一种新型倾转多旋翼无人机平台
- 国知局
- 2024-08-01 06:20:13
本发明属于飞行器设计和控制领域,具体涉及一种新型倾转多旋翼无人机平台。
背景技术:
1、多旋翼飞行器一直是飞行器领域的一大研究热点,伴随着飞行控制和新型材料等技术的不断发展,多旋翼的各项性能指标也不断上升,有着结构简单、操作容易、机动灵活、小巧便携等优点。为了满足新的应用需求,克服现有多旋翼的不足,进一步扩展多旋翼飞行器的应用场景,多旋翼的各种布局逐渐多样,机动性、稳定性、控制成熟程度、续航能力、载重能力和通用性,成为评价旋翼飞行器的重要指标。
2、传统多旋翼飞行器包括四旋翼、六旋翼、八旋翼。四旋翼有着结构简单,操作灵活的特点,但稳定性较差,易受外界扰动影响;六旋翼和八旋翼稳定性较好,但是结构复杂,操作要求高。总体来说,传统多旋翼是一个变量多、运动耦合性强的非线性系统,无法实现六自由度全向运动,一定程度上限制了飞行器的灵活程度,直接导致很难独立控制传统多旋翼各自由度进行涉及空中接触的任务。
3、倾转多旋翼是近年来兴起的一大研究方向,其主要分为两大类,一类是与固定翼结合,使飞行器具有较长航时和高速的特点,并且具有一定的垂直起降和悬停的能力,但是此种飞行器的尺寸较大,制造和维修成本高。一类则在传统多旋翼的基础释放机臂的约束,实现电机主动或被动的倾转,完成运动解耦,从而提高飞行器的机动性和灵活度,并在飞行器受扰稳定方面有较大优势,其在控制方面仍是一大难题。
4、可见,当前各种布局的多旋翼飞行器都存在着一定的优点与不足,因此值得进行新构型设计,探索更优组合,挖掘多旋翼无人机的潜能,赋予多旋翼更广阔的应用前景和更新颖的应用方式,为建设功能强大,性能优越的多旋翼作业平台奠定基础。
技术实现思路
1、针对上述问题,本发明提出一种新型倾转多旋翼无人机平台,以搭建具有更强机动性和稳定性的多旋翼空中作业平台。
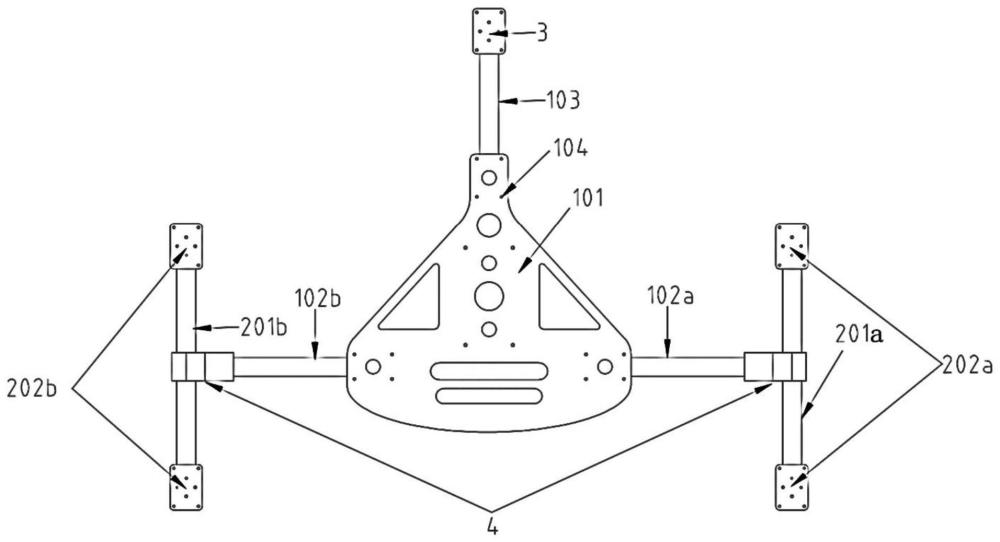
2、本发明一种新型倾转多旋翼无人机平台,包括机身、左右两机臂和共轴反桨机构。所述机身包括中央设备区和机身碳管,机身碳管包括与两机臂连接的横向碳管和搭载尾部动力的尾臂。中央设备区由碳板切割制成,搭载飞行控制所用设备和电池能源,利用铝合金管夹将机身碳管与中央设备区固定。机身整体结构呈t型。在机身后方伸出尾臂,在尾臂末端设置一对共轴反桨机构。左右两机臂由碳管制成,分别与中央设备区左右两侧伸出的横向碳管连接,能绕横向碳管自由旋转。每个机臂的两端各设置一个电机,为无人机提供升力。每个机臂与所连接的横向碳管呈t型。
3、所述共轴反桨机构由两个转向相反的电机组成,两个电机的输出轴方向相反并垂直于无人机主对称面,并对应配备正桨和反桨,使产生的升力方向相同,同时实现反扭力矩自平衡。
4、所述机臂通过轴承与所连接的横向碳管垂直连接,连接点位于机臂的中点;设置在机臂两端的电机的安装方向为输出轴朝上,用于在水平静止时为无人机提供向上升力。
5、所述机臂与横向碳管利用铝合金材质的三通连接件实现连接,机臂贯穿铝合金的三通连接件的直通通道,并使连接件位于机臂中点处,在三通连接件的分支通道中预埋金属轴承,将轴承外环与三通连接件粘接,将轴承内环穿入横向碳管并粘接,实现机臂相对与横向碳管的自由旋转功能。
6、所述共轴反桨机构包含一个长方体连接件,该连接件固连在尾臂末端,并保证该连接件的上下两面与无人机主对称面平行;将两个电机通过螺丝分别固定在该连接件的上下两个平面上,令输出轴向上的电机正转配备正桨,输出轴向下的电机反转配备反桨,保证两电机产生升力的方向一致并能平衡扭矩。
7、所述无人机平台使用pid控制算法实现飞行控制。无人机平台通过外环位置环实现无人机高度位置控制,通过内环姿态环实现无人机姿态控制,外环位置环包括高度、前向距离、侧偏距三个控制通道,内环姿态环包括俯仰、滚转、偏航三个控制通道。在俯仰控制方面,通过尾部电机的拉力与机体的重力共同作用,使机身俯仰姿态满足任务要求;在偏航控制方面,通过正桨电机与反桨电机的差速产生扭矩,使机体绕偏航轴转动;在滚转控制方面,通过左右两机臂的电机差速驱动,产生拉力差,形成滚转力矩。
