凑地并且优选自给自足地构成。地面行驶工具可以例如构成为标准化的、无人驾驶的运输工具(ugv,“unmanned ground vehicle”),所述运输工具可以理解为移动式机器人。这种运输装置在工业环境中是已知的并且尤其用于使托盘或其他对象自动化地沿着地面线或通过其他导航辅助支持地在地面上行驶。驱动器优选是电动的并且地面行驶工具可以具有蓄电器,所述蓄电器可与驱动器和另外的部件连接。
5、机械手可以具有多个运动元件,所述运动元件例如棒状地设计并且铰接地彼此连接。优选地,铰链可主动地旋转,以便可以使运动元件相对于彼此运动。作为在机械手处的端部执行器设有检验设备。机械手具有第一端部,所述第一端部设置在地面行驶工具处。相对置的第二端部具有端部执行器或检验设备。例如,机械手可以具有一个、两个、三个、四个或更多个运动元件,所述运动元件形成运动链并且分别经由铰链与另外的运动元件中的一个运动元件连接,或与地面行驶工具连接。优选的是,运动元件或铰链设计为可彼此独立地运动,其中控制单元与所有促动器连接,以便操控所述促动器并且使检验设备如所期望那样运动或定向。
6、检验设备可以以不同方式实现。优选地,检验设备,如开头所阐述,实施为光学扫描设备,以便无接触地检查特定特征,其方式为,所述扫描设备记录和评估由可见光构成的投影图案的图像。这种检验设备是已知的并且通常用于检验飞行器表面结构。然而,可设想的还有基于不可见光的扫描设备或机械扫描设备。
7、接近传感器构成用于优选无接触地检测与对象的间距。这种接近传感器例如可以实现为超声传感器,所述超声传感器发射超声信号并且接收反射。对于金属对象还可以使用电感式接近传感器。电容式接近传感器或光学传感器同样是可考虑的,其中光学传感器分别具有构造决定的检测区域和检测方向。
8、本发明的核心在于,可实现检验设备在建造或装配位置处的改进的运动控制从而更快的运动。在地面行驶工具和/或机械手行驶靠近对象时,不仅通过识别相关对象的接近传感器产生停止信号。替代地,控制各个运动元件和地面行驶工具的运动的整体,使得在接近对象时也可实现检验设备的继续运动,其方式为,地面行驶工具和机械手的各个部件的各自的间距保持在预设的(最小)值并且仅根据需要限制各个部件的可运动性或速度。通过划分为区,可以各自地观察机械手的和地面行驶工具的多个区域,以便规划运动的局部限制。因此可实现智能的、前瞻性的运动控制,所述运动控制在之前未知障碍的情况下可实现驶向检验位置的迅速的顺序并且加速表面结构的检查。所述系统可以在制造期间、在维护时和在进行的运行中,例如在两次相继的飞行之间使用。
9、在一个有利的实施方式中,控制单元构成用于使机械手的与其他元件相比更靠近对象或表面结构的那些元件与其他元件相比以更低的速度运动。因此,执行地面行驶工具和机械手的适配的运动,以便执行检查表面结构的无摩擦的过程。据此,在障碍或其他对象处运动经过以如下方式进行,使在地面行驶工具或机械手处的具有最高碰撞概率的区域,即具有距障碍或其他对象最近的间距的区域,最慢地运动。可以通过控制单元进行操控,使得地面行驶工具或机械手的运动过程规划为,使得防止进一步接近对象或障碍。
10、在一个有利的实施方式中,所述区包括端部执行器区,所述端部执行器区邻接于检验设备或在所述端部执行器区的区域中设置检验设备,其中控制单元构成用于由在端部执行器区中的接近传感器的检测到的距离辅助检验设备在检验位置中的一个检验位置处的安置。检测到的部分数量的间距用于执行将检验设备精确地定位在要检查的表面结构处。不需要仅设计用于将检验设备定位在表面结构处的专用的接近传感器。然而也可行的是,对此附加地,检验设备本身也可以配设有间距传感器,所述间距传感器允许将检验设备定位在表面结构处。端部执行器区可以在铰链处或邻接于铰链地存在,在所述铰链处设置检验设备。可设想的是,在端部执行器区中设置的接近传感器的检测区域至少部分地匹配于检验设备的定向。
11、在一个有利的实施方式中,控制单元构成用于规划检验设备的用于达到检验位置的运动路径,其中将接近传感器的检测到的间距不同地加权。规划的运动路径尤其可以与较小的检测到的间距关联,例如通过较大的加权关联。因此,可以辅助系统的所有部件保持与障碍或其他对象的最小间距。
12、在一个有利的实施方式中,控制单元构成用于利用至少一个用于机器学习的模型,以便规划用于地面行驶工具和/或机械手的运动路径,其中运动路径至少部分地基于值函数推导,所述值函数包括检测到的间距并且由此描述在地面行驶工具或机械手和表面结构和其他对象之间的碰撞概率,并且其中运动路径包括地面行驶工具和/或机械手的运动过程的顺序。运动过程的顺序尤其可以涉及机械手的或地面行驶工具的驱动器的所有促动器的所有子运动的整体,其用于将检验设备安置在检验位置处。机器学习可实现使系统、建造或装配位置通过重复地检查航空器或航天器的表面结构来学习环境的特性并且适配性地将地面行驶工具和机械手的运动与其匹配。因此,系统的效率可以连续地提升并且提高检查的可能的速度。控制单元可以将检测到的间距馈入机器学习算法中,以便分析所述间距。因为用于机器学习的算法是有关机率理论的性质,所以控制单元可以由检测到的间距确定统计学特征并且由至少一个统计学特征计算至少一个状态指标,所述状态指标于是用于评估不同的不期望的状态的概率,即与待检查的表面、装配或建造位置的布置、系统本身、其他相同类型的系统(如果使用多个系统的话)、人等的碰撞,在训练期间用于机器学习的算法显示出所述概率。不期望的状态的识别于是可以理解为超过之前确定的极限概率。
