一种轻质水上机器人及其应用
- 国知局
- 2024-08-01 06:39:07
本发明属于机器人领域,特别涉及一种轻质水上机器人及其应用。
背景技术:
1、软体机器人具有微型化、可控变形、连续运动和高适应性等特征,可实现复杂环境和极端场景下能量获取、信息采集和环境感知等功能,是未来机器人技术发展的重要方向之一。水环境污染已成为全球性问题,严重危害水生物和人类的生命健康。开发智能化水生生态系统,实现对水体环境、水质污染及水生物状态的连续监测,对全球水环境可持续发展有重大意义。设计开发水上机器人,实现对环境能量的主动获取、对水环境信息的主动监测和实时反馈,有利于建立水体、水生生物与人类之间的实时信息交互,对促进智能水生生态系统和环境可持续发展意义重大。然而,传统水生机器人功能单一,通常只能满足运动、或简单信息的获取,无法同时协调水上运动、能量收集和主动传感能力,极大限制了它们在对环境主动感知领域的应用。研究开发可水上自主运动,同时将其运动机械能转化为电能,同步实现对环境信息主动感知的机器人,对推动机器人产业在构建智能水生生态系统和相关领域的发展有巨大意义。
2、协调装置设计同时实现水上自主运动、主动发电和传感检测功能有望开发具有环境主动感知能力的水生机器人。摩擦电纳米发电机(teng)是一种典型的自供电技术,能够将环境中微小的机械能转化为电能,在微电源和自供电传感器领域有重应用潜力。传统的液-固摩擦纳米发电机通常依赖于流体与静态装置间的周期性接触分离并产生电能输出。然而目前没有研究关注水上连续运动的装置对水的摩擦电能的同步采集及应用,其中主要面临的挑战是装置在连续运动时有接触无分离、难以采集水能,难以有效协调运动、机械能-电能转化、及电能主动感知应用。因此,实现水上机器人主动采集能量、自主检测环境并感知水生物状态等协同功能仍面临巨大挑战,相关系统设计也未见报道。
技术实现思路
1、针对现有技术的缺陷,本发明所要解决的技术问题是提供一种轻质水上机器人及其应用。
2、本发明的一种水上机器人,所述水上机器人包括电极、轻质材料与功能填料和/或燃料泵,同时水上机器人在水体上自主运动,并同时产生电能输出,能主动感知环境信息。
3、主动感知环境信息包括:主动检测水体污染物浓度、水质、感知水生生物状态中的至少一种。
4、进一步地,所述机器人基于疏水绝缘轻质材料和功能填料或燃料泵设计成型,在不同驱动下实现了水上自主运动/航行。
5、优选地,所述电极为图案化电极;
6、优选地,所述图案化电极为单个连续电极或多个非连续电极单元组成的图案;所述图案为平形电极图案、方形电极图案、圆形电极图案中的一种或几种;
7、进一步优选地,所述非连续电极图案为平等间隔开的圆形电极图案。
8、优选地,所述电极为导电胶带、导电薄膜、导电涂层中的一种或几种;其中导电胶带为导电布胶带、导电硅胶胶带、导电塑料胶带、导电橡胶胶带、导电金属胶带中的一种或几种。
9、优选地,所述电极中的导电组分包括铂、金、银、铜、镍、铝、碳材料、石墨烯、mxene、碳纳米管、导电聚合物、导电改性材料中的一种或几种。
10、优选地,所述电极设于轻质材料顶部,用于收集机器人与水体之间的相互作用产生的摩擦电能。
