用于堤坝溃口探测的两栖无人机系统的制作方法
- 国知局
- 2024-08-01 05:46:17
本发明属于水利设施维护,具体涉及一种用于堤坝溃口探测的两栖无人机系统。
背景技术:
1、在堤坝溃口发生时,及时发现并采取有效措施进行抢险是至关重要的。然而,现有的堤坝溃口探测方法大多依赖于人工巡查和监测设备,存在一定的局限性。特别是在夜晚或恶劣天气条件下,人工巡查的难度和危险性加大,而监测设备的精度和可靠性也受到一定的影响。因此,研发一种用于堤坝溃口探测的两栖无人机系统,具有很高的实用价值和现实意义。
技术实现思路
1、本发明为了解决现有技术存在的不足,提供一种安全可靠性强、探测数据全面且精度高的用于堤坝溃口探测的两栖无人机系统。
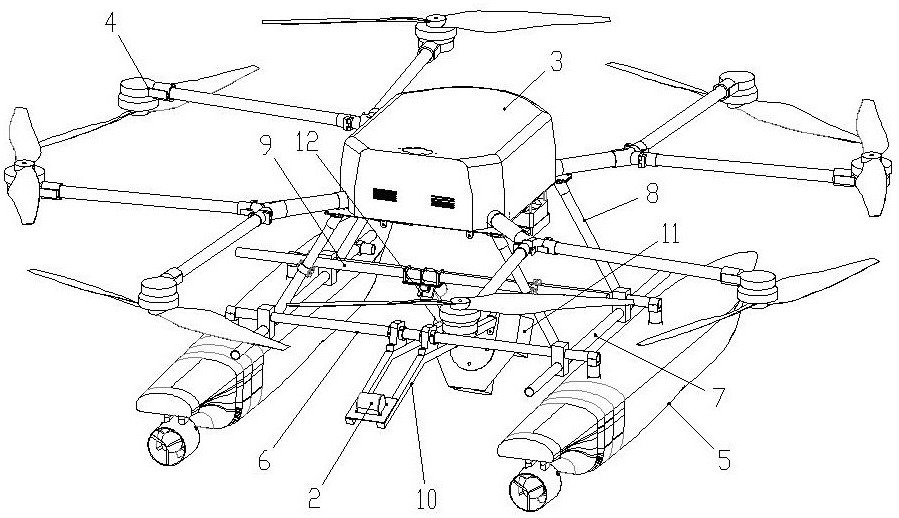
2、为解决上述技术问题,本发明采用如下技术方案:用于堤坝溃口探测的两栖无人机系统,包括无人机本体以及设置于无人机本体下方的摆动平台,摆动平台上安装有多波束测深仪、声学多普勒流速剖面仪以及摄像装置;无人机本体包括飞行单元和航行单元,飞行单元包括壳体以及沿壳体四周均匀设置的若干个飞行动力装置,航行单元通过支撑架设置于壳体的下测,摆动平台设置在支撑架上。
3、优选地,航行单元包括两个左右对称设置的浮艇,支撑架包括沿左右方向设置的两根下横杆,两根下横杆左端分别与左侧浮艇顶部的两个连接件固定连接,两根下横杆右端分别与右侧浮艇顶部的两个连接件固定连接,两根下横杆的左侧之间及右侧之间均通过一根下纵杆连接,左侧的下纵杆上和右侧的下纵杆上分别连接有两根倾斜布置的拉杆,四根拉杆上端与壳体底部固定连接。
4、优选地,在前侧的两根拉杆之间固定设有平行于下横杆的上横杆,摆动平台包括垂直并转动连接在下横杆上的两根摆动杆,两根摆动杆的一端设有固定台,多波束测深仪和声学多普勒流速剖面仪设在固定台上,摄像装置设在两根摆动杆的另一端,上横杆连接有用于驱动摆动杆旋转的动力装置,动力装置采用气缸、液压缸或者电缸,动力装置的动力输出端通过连杆与两根摆动杆连接。
5、优选地,摆动杆在上横杆处向下折弯形成钝角结构。
6、采用上述技术方案,本发明的用于堤坝溃口探测的两栖无人机系统的具体工作过程,包括以下步骤:
7、s1.拍摄获取溃口的第一信息:操控本发明的两栖无人机飞行至堤坝的抗洪面,并操控无人机沿堤坝的宽度方向飞行与信息收集,通过摄像装置拍摄获取第一信息,第一信息包括缺口信息与流道信息;在两栖无人机飞行过程中,通过拍摄堤坝抗洪侧,从而识别获取缺口信息,缺口信息包括缺口位置以及形状;当获取所有缺口信息后,控制无人机依次沿缺口所延伸的方向移动与拍摄,此过程中能够获取该缺口对应的流道信息,并遍历获取所有缺口信息对应的流道信息,流道信息包括流道形状以及长度。
8、s2.分析溃口的第一信息,规划探测路径,合理提升探测效率,具体为:所述的探测路径包括区域路径与移动路径,在实际获取第一信息后,堤坝上大多数情况下存在多个缺口信息以及对应的流道信息;
