一种具有可变截面特征的机器鱼仿生机械尾装置
- 国知局
- 2024-08-01 06:35:01
本发明属于工程仿生领域,具体涉及一种具有可变截面特征的机器鱼仿生机械尾装置。
背景技术:
1、海洋占据了地球表面大部分的面积,具有丰富的自然资源,包括矿物资源、海水化学资源、海洋生物资源、海洋动力资源和海洋空间资源等。随着陆地资源日益枯竭,人们把目光投向了拥有丰富自然资源和巨大开发价值的海洋。仿生机器鱼能在复杂水下环境作业、水下探索、水下打捞、海洋生物观察、考古等方面发挥重要作用。自然界鱼类多数采用身体/尾鳍模式游动,该模式主要依靠身体或尾鳍的波动来获得前进的推力,游动速度快,推进效率高,机动性能好。因此,采用该游动模式的机器鱼得到了广泛的研究和应用。
2、研究表明,尾鳍的展弦比、后掠角和刚度等参数会影响机器鱼鱼尾机构的推进效果。展弦比能影响鱼尾获得推进力的大小,后掠角能影响鱼尾所受阻力的大小。展弦比计算公式为式中 l为尾鳍展长, s为尾鳍面积。现有的机器鱼尾部多采用的是不可变形的一体化结构,展弦比不可调整,只能以固定的截面和形状为机器鱼提供前进所需的推力。研究尾鳍截面可变的机器鱼仿生机械尾装置可以在保证其具有一定的推进效率的同时,适应更多使用场景,提高机动能力。例如,在加速阶段通过增大面积、减小展弦比,增加机器鱼的加速度,在高速巡游阶段通过减小面积、增加展弦比来降低阻力,提高运动效率。因此,研制出一种可以改变展弦比的机器鱼仿生机械尾装置具有重要的科学意义。
3、常见的机器鱼鱼尾机构通常也具有一定的推进效率和运行速度,但是结构参数和形状往往不能根据需求而改变。本发明中的仿生机械尾装置除了能为机器鱼提供前进的推力,其创新点主要在于尾鳍机构可以变形以满足不同的使用条件,有助于提高机器鱼在不同场景下的适应能力。
4、与本发明较为相似的技术方案是专利号为cn219884066u公开的一种可变形仿生尾鳍推进装置,cn219884066u公开的技术方案是将两片鳍板装于基座上,二者之间铰接,蒙皮两侧分别贴附在对应鳍板上,在收起蒙皮和鳍板时,蒙皮侧面折叠区域存在凸起,增加前进的阻力。本发明的仿生尾鳍在收起时不存在折叠区域,厚度保持不变,不会产生额外阻力。
技术实现思路
1、本发明的目的是设计一种具有可变截面特征的机器鱼仿生机械尾装置,未来可以应用在采用身体/尾鳍模式推进的水下机器鱼上,为其提供推力,增加机动性。
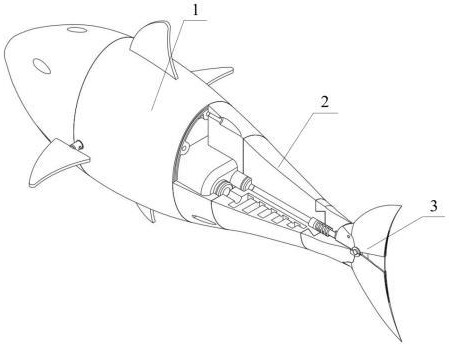
2、一种具有可变截面特征的机器鱼仿生机械尾装置,包括与鱼身连接的尾柄机构和尾鳍机构,本发明借鉴了自然界中鱼类尾部的生物结构和推进机理,尾鳍机构成月牙形结构,尾鳍机构包括推杆、上尾鳍和下尾鳍,推杆左端穿过尾柄螺纹连接有弹簧座,尾柄左端与尾鳍机构连接,弹簧套置在弹簧座外侧并置于尾柄与弹簧之间,在尾柄远端内部装有液压缸,活塞通过液压油管路与弹簧座左侧固定连接,推杆中部开设有长圆孔,上尾鳍和下尾鳍对称设置在推杆两侧,上尾鳍和下尾鳍中部通过转轴滑动并转动连接在长圆孔内,上尾鳍和下尾鳍分别通过连杆一和连杆二分别与推杆转动连接,上尾鳍和下尾鳍左侧部分搭接在推杆左侧。
3、进一步的,上尾鳍和下尾鳍可以绕同一转轴进行转动,实现调整尾鳍机构的展弦比和后掠角。
4、进一步的,推杆能沿鱼身轴线进行往复运动,其运动能使尾鳍机构的边缘形成连续的曲线,同时能填补上尾鳍和下尾鳍之间的缺口使尾鳍机构保持完整。
5、进一步的,在未施加液压力时,上尾鳍和下尾鳍之间错开一个角度α,α为30°。
6、进一步的,弹簧座能调整弹簧初始状态下的预紧力,从而调整驱动尾鳍机构所需的最低压力。
7、进一步的,活塞向尾部推动液体,通过尾柄机构内部的液压油管路到达尾鳍机构,液压力作用在弹簧座和推杆上,当液压力超过弹簧的弹力时,推杆向右运动,带动上尾鳍和下尾鳍运动,实现尾鳍机构的变形。
8、本发明的有益效果:
9、仿生机械尾装置由多个部分组成,各部分之间可以进行相对运动,通过控制液压缸活塞运动的行程可以控制尾鳍机构的变形,控制过程简单,可以快速地改变尾鳍截面的大小,提高了尾鳍的适应性。
10、仿生机械尾装置的尾鳍分为上尾鳍和下尾鳍两个部分,二者可以绕同一转轴转动,并且在转动过程中所转过的角度相同,有助于保持机器鱼的平衡。在尾鳍机构变形的过程中,尾鳍的展弦比和后掠角等影响推进效率的参数会随之改变,起到调整机器鱼的推进效率和阻力的作用。
11、上尾鳍、下尾鳍之间预留的缺口使上尾鳍和下尾鳍在同一个平面内转动,上尾鳍、下尾鳍更加对称,远端为月牙形的推杆补了全尾鳍间的缺口,在尾鳍转动过程中推杆可以保持尾鳍形状完整,提高尾鳍的推进效率。
技术特征:1.一种具有可变截面特征的机器鱼仿生机械尾装置,其特征在于:包括与鱼身(1)连接的尾柄机构(2)和尾鳍机构(3),尾鳍机构(3)成月牙形结构,尾鳍机构(3)包括推杆(6)、上尾鳍(4)和下尾鳍(5),推杆(6)左端穿过尾柄(9)螺纹连接有弹簧座(14),弹簧(10)套置在弹簧座(14)外侧并置于尾柄(9)与弹簧(10)之间,在尾柄(9)远端内部装有液压缸(11),活塞(12)通过液压油管路(13)与弹簧座(14)左侧固定连接,推杆(6)中部开设有长圆孔,上尾鳍(4)和下尾鳍(5)对称设置在推杆(6)两侧,上尾鳍(4)和下尾鳍(5)中部通过转轴滑动并转动连接在长圆孔内,上尾鳍(4)和下尾鳍(5)分别通过连杆一(7)和连杆二(8)分别与推杆(6)转动连接,上尾鳍(4)和下尾鳍(5)左侧部分搭接在推杆(6)左侧。
2.根据权利要求1所述的一种具有可变截面特征的机器鱼仿生机械尾装置,其特征在于:上尾鳍(4)和下尾鳍(5)能绕同一转轴进行转动,实现调整尾鳍机构(3)的展弦比和后掠角。
3.根据权利要求1所述的一种具有可变截面特征的机器鱼仿生机械尾装置,其特征在于:推杆(6)能沿鱼身轴线进行往复运动,其运动能使尾鳍机构(3)的边缘形成连续的曲线,同时能填补上尾鳍(4)和下尾鳍(5)之间的缺口使尾鳍机构(3)保持完整。
4.根据权利要求1所述的一种具有可变截面特征的机器鱼仿生机械尾装置,其特征在于:在未施加液压力时,上尾鳍(4)和下尾鳍(5)之间错开一个角度α,α为30°。
5.根据权利要求1所述的一种具有可变截面特征的机器鱼仿生机械尾装置,其特征在于:弹簧座(14)能调整弹簧(10)初始状态下的预紧力,从而调整驱动尾鳍机构(3)所需的最低压力。
6.根据权利要求1所述的一种具有可变截面特征的机器鱼仿生机械尾装置,其特征在于:活塞(12)向尾部推动液体,通过尾柄机构(2)内部的液压油管路(13)到达尾鳍机构(3),液压力作用在弹簧座(14)和推杆(6)上,当液压力超过弹簧(10)的弹力时,推杆(6)向右运动,带动上尾鳍(4)和下尾鳍(5)运动,实现尾鳍机构(3)的变形。
技术总结本发明公开了一种具有可变截面特征的机器鱼仿生机械尾装置,包括与鱼身连接的尾柄机构和尾鳍机构,本发明借鉴了自然界中鱼类尾部的生物结构和推进机理,尾鳍机构成月牙形结构,尾鳍机构包括推杆、上尾鳍和下尾鳍,推杆左端穿过尾柄螺纹连接有弹簧座,尾柄左端与尾鳍机构连接,弹簧套置在弹簧座外侧并置于尾柄与弹簧之间,在尾柄远端内部装有液压缸,活塞通过液压油管路与弹簧座左侧固定连接,推杆中部开设有长圆孔,上尾鳍和下尾鳍对称设置在推杆两侧,上尾鳍和下尾鳍中部通过转轴滑动并转动连接在长圆孔内,上尾鳍和下尾鳍分别通过连杆一和连杆二分别与推杆转动连接,上尾鳍和下尾鳍左侧部分搭接在推杆左侧。技术研发人员:庞浩,阮周杰,刘思佳,张森,蔡伟杰,刘春宝受保护的技术使用者:吉林大学技术研发日:技术公布日:2024/5/8本文地址:https://www.jishuxx.com/zhuanli/20240722/224366.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表