11、优选地,所述轻质材料为气凝胶、塑料泡沫、多孔聚合物材料、纤维、多孔木材、金属泡沫、植物叶片中的一种或几种。
12、优选地,所述气凝胶为无机气凝胶(如,tio2气凝胶、sio2气凝胶、sic纤维气凝胶)、有机气凝胶(如,tempo氧化纤维素气凝胶(tcnf)、微晶纤维素气凝胶、聚偏氟乙烯气凝胶)、有机/无机气凝胶复合材料(如,tcnf/mxene气凝胶、乙基纤维素/ fe3o4气凝胶、tcnf/ tio2气凝胶)中的至少一种。
13、进一步优选地,所述气凝胶材料为纤维素基气凝胶。纤维素是一种天然的、多样化且可持续的生物质材料,是地球上最丰富的可再生聚合物。气凝胶是一种以气体为分散介质,具有连续三维网络结构的超轻型多孔材料。纳米纤维素基气凝胶具有优异的性能,包括密度较低、环境友好性、生物相容性、可降解性和绿色可再生性等,在储能、吸附、隔热等领域得到了广泛应用。本领域技术人员可以依据使用目的选择合适的纤维素基气凝胶,纤维素基气凝胶的疏水性、绝缘性越强,水上机器人的自主运动越快、越稳定。
14、所述气凝胶制备方法为溶胶-凝胶法、无机铝盐法、快速凝胶法、模板法、乳液法、浸渍法、化学气相沉积法、3d打印法、碳热还原反应法中的一种或几种,经干燥获得。所述干燥方式为超临界干燥、亚临界干燥法、冷冻干燥法、真空干燥法、常压干燥法、传导干燥法、蒸馏干燥法。
15、优选地,所述塑料泡沫为聚苯乙烯泡沫塑料、聚丙烯泡沫塑料、聚乙烯泡沫塑料、聚碳酸酯泡沫塑料、聚四氟乙烯泡沫塑料、聚氯乙烯泡沫塑料、聚酰胺泡沫塑料、聚氨酯泡沫塑料、聚酯泡沫塑料、酚醛树脂泡沫塑料、环氧树脂泡沫塑料、聚乙烯醇泡沫塑料中的一种或几种。
16、优选地,所述多孔聚合物材料为多孔橡胶类材料、多孔聚烯烃类材料、多孔弹性体类材料中的一种或几种。
17、优选地,所述纤维为纤维碎片、薄膜或毛皮。
18、优选地,所述多孔木材为木材、物理改性多孔木材、化学法改性多孔木材中的一种或几种;其中木材包括杨木、柳木、泡桐木、梧桐木、桦木、红松木、禾木中的一种或几种。
19、优选地,所述多孔橡胶类材料为天然橡胶,异戊橡胶、丁苯橡胶、丁基橡胶、丁腈橡胶、乙丙橡胶、硅橡胶、聚氨基甲酸酯橡胶中的一种或几种;所述多孔聚烯烃类材料为低密度聚乙烯、高密度聚乙烯、聚丙烯、聚乙烯辛烯共弹性体、乙烯-醋酸乙烯酯共聚物、甲基丙烯酸甲酯中的一种或几种。
20、进一步优选地,所述天然橡胶材料为环氧化天然橡胶。
21、优选地,所述多孔弹性体类材料为热塑性苯乙烯类弹性体 tps、热塑性聚烯烃弹性体 tpo、热塑性硫化橡胶 tpv、聚二甲基硅氧烷pdms、苯乙烯一异戊二烯一苯乙烯嵌段共聚物sis、苯乙烯-乙烯-丁烯-苯乙烯嵌段共聚物sebs、乙烯-醋酸乙烯酯共聚物eva、eco-flex中的一种或几种;
22、进一步优选地,所述纤维为植物纤维碎片、植物纤维薄膜、动物纤维毛皮、动物纤维碎片、矿物纤维碎片、矿物纤维薄膜、人造纤维(再生纤维)碎片、人造纤维薄膜、合成纤维碎片、合成纤维薄膜、无机纤维碎片、无机纤维薄膜、纤维气凝胶、泡沫材料中的一种或几种。
23、进一步优选地,所述纤维薄膜为聚偏氟乙烯纤维膜、聚偏二氟乙烯-共-六氟丙烯基薄膜中的至少一种。
24、进一步优选地,所述泡沫材料为发泡聚丙烯泡沫、聚苯乙烯泡沫中的至少一种。
