一种应用于海岛的海上小型无人机自维持补给平台及运行方法
- 国知局
- 2024-08-01 05:45:37
本发明涉及应用于海岛的海上小型无人机自维持补给平台,属于新能源自动化无人机智能机库领域。
背景技术:
1、当前各国都在积极发展无人机技术,无人机作为能把智能化、自动化、无人化三者完美结合的武器装备,将迎来更加广泛的应用。同时应用无人机的能源供应设施、通讯导航设施、维护检测设施等基础设施缺乏的问题亟需解决。
2、近几年,针对无人机智能机库问题提出了不少的解决方法。专利cn206829740u与cn107060447a介绍了利用日常供电系统供电、兼有备用供电系统的无人机智能机库,但便携性差,在我国基础设施相对落后的海洋岛礁无法使用。专利cn116692070a介绍了带有自动归中装置的机库,同样缺乏便携性,同时对基础设施有较高的要求不适应岛礁的恶劣环境。而专利cn107905603a介绍了带有保护罩空腔的无人机库,解决了应对恶劣环境的问题,但原本使用外接充电式能源供给,依旧无法解决长期的能源供应问题,难以适应岛礁基础设施建设。
3、针对海洋岛礁缺乏可靠的无人机补给平台的现状,本专利提出了一种应用于海岛的海上小型无人机自维持补给平台。产品便携性强、隐藏性强,使用波浪能自发电作为能源、自带蓄电系统,搭载信息化管理系统;对海洋岛礁环境基础设施要求低、可设置范围广,可以实现从无人机自识别空闲机库、无线充电、满电自动放飞无人机等功能,同时检修周期长;可为我国海洋防线建设提供一定无人机技术理论支持。
技术实现思路
1、本发明提供了一种应用于海岛的海上小型无人机自维持补给平台,系统由能源收集与储存模块、补给平台模块、无线充电模块三部分组成;
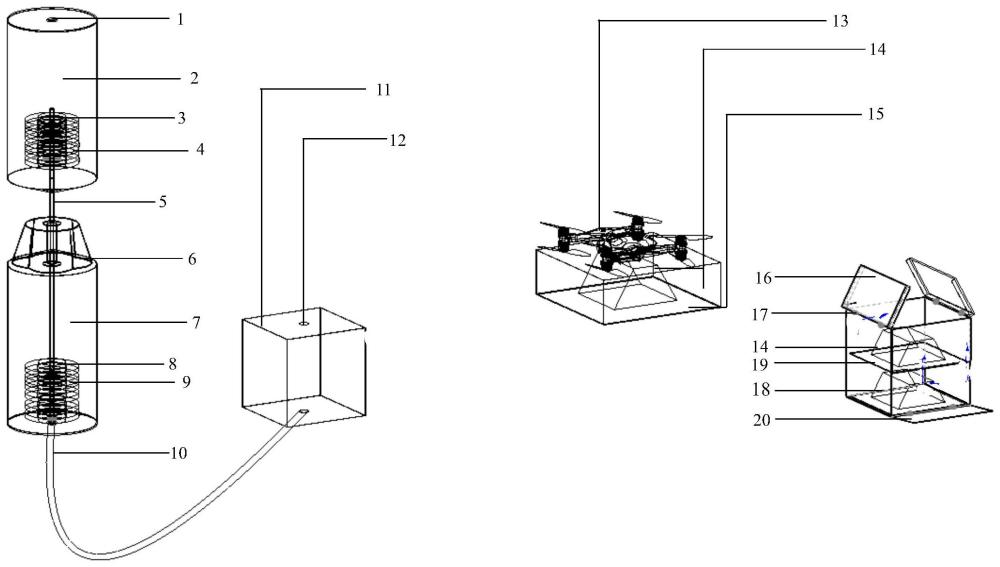
2、其中能源收集与储存模块由缓冲垫1、第一圆筒式发电机2、第一动子组3、第一定子组4、主轴5、浮标6、第二圆筒式发电机7、第二动子组8、第二定子组9、电线10、能源储存装置11、电源输出接口12、主轴第一缓冲垫21、主轴挡片22、润滑油23、主轴第二缓冲垫24等组成;该系统中缓冲垫1置于第一圆筒式发电机2顶部与主轴第一缓冲垫21接触处,第一动子组3在主轴5一端固定,且10个单独动子间距相同,第一定子组4共有10个单独的定子,使10个定子等间距地固定在第一圆筒式发电机2的内部,确保第一动子组3外径小于与第一定子组4的内径,主轴5贯通第一圆筒式发电机2与第二圆筒式发电机7,主轴5中间部分与浮标6相连,通过主轴挡片22对浮标6进行固定,浮标6中心部分与主轴5接触壁间含有润滑油23,第二圆筒式发电机7通过主轴5与第一圆筒式发电机2相连,第二动子组8在主轴5另一端固定,同样确保10个单独动子间距相同,第二定子组9共有10个单独的定子,使10个定子等间距的固定在第二圆筒式发电机7的内部上,同样确保第二动子8外径小于与第二定子组9的内径,能源储存装置11上端装有电源输出接口12,第一圆筒式发电机2固定在第二圆筒式发电机7上方,且上下间距固定不变,第一圆筒式发电机2和第二圆筒式发电机7的整体固定在海岛周围的海床上,第二圆筒式发电机7下部与放在海岛上的能源储存装置11通过电线10进行软连接。
3、其中补给平台模块由无人机13、第一充电模块14、检测装置15、机库舱盖16、第一电动合页17、第二充电模块18、第一停机坪19、机库侧盖20、第二停机坪27、第二电动合页30、机库32组成;该系统中机库舱盖16通过电动合页17连接在机库上,第一充电模块14置于第一停机坪19上,无人机13停靠在第一充电模块14上,检测装置15固定在机库32内壁四周,第二充电模块18位于机库32底部第二停机坪27上,机库侧盖20通过第二电动合页30连接在底部,由上方打开进行作业。
4、其中无线充电模块由第一归中装置25、第一视觉识别标签26、第二归中装置28、第二视觉识别标签31组成;该系统中第一归中装置25与第一视觉识别标签26集成在第一充电模块14上,第一充电模块14下方与第一停机坪19相连,使第一充电模块14处于停机坪中心,第二归中装置28与第二视觉识别装置31集成在第二充电模块18上,同样使第二充电模块18处于第二停机坪27的中心,第一停机坪19与第二停机坪27之间存在高度差,以满足无人机13入舱需求。
