一种集成调节装置的快拆无人机的制作方法
- 国知局
- 2024-08-01 06:12:05
本发明属于无人机,具体涉及一种集成调节装置的快拆无人机。
背景技术:
1、无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶飞机相比,无人机+行业应用是无人机真正的刚需,目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
2、在无人机中,桨叶底座和桨叶均属于无人机中重要组成部件,如何将桨叶底座和桨叶进行连接,将直接影响无人机的使用寿命,现有技术中通常在桨叶底座和桨叶之间布置对应的快拆结构,利用快拆结构以完成桨叶底座和桨叶之间的快速拆装。
3、然后,现有的快拆结构中通常采用高精度的装配零件,即快拆结构中的两个零部件对应上后,将直接完成桨叶底座和桨叶的固定,为此,当快拆结构进行多次拆装后,零部件易出现磨损,导致零部件在装配时因磨损导致精度不足,使得零部件之间出现虚位,进而让无人机在飞行过程中桨叶的振动幅度增大,以降低无人机的飞行寿命。
技术实现思路
1、基于此,本发明的目的是提供一种集成调节装置的快拆无人机,以解决上述背景技术中现有的快拆结构中通常采用高精度的装配零件,当快拆结构进行多次拆装后,零部件易出现磨损,导致零部件在装配时因磨损导致精度不足,使得零部件之间出现虚位,进而让无人机在飞行过程中桨叶的振动幅度增大,以降低无人机飞行寿命的技术问题。
2、本发明提出的一种集成调节装置的快拆无人机,包括用于连接桨叶的桨叶固定座、用于与动力源连接的动力固定座以及快拆装置和调节装置;
3、所述桨叶固定座和所述动力固定座活动连接,所述快拆装置包括至少两相互配合的异形件和至少一弹性固定件,至少两所述异形件分别设于所述桨叶固定座和所述动力固定座上,以当所述桨叶固定座和所述动力固定座中的一个相对于另一个活动时,至少两所述异形件之间相互卡接,以用于对所述桨叶固定座和所述动力固定座之间的第一活动方向进行限制;
4、所述弹性固定件设于所述桨叶固定座和所述动力固定座的其中一个上,所述桨叶固定座和所述动力固定座另一个上的一所述异形件、设有供所述弹性固定件中固定部穿设的固定槽,以当两所述异形件相互卡接时,所述固定部伸入所述固定槽内,以用于对所述桨叶固定座和所述动力固定座之间的第二活动方向进行限制,所述第二活动方向和所述第一活动方向不同;
5、其中,所述调节装置设于所述桨叶固定座和所述动力固定座之间,用于调节至少两所述异形件的相对两侧之间的间隙尺寸。
6、进一步的,所述快拆装置包括至少一第一异形件和至少一第二异形件,所述第一异形件和所述第二异形件分别设于所述桨叶固定座和所述动力固定座上;
7、其中,所述第一异形件的一侧与所述桨叶固定座的相对一侧设有供所述第二异形件容纳的第一卡接空间,所述第二异形件的一侧与所述动力固定座的相对一侧设有供所述第一异形件容纳的第二卡接空间。
8、进一步的,所述第一异形件和所述第二异形件的相对两侧分别包括第一倾斜部和第二倾斜部;
9、所述第一倾斜部的倾斜方向和所述第二倾斜部的倾斜方向相反,以使所述桨叶固定座和所述动力固定座中的一个相对于另一个活动时,所述桨叶固定座和所述动力固定座之间的间隙由大逐渐减小。
10、进一步的,所述快拆装置包括多个第一异形件和多个第二异形件;
11、多个所述第一异形件以所述桨叶固定座的中心为原点、间隔设于所述桨叶固定座的一侧边缘,多个所述第二异形件以所述动力固定座的中心为原点、间隔设于所述动力固定座的一侧边缘;
