一种NRHO轨道站位维持方法及系统
- 国知局
- 2024-08-01 06:20:47
本发明涉及航天器,具体涉及一种nrho轨道站位维持方法及系统。
背景技术:
1、nrho(near rectilinear halo orbit,nrho,近直线晕轨道)是一类在地月限制性三体问题中,由l1点或l2点附近的halo轨道演变形成的周期性平动点轨道,其位置位于月球附近,对地球的通信不受月球的遮挡,且可以保证运行其上的航天器长期位于月球南极地区上空,因此nrho轨道对月球极地地区的探测任务具有很大的工程价值。whitley等人从通信和热控等方面对l1和l2点附近的平动点轨道进行了评估,总结了nrho轨道的以下优势:对月通信方面,nrho轨道具有最佳的通信覆盖率,特别是该轨道的近月点距离月球南极很近,有86%的时间都可以对南极地区实施无中继直接通信;在对地通信方面,nrho轨道完全不受月球遮挡,可保持对地通信随时畅通;在热控方面,nrho轨道热环境也相对友好,可减小航天器的热控压力。综上,nrho轨道相比于其它平动点轨道更加适合布设航天器以支持月球南极地区的探测任务。
2、nrho轨道自身虽然具备较高的稳定性,但航天器在长期运行过程中实际轨道仍将偏离标称nrho轨道,同时考虑到导航误差和执行机构误差等误差的存在,轨道的偏离将在较短的时间内发生,从而影响任务的进行,因此需要对航天器进行轨道站位维持。
3、平动点轨道站位维持方法可以分为脉冲推力维持和连续推力维持。其中连续推力维持主要基于控制系统实现,但在应用时控制系统一直工作,导航系统无法实时提供高精度的导航数据,实际应用中存在难度。而脉冲推力维持的常见方法有x轴速度控制、floquet法和靶点法等。x轴速度控制法根据三体条件下周期轨道穿越x-z平面时刻x方向速度为零的特征,对航天器每次穿越x-z平面的x轴方向的速度进行限制,但在真实的动力学环境中并不具备这种特征。floquet法结合了不变流形思想和floquet理论,通过脉冲消去不稳定方向的不稳定状态来实现轨道站位维持,该方法中不稳定方向的不稳定状态是通过floquet模态计算出来的,但floquet理论仅适用于线性时变系统,而平动点的动力学环境非线性程度高,理论难度较大,难以工程实现。
4、连续推力维持和脉冲推力维持中的x轴速度控制、floquet法均有工程应用难度,而marchand和marchand提出的靶点法结构简单,易于工程实现,已经在多个平动点控制任务中得到应用。靶点法是一种将航天器保持在标称轨道附近的方法,首先在轨道上选取靶点,然后在靶点处施加修正速度脉冲从而修正上一个靶点处的站位误差,从而将航天器保持在标称轨道附近。但传统靶点法并未对靶点选择策略做研究,而nrho轨道由于其自身特殊的动力学特性,其轨道维持结果很大程度上依赖于靶点的选择,不合理的靶点选择将会导致维持所需速度增量过大甚至站位维持失效的灾难后果。