13、在一个有利的设计方案中,控制单元构成用于顺序地操控接近传感器,以避免相互的影响。这例如可以涉及顺序地操控接近传感器,所述接近传感器的检测区域部分地重叠。通过避免相互的影响,明显地提高检测间距的准确性。如果例如在机械手的运动元件处分布有多个接近传感器,所述接近传感器具有径向向外指向的且展开横向于所涉及的运动元件的平面的检测区域,则有意义的可以是,替代相邻的接近传感器,总是仅同时操控彼此相对置的接近传感器。
14、在一个有利的实施方式中,机械手是机器人臂,所述机器人臂经由基座铰链与地面行驶工具连接,其中运动元件是细长的臂元件,并且其中机械手包括端部执行器铰链,在所述端部执行器铰链处设置检验设备。基座铰链和/或端部执行器铰链可分别至少围绕两条轴线旋转并且允许检验设备的高的可移动性,以便将检验设备根据地面行驶工具的位置安置在期望的检验位置处并且同时以期望的方式定向。
15、在一个有利的实施方式中,机械手包括由电连接导线构成的网络,所述网络至少局部地在机械手的表面处伸展,其中接近传感器设置在机械手的表面处并且可与网络连接。接近传感器由此可以容易地被替换、移除或改装。根据机械手的类型和实施方案可以提出,进行特定的改型,以便可实现改进的运动规划。网络可以在机械手的主要部分的部分上延伸并且允许非常灵活地为机械手装配接近传感器。
16、在一个有利的实施方式中,连接导线构成用于提供用于接近传感器的供电电压,其中接近传感器构成用于与控制单元无线地通信。因此,网络可以非常简单地设计并且仅限制为将两个电压极分布到表面上。各个接近传感器仅可以粘接到机械手的表面上,以便在那用电压供电。
17、在一个有利的实施方式中,系统构成用于借助于可去除的标记来标记具有形状偏差的识别到的点。标记可以具有可去除的颜色,借助颜色圈出形状偏差。必要时印有条形码或二维码并且允许提供另外的信息的可粘标签可以粘接在形状偏差处或形状偏差旁。rfid标签的安放同样是可考虑的。
18、系统优选构成用于生成数据,所述数据代表要扫描的表面和/或至少表面结构的查出的异常。系统为此能精确地确定相应的异常的位置,例如通过安装在装配或建造位置处的定位系统,所述定位系统可实现位置确定,例如通过在地面或表面结构处的标记网格、激光系统等。
19、本发明还涉及一种用于检查航空器或航天器的表面结构的方法,所述方法具有以下步骤:提供至少一个地面行驶工具,所述地面行驶工具具有驱动器、设置在地面行驶工具上的具有多个彼此铰接地设置的运动元件的机械手、设置在机械手处的且能通过机械手运动的检验设备和多个接近传感器,所述接近传感器至少分布在机械手处并且在那划分为多个区并且构成用于检测接近传感器与在相应的检测区域中的对象的间距;以及通过借助控制单元的操控使检验设备连续地运动;以及通过确定表面结构的特性并且与期望特性比较来识别具有形状偏差的点,其中操控包括记录由接近传感器检测到的间距并且在考虑检测到的间距的条件下控制驱动器和机械手,使得检验设备以距表面结构预定的间距依次安置在检验位置处并且同时保持地面行驶工具和机械手与表面结构和可能的包围表面结构的对象的足够间距。
20、在一个有利的实施方式中,控制单元操控机械手的靠近对象或表面结构放置的那些元件,使得所述元件与其他元件相比,以更低的速度运动。
21、在一个有利的实施方式中,控制单元规划检验设备的用于达到检验位置的运动路径,其中将接近传感器的检测到的间距不同地加权。
22、在一个有利的实施方式中,控制单元利用至少一个用于机器学习的模型,以便规划用于地面行驶工具和/或机械手的运动路径,其中运动路径至少部分地基于值函数推导,所述值函数包括检测到的间距并且由此描述碰撞概率,并且其中运动路径包括地面行驶工具和/或机械手的运动过程的顺序。
23、根据本发明的系统和根据本发明的方法原则上构成用于在多个部段处同时检查表面结构。为此,使用多个系统,即多个地面行驶工具,其具有设置在其上的机械手和检验设备。相应的控制单元通过多个接近传感器也能防止一个系统与另一个系统的碰撞。
24、原则上可考虑的是,多个系统的控制单元可彼此耦联,以便将各个地面行驶工具和机械手的位置相互传送,以便前瞻性地防止碰撞。
25、同时可考虑的是,所述系统中的一个系统的检测到的间距借助相关的、检测间距的系统的相应的位置说明也传输至其他系统的控制单元,使得可实现运动过程的前瞻性的规划。
26、因此,在方法的一个有利的实施方式中,多个地面行驶工具连同设置在其上的机械手和检验设备或至少一个地面行驶工具和至少一个另外的承载机械手和检验设备且具有控制单元的设备共同地检查表面结构的多个部段,其中控制单元可彼此耦联,以便传达相应的地面行驶工具或其他设备和/或相应的机械手和/或相应的检验设备的位置说明,和/或以便传达具有相应的地面行驶工具的或其他设备的和/或相应的机械手的和/或相应的检验设备的位置说明的分别检测到的间距。“其他设备”同样可以理解为行驶工具,所述行驶工具不强制性地与地面连接并且例如可在绳索、设置在地面之上的轨道或经由悬浮机构沿着表面结构运动。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221485.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表