9、按照统一方向汇总缺口信息与流道信息,得到缺口位置集合{q1,q2,q3,...qn}以及流道位置集合{l1,l2,l3,...,ln},而后将缺口位置与流道位置按照指定的规律顺序连接构成探测的区域路径:q1-l1-l2-q2-q3-l3-... qn- ln;
10、其次需要进一步规划无人机在每个区域中具体的移动路径,通过分析缺口信息与流道信息能够获取缺口与流道的形状,从而计算得到缺口与流道长度方向的中心线,相互连通的缺口与流道的中心线为连续的,而不连通的缺口与流道之间将上一流道中心线的端点与下一流道中心线的端点连接以及上一缺口中心线的端点与下一缺口中心线的端点连接,从而形成完整连续单向的移动路径。
11、s3.获取溃口的水下信息以及溃口的第二信息:先获取当前所在缺口或流道的水流速度,在实际探测过程中需要兼顾效率与能耗,在无人机执行沿移动路径行动时,动力装置伸长,通过连杆驱动摆动杆以下横杆为中心线旋转,固定台向下转动进入水中,固定台上设置的多波束测深仪和声学多普勒流速剖面仪对水流速度进行接触式测量,摆动杆另一端的摄像装置则会被抬升至水面上方高处进行拍摄与录制等信息收集,同时通过无人机上搭载的风力检测装置对空气流速进行检测,计算获取无人机在水面航行和空中航行所需动能,从而判定无人机是悬浮还是在水面降落航行,即当水流速度高于设定阈值,无人机悬浮移动采集水下信息以及第二信息;反之,当水流速度低于设定阈值,无人机漂浮移动采集水下信息以及第二信息;
12、其中通过多波束测深仪采集水下信息,水下信息包括溃口水下的形状尺寸,通过摄像装置采集第二信息,第二信息为溃口水上的形状尺寸。
13、s4.结合第一信息、第二信息以及水下信息,汇总获取堤坝上溃口的全部信息进行对比分析,实现高效稳定的堤坝溃口探测与监测。
14、采用上述技术方案,本发明的有益效果在于:
15、1. 本发明的用于堤坝溃口探测的两栖无人机系统,通过拍摄获取溃口的第一信息,并分析第一信息规划探测路径,然后获取溃口的水下信息以及第二信息,对比分析第一信息与第二信息,预测溃口水上崩坏信息,从而实现对堤坝溃口的全面探测和预测,提高了堤坝溃口探测的准确性和及时性。
16、2. 通过无人机搭载多波束测深仪或声学多普勒流速剖面仪(adcp)等设备,可以实现对水下地形的高精度测量,获取溃口的水下信息,为预测溃口水上崩坏信息提供更准确的数据支持。
17、3. 通过无人机的悬浮或漂浮移动方式采集水下信息以及第二信息,可以在不同水深和流速条件下获取可靠的探测数据,提高了探测的适应性和可靠性。
18、4. 本发明的堤坝溃口探测方法以及系统具有操作简便、探测精度高、适应性强等优点,可广泛应用于堤坝防汛、水利工程等领域,为堤坝安全监测和预警提供有效的技术支持。