5、综上所述,由于nrho轨道自身特殊的动力学特性,传统的平动点轨道站位维持方法并不适用于nrho轨道,因此一种能够满足多种工程约束且能够实现长期低能效果的适用于nrho轨道的站位维持方法是非常必要的。
技术实现思路
1、针对现有技术中存在的轨道维持结果很大程度上依赖于靶点的选择,不合理的靶点选择将会导致维持所需速度增量过大,甚至出现站位维持失效的问题。本发明提供了一种nrho轨道站位维持方法,以nrho轨道单值矩阵特征值是否具有周期轨道特性作为标准筛选可供选择的候选靶点,避免了由于靶点本身的不稳定造成的维持所需速度增量过大乃至维持失效的问题。
2、为达到上述目的,本发明采用了以下技术方案:
3、一种nrho轨道站位维持方法,包括:
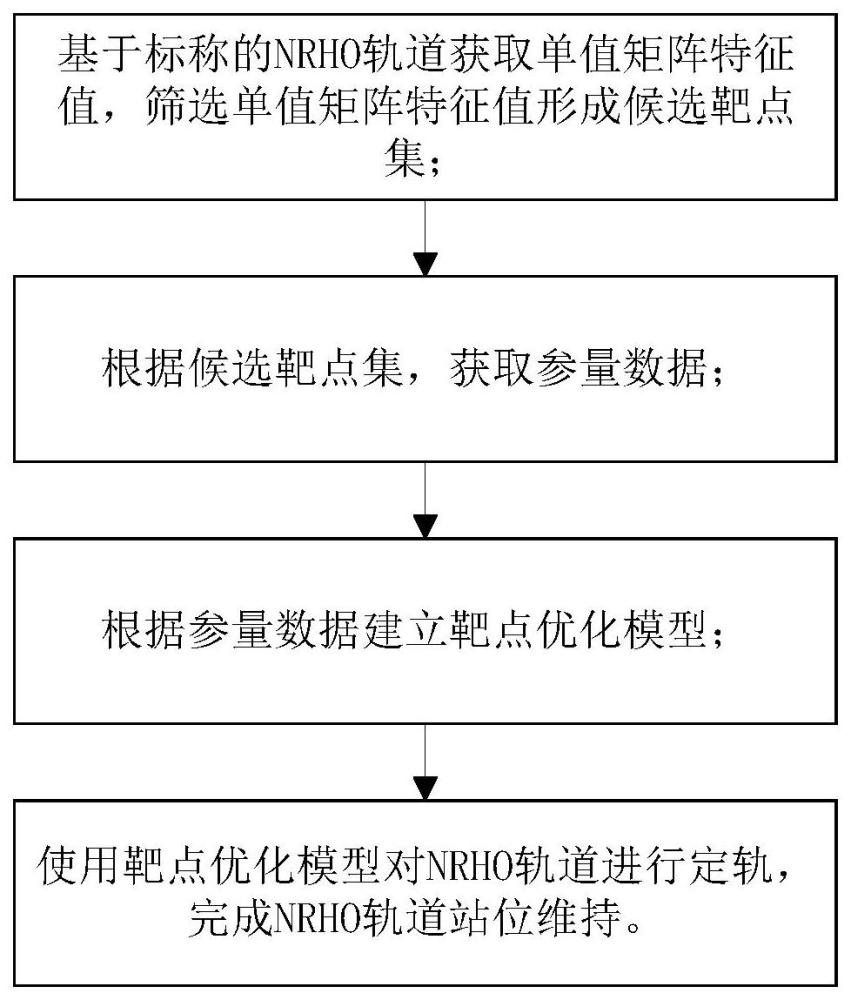
4、基于标称的nrho轨道获取单值矩阵特征值,筛选单值矩阵特征值形成候选靶点集;
5、根据候选靶点集,获取参量数据;
6、根据参量数据建立靶点优化模型;
7、使用靶点优化模型对nrho轨道进行定轨,完成nrho轨道站位维持。
8、作为本发明的进一步改进,所述基于标称的nrho轨道获取单值矩阵特征值,需要将标称的nrho轨道离散为若干个点,计算每个点[r0v0]t的单值矩阵φ(t,0);
9、式中,r0为该点位置信息;v0为该点速度信息;t为nrho轨道周期。
10、作为本发明的进一步改进,所述需要将标称的nrho轨道离散为若干个点,每个点包括位置信息及速度信息。
11、作为本发明的进一步改进,计算所述每个点[r0v0]t的单值矩阵φ(t,0)的特征值,筛选单值矩阵特征值中符合周期轨道特征的点进入候选靶点集。作为本发明的进一步改进,所述参量数据包括优化变量、适应度函数及优化约束。
12、作为本发明的进一步改进,建立所述优化变量,包括:
13、假设每个轨道周期内进行两次维持,从候选靶点集中任意选定两个靶点,考虑到入轨后的第一次维持需要纠正入轨误差,第一次维持的靶点需要单独考虑,所以靶点序列由三个靶点及每次维持对应的时刻构成
14、
15、式中,x_list为表征靶点的状态序列,包括位置和速度信息;t_list为表征靶点的时间序列,表示施加维持脉冲的时间点;x1为负责修正入轨误差,x2为负责修正长期运行中的导航机构误差;x3为负责修正长期运行中的执行机构误差。
16、作为本发明的进一步改进,建立所述适应度函数,包括:
17、在第一个入轨点附近,由于存在入轨误差航天器将偏离入轨点x0,此时需要进行第一次脉冲维持使航天器在预订时间t1能够抵达第一个靶点x1,但是由于导航误差和执行机构误差的存在,航天器将到达第一个靶点附近的位置再次计算机动脉冲使航天器能够到达第二个靶点x2,但同样由于导航误差和执行机构误差的存在,航天器将到达第二个靶点附近的位置以此类推继续施加维持脉冲,使航天器可以纠正上一个靶点处的误差,直到遍历所有靶点序列,获得所有维持所需的速度增量的总和δvtotal即为适应度。