12、其中,每一所述第一异形件均有一所述第一异形件相对设置,且相对设置的两所述第一异形件之间设有间隔以形成、供所述动力固定座和多个所述第二异形件进行活动的活动空间,以当所述动力固定座伸入所述活动空间内进行活动时,每一所述第二异形件和每一所述第一异形件之间相互卡接。
13、进一步的,所述快拆装置包括多个弹性固定件,多个所述弹性固定件均设于所述桨叶固定座上;
14、其中,每一所述第一异形件均设有所述固定槽,且每一所述固定槽与每一所述弹性固定件相对设置,以当每一所述第二异形件和每一所述第一异形件之间相互卡接时,每一所述弹性固定件的固定部均伸入一所述固定槽内进行卡接。
15、进一步的,所述弹性固定件还包括力臂部,所述力臂部穿设所述桨叶固定座的一侧并向外延伸。
16、进一步的,所述调节装置包括调节件、第一凸台和第二凸台,所述第一凸台和所述第二凸台相对设置、且分别设于所述桨叶固定座和所述动力固定座上;
17、其中,所述调节件与所述桨叶固定座和所述动力固定座中的一个活动连接,用于驱动所述第一凸台或所述第二凸台中的一个进行移动,以调节所述第一异形件和所述第二异形件之间的间隙尺寸。
18、进一步的,所述调节件设于所述桨叶固定座内,且所述调节件和所述桨叶固定座之间螺纹连接。
19、进一步的,所述调节件包括调节部和卡齿部,所述调节部和所述桨叶固定座螺纹连接;
20、其中,所述调节装置还包括至少一限位件,所述限位件可拆卸连接于所述桨叶固定座上,以用于朝向所述卡齿部进行运动并卡接。
21、进一步的,所述所述调节装置还包括多个限位件,且多个所述限位件中至少有两所述限位件相对设置。
22、与现有技术相比,本发明的有益效果在于:
23、在本发明提供的集成调节装置的快拆无人机中,通过桨叶固定座上的一异形件和动力固定座上的一异形件相互之间将完成相互卡接,从而完成对桨叶固定座和动力固定座的第一活动方向进行限制,并且当第一卡接件和第二卡接件卡接完毕后,通过弹性固定件伸入固定槽内,从而对桨叶固定座和动力固定座之间的第二活动方向进行限制,利用第一活动方向的限制和第二活动方向的限制,以完成对桨叶固定座和动力固定座的基本固定,并且由于装配的重复次数,导致两异形件之间的装配精度降低,使得桨叶固定座和动力固定座之间出现虚位,该快拆无人机还包括调节装置,调节装置设于桨叶固定座和动力固定座之间,用于调节至少两异形件的相对两侧之间的间隙尺寸,使得当桨叶固定座和动力固定座之间的装配精度降低时,利用调节装置的调节功能,可再次对桨叶固定座和动力固定座之间的缝隙进行压缩,以保障桨叶固定座和动力固定座之间的装配精度,并且无需考虑在初始状态时桨叶固定座和动力固定座的精度,进而解决了现有技术中现有的快拆结构中通常采用高精度的装配零件,当快拆结构进行多次拆装后,零部件易出现磨损,导致零部件在装配时因磨损导致精度不足,使得零部件之间出现虚位,进而让无人机在飞行过程中桨叶的振动幅度增大,以降低无人机飞行寿命的技术问题。
24、附图说明
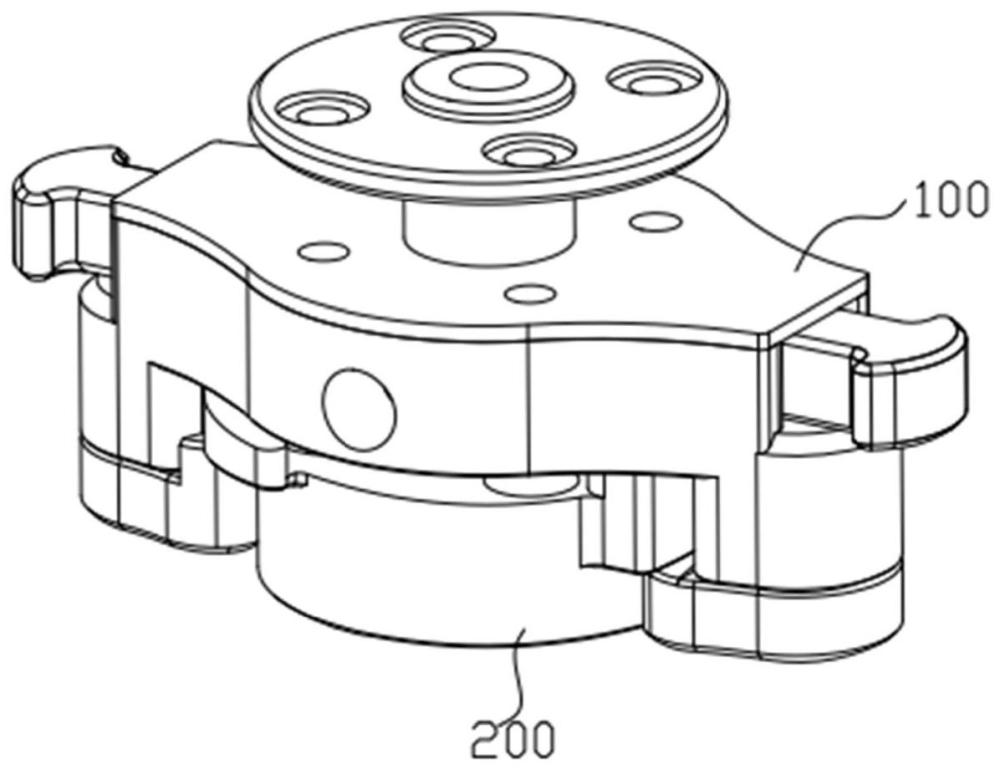
25、图1为本发明一实施例中集成调节装置的快拆无人机的立体图;
26、图2为本发明一实施例中集成调节装置的快拆无人机的俯视图
27、图3为图2的a-a剖视图;
28、图4本发明一实施例中集成调节装置的快拆无人机的爆炸图;
29、图5为本发明一实施例中快拆装置的使用状态图;
30、图6为本发明一实施例中桨叶固定座的一视角立体图;
31、图7为本发明一实施例中动力固定座的一视角立体图。
本文地址:https://www.jishuxx.com/zhuanli/20240722/222878.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表