19、综上所述,本发明结合无人机搭载adcp、多波束测深仪以及摄像装置,控制无人机通过悬浮移动以及漂浮移动的方式,实现以最低能耗的方式对堤坝可能存在的溃口进行监测以及探测,具有操作简便、探测精度高、适应性强等优点,可广泛应用于堤坝防汛、水利工程等领域,为堤坝安全监测和预警提供有效的技术支持。
技术特征:1.用于堤坝溃口探测的两栖无人机系统,其特征在于:包括无人机本体以及设置于无人机本体下方的摆动平台,摆动平台上安装有多波束测深仪、声学多普勒流速剖面仪以及摄像装置;无人机本体包括飞行单元和航行单元,飞行单元包括壳体以及沿壳体四周均匀设置的若干个飞行动力装置,航行单元通过支撑架设置于壳体的下测,摆动平台设置在支撑架上。
2.根据权利要求1所述的用于堤坝溃口探测的两栖无人机系统,其特征在于:航行单元包括两个左右对称设置的浮艇,支撑架包括沿左右方向设置的两根下横杆,两根下横杆左端分别与左侧浮艇顶部的两个连接件固定连接,两根下横杆右端分别与右侧浮艇顶部的两个连接件固定连接,两根下横杆的左侧之间及右侧之间均通过一根下纵杆连接,左侧的下纵杆上和右侧的下纵杆上分别连接有两根倾斜布置的拉杆,四根拉杆上端与壳体底部固定连接。
3.根据权利要求2所述的用于堤坝溃口探测的两栖无人机系统,其特征在于:在前侧的两根拉杆之间固定设有平行于下横杆的上横杆,摆动平台包括垂直并转动连接在下横杆上的两根摆动杆,两根摆动杆的一端设有固定台,多波束测深仪和声学多普勒流速剖面仪设在固定台上,摄像装置设在两根摆动杆的另一端,上横杆连接有用于驱动摆动杆旋转的动力装置,动力装置采用气缸、液压缸或者电缸,动力装置的动力输出端通过连杆与两根摆动杆连接。
4.根据权利要求3所述的用于堤坝溃口探测的两栖无人机系统,其特征在于:摆动杆在上横杆处向下折弯形成钝角结构。
技术总结本发明公开了一种用于堤坝溃口探测的两栖无人机系统,包括无人机本体以及设置于无人机本体下方的摆动平台,摆动平台上安装有多波束测深仪、声学多普勒流速剖面仪以及摄像装置;无人机本体包括飞行单元和航行单元,飞行单元包括壳体以及沿壳体四周均匀设置的若干个飞行动力装置,航行单元通过支撑架设置于壳体的下测,摆动平台设置在支撑架上。本发明结合无人机搭载ADCP、多波束测深仪以及摄像装置,控制无人机通过悬浮移动以及漂浮移动的方式,实现以最低能耗的方式对堤坝可能存在的溃口进行监测以及探测,具有操作简便、探测精度高、适应性强等优点,可广泛应用于堤坝防汛、水利工程等领域,为堤坝安全监测和预警提供有效的技术支持。技术研发人员:张宝森,栗铭阳,刘晓丽,陈冲,赵连军,李春江,燕发源,张小侠,苏磊受保护的技术使用者:黄河水利委员会黄河水利科学研究院技术研发日:技术公布日:2024/5/29本文地址:https://www.jishuxx.com/zhuanli/20240722/221351.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表