18、作为本发明的进一步改进,建立所述优化约束,包括:
19、δvmin≤δv≤δvmax
20、δt>δtmin
21、δpos≤δposmax
22、式中,δv为每次维持所需脉冲的速度增量大小;δvmin为每次维持所需脉冲的速度增量的最小值;δvmax为每次维持所需脉冲的速度增量的最大值;δt为两次维持之间的时间间隔;δtmin为两次维持之间的时间间隔的最小值;δpos为航天器在维持脉冲作用下到达的实际位置与目标靶点之间的距离;δposmin为航天器在维持脉冲作用下到达的实际位置与目标靶点之间的距离的最大值。
23、作为本发明的进一步改进,所述靶点优化模型,包括:
24、min(||δvtotal||)=min f([x_list,t_list])
25、
26、式中,x_list为靶点的状态序列;t_list为靶点的时间序列;δvtotal为所有维持所需的速度增量的总和;δv为每次维持所需脉冲的速度增量大小;δvmin为每次维持所需脉冲的速度增量的最小值;δvmax为每次维持所需脉冲的速度增量的最大值;δt为两次维持之间的时间间隔;δtmin为两次维持之间的时间间隔的最小值;δpos为航天器在维持脉冲作用下到达的实际位置与目标靶点之间的距离;δposmin为航天器在维持脉冲作用下到达的实际位置与目标靶点之间的距离的最大值。
27、一种nrho轨道站位维持系统,包括:
28、筛选靶点模块:用于基于标称的nrho轨道获取单值矩阵特征值,筛选单值矩阵特征值形成候选靶点集;
29、获取参量模块:用于根据候选靶点集,获取参量数据;
30、建立模型模块:用于根据参量数据建立靶点优化模型;
31、站位维持模块:用于使用靶点优化模型对nrho轨道进行定轨,完成nrho轨道站位维持。
32、与现有技术相比,本发明具有以下有益效果。
33、本发明对传统靶点法的靶点选取策略进行改进,从动力学原理的角度出发,根据标称的nrho轨道单值矩阵特征值,根据单值矩阵特征值进行候选靶点的筛选,避免了由于靶点本身的不稳定造成的维持所需速度增量过大乃至维持失效;然后对靶点序列进行寻优,避开不可控靶点的同时降低维持所需速度增量,在满足工程约束的同时实现nrho轨道的长期低能维持,与传统靶点法相比,本发明不仅显著降低维持所需速度增量,还提高了维持的精度。本发明不仅提高了轨道维持的稳定性和可靠性,还有助于延长航天器的使用寿命。
本文地址:https://www.jishuxx.com/zhuanli/20240722/223420.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表