5、浮标6的材质为玻璃钢;第一圆筒式发电机2与第二圆筒式发电机7外壳材质为耐海水腐蚀钢,外涂聚氨酯防腐涂料;第一圆筒式发电机2、第二圆筒式发电机7与主轴连接处用“o”型橡胶圈进行密封;第一圆筒式发电机2、第二圆筒式发电机7内部第一定子组4、第二定子组9为励磁绕组,由导线绕制而成;第一圆筒式发电机2、第二圆筒式发电机7内部第一动子组3、第二动子组8材质均为钦铁硼,10个动子之间用非导磁材料隔开。
6、第一充电模块14、第二充电模块18,两无人机13的充电模块中均为矩形耦合线圈.耦合实验采用的具体参数为线圈长度160mm、线圈匝数为8匝、线圈材料为横截面积为3平方毫米的500股利兹线、系统传输频率为60khz;无人机13充电部位上安装了轻量型耦合线圈,可以配合第一充电模块14、第二充电模块18进行高效充电。
7、第一充电模块14与第一停机坪19相连,并以焊接方式固定于箱体,第二充电模块18与第二停机坪27相连以滑轨固定于箱体的机库侧盖20,机库32通过智能系统控制机库舱盖16与机库侧盖20的开合;所述的补给平台模块可智能探测所适配无人机13靠近,实现自动开合机库舱盖16、机库侧盖20与第二停机坪27滑出;所述的补给平台模块可根据机库内无人机13存放情况和存电量,智能引导无人机13分别降落于第一停机坪19或第二停机坪27。
8、无人机13自身集成的接收器由一个或多个线圈组成,与发射器的线圈相互感应。
9、当无人机13未进行任务且进入战备状态时,无人机13的机库舱盖16与机库侧盖20为关闭状态,以防杂物进入影响无人机13充电补给,能源储存装置11将电能储存在电池中,暂不进行升压操作;同时,信息网络控制中心将时刻准备接受指令进行任务行动,机库的自动化装置待命,收到任务指令后将迅速打开机库舱盖16与机库侧盖20让无人机13起飞。
10、当无人机13进行巡航时,平台信息控制中心将充当信息中转站,利用卫星加密向控制中心转发无人机13所探测到的信息;此外,平台自动化设备将对充电平台进行自检并向控制中心反馈自检结果,无人机13将组成集群配合完成任务,同时进行相关海域的事态感知与环境检测。
11、当无人机13结束任务返回补给时,平台会向每台无人机13自动匹配最适合的机库,补给平台的顶部设计有机库舱盖16,可以自动感应无人机13的接近,当无人机13接近补给平台时,感应顶盖会检测到无人机13的信号,并触发操作,机库舱盖16与机库侧盖20将会迅速打开,第一充电模块14、第二充电模块18处集成了第一归中装置25、第二归中装置28,用于引导无人机13准确停靠在补给平台上,第一归中装置25、第二归中装置28可以通过使用视觉标记、红外线或其他定位技术,帮助无人机13对准并停靠在正确的位置,无人机13降落在第一充电模块14、第二充电模块18上后,将自动关闭机库舱盖16与机库侧盖20;随后检测装置将对无人机13进行检测,第一充电模块14、第二充电模块18上分别设置有第一视觉识别标签26、第二视觉识别标签31供无人机13进行识别和定位,这些标签可以是二维码、条形码、标识符或其他形式的视觉标记,以便无人机13能够准确识别补给平台的身份,确认无误后平台会监测无人机13的电池的状态。
12、根据电池的需求和充电状态,能源储存装置11将自动调整充电电流对无人机13进行充电,确保无人机13高效安全地进行能源补给,第一充电模块14、第二充电模块18各自包含一个电磁场发射器,电磁发射场产生电磁场来传输能量,无人机13上配备有电磁场接收器,用于接收发射器产生的电磁场能量。
13、本平台供电方式是由海洋波浪能进行发电;本平台结合了海洋能源发电系统和无人机的补给平台,是无人一体化平台;基于岛礁附近海域具备的稳定波浪能资源,第一圆筒式发电机2、第二圆筒式发电机7通过一根主轴5连接,可实现占用较小的空间增大发电量,提高隐蔽性。
14、能源储存装置11在海域能流密度较大时,储存多余能量,当能流密度较小,发电量不足以供给平台使用时,能源储存装置会释放储存的电能确保平台正常运行。
15、能源储存装置11内部集成电源管理系统,根据不同用电需求进行分配,通过检测每台无人机13剩余电量不同调整每台无人机13的充电功率,确保每台无人机13都能及时进行集群作战。
本文地址:https://www.jishuxx.com/zhuanli/20240722/221262.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表