8、相比现有技术,本发明的优点和积极效果在于:
9、1、本发明提出的一种新型倾转多旋翼无人机平台可以在飞行过程中保证机身的水平角度,降低阻力,同时也便于在机身上增加减阻增升力装置;
10、2、本发明提出的一种新型倾转多旋翼无人机平台的四个旋翼可倾转角度更大,可以提供更大的前飞推力分量,获得更大的巡航速度;
11、3、本发明提出的一种新型倾转多旋翼平台利用轴承释放约束,完成运动解耦,使得飞行器飞行性能优越,可实现急停。
技术特征:1.一种新型倾转多旋翼无人机平台,其特征在于,包括机身、左右两机臂和共轴反桨机构;
2.如权利要求1所述的一种新型倾转多旋翼无人机平台,其特征在于,所述的机臂,通过轴承与所连接的横向碳管垂直连接,连接点位于机臂的中点;设置在机臂两端的电机的安装方向为输出轴朝上,用于在水平静止时为无人机提供向上升力。
3.如权利要求1或2所述的一种新型倾转多旋翼无人机平台,其特征在于,所述的机臂与横向碳管的连接方式为:机臂贯穿铝合金的三通连接件的直通通道,并使连接件位于机臂中点处,在三通连接件的分支通道中内埋金属轴承,将轴承外环与三通连接件粘接,将轴承内环穿入横向碳管并粘接。
4.如权利要求1所述的一种新型倾转多旋翼无人机平台,其特征在于,所述的共轴反桨机构,包含一个长方体连接件,该连接件固连在尾臂末端,并保证该连接件的上下两面与无人机主对称面平行;将两个电机通过螺丝分别固定在该连接件的上下两个平面上,令输出轴向上的电机正转配备正桨,输出轴向下的电机反转配备反桨。
5.如权利要求1所述的一种新型倾转多旋翼无人机平台,其特征在于,所述无人机平台使用pid控制算法实现飞行控制;所述无人机平台分别通过外环位置环和内环姿态环实现无人机高度位置和姿态控制,外环位置环包括高度、前向距离、侧偏距三个控制通道,内环姿态环包括俯仰、滚转、偏航三个控制通道;在俯仰控制方面,通过尾部电机的拉力与机体的重力共同作用,使机身俯仰姿态满足任务要求;在偏航控制方面,通过正桨电机与反桨电机的差速产生扭矩,使机体绕偏航轴转动;在滚转控制方面,通过左右两机臂的电机差速驱动,产生拉力差,形成滚转力矩。
6.如权利要求1所述的一种新型倾转多旋翼无人机平台,其特征在于,所述的无人机平台,在高度通道中先根据无人机目标高度和当前高度通过开平方控制器计算出目标升降速度ahv;再使用pid控制器计算高度通道控制量,用于驱动控制左右两机臂的电机转速和尾部电机转速,如下:
7.如权利要求1所述的一种新型倾转多旋翼无人机平台,其特征在于,所述的无人机平台,在获得四个主电机的目标输出油门和左右两机臂的目标倾转角度后,相应的单轴倾转机臂进行俯仰控制和机臂油门控制;
技术总结本发明公开了一种新型倾转多旋翼无人机平台,属于飞行器设计和控制领域。本发明多旋翼无人机平台的机身包括中央设备区和机身碳管,机身碳管包括与两机臂连接的横向碳管和搭载尾部动力的尾臂;左右两机臂由碳管制成,分别与中央设备区左右两侧伸出的横向碳管连接,能绕横向碳管自由旋转;每个机臂的两端各设置一个电机;在尾臂末端设置一对共轴反桨机构。本发明无人机平台的机臂与机身整体构成H型,尾臂与机身整体构成T型。无人机平台使用PID控制算法实现飞行控制。本发明无人机平台在飞行过程中能保证机身的水平角度,降低环境扰动对平台稳定性的影响,能提供更大的前飞推力分量,获得更大的巡航速度;飞行器可实现急刹。技术研发人员:王松,武荟怡,程昺宸,刘景典,闫茂聪,曾一凡,吴浩南,张楠受保护的技术使用者:北京航空航天大学技术研发日:技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/223356.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表