25、优选地,所述轻质材料为疏水绝缘轻质材料;所述疏水绝缘轻质材料拥有疏水或斥水特性,密度为1g/cm3以下;
26、优选地,所述疏水绝缘轻质材料为本征疏水绝缘轻质材料、经疏水和/或绝缘处理的疏水绝缘轻质材料中的一种或几种;
27、优选地,所述疏水处理为表面微纳结构构建、表面疏水涂层加工中的一种或几种;所述表面微纳结构构建方法包括腐蚀、刻蚀、溶胶-凝胶法、激光打印中的一种或几种;所述表面疏水涂层加工包括表面涂层、浸渍处理中的一种或几种;其中表面疏水涂层材料包括含氟涂料(如,1h, 1h, 2h, 2h-全氟辛基三氯硅烷、全氟癸基三乙氧基硅烷)、含硅涂料(如,甲基三甲氧基硅烷、十六烷基三甲氧基硅烷、乙烯基三甲氧基硅烷)、含脂肪链涂料(如,聚乳酸、十六烷基三甲氧基硅烷)中的一种或几种;
28、优选地,所述绝缘处理为表面绝缘处理、浸渍绝缘处理中的一种或几种;所述绝缘材料为有机、无机、有机/无机复合绝缘材料中的至少一种;
29、进一步优选地,所述有机绝缘材料为有机硅树脂、酚醛树脂、环氧树脂、聚酰亚胺中的一种或几种;无机绝缘材料为磷酸盐、硅酸盐、tio2、cr2o3、mgo、zro2、sio2、al2o3中的一种或几种;复合绝缘材料为srtio3改性树脂、sio2/sic改性树脂、fe3o4/ sio2改性树脂、sio2改性树脂中的一种或几种。
30、优选地,所述功能填料为电化学功能填料、光热功能填料、磁功能填料中的至少一种;电化学功能填料为碳纳米管、石墨烯、石墨炔、二硫化钼、mxene、聚吡咯、聚丙烯腈、聚苯胺中的一种或几种;光热功能填料为碳纳米管、石墨烯、石墨、非晶碳、mxene、金属有机框架mof、偶氮苯中的一种或几种;磁功能填料为铁硫化物、fe2o3、 fe3o4、feo、nife2o4中的一种或几种;其中所述功能填料将不同形式能量(电化学能、光热能、磁能)转化机械能,为轻质材料在水面上自主滑行或航行提供动能。
31、优选地,所述功能填料与轻质材料复合;所述燃料泵负载在轻质材料侧面。
32、优选地,所述燃料泵为燃料或由多孔泵体和燃料构成, 所述燃料泵可利用水体化学表面张力差异实现马兰戈尼驱动,实现轻质材料在水面上的运动。
33、进一步地,所述燃料泵由多孔泵体和燃料构成,则多孔泵体用于负载燃料。
34、其中所述多孔泵体为纳米多孔材料;所述纳米多孔材料为有机/无机凝胶、气凝胶、泡沫、木材、金属有机框架mof、共轭有机框架cof、活性炭、沸石、纳米多孔膜、分子筛中的一种或几种。
35、优选地,其中所述燃料为表面张力低于环境水样表面张力的有机、无机液体中的一种或几种;所述液体为二甲基亚砜、乙醇、丙酮、异丙醇、六氟异丙醇、四氢呋喃、聚乙烯醇、n,n-二甲基甲酰胺、乙二醇、表面活性剂溶液、牛血清白蛋白溶液中的一种或几种。
36、机器人可实现自主连续运动的燃料为二甲基亚砜、乙醇、丙酮、异丙醇、六氟异丙醇、四氢呋喃、聚乙烯醇、n,n-二甲基甲酰胺、乙二醇、表面活性剂溶液、牛血清白蛋白溶液中的一种或几种。
37、进一步优选地,所述最佳燃料为乙醇。
38、优选地,所述水体上自主运动,其中水体为超纯水、蒸馏水、去离子水、自来水、河水、湖水、海水、雨水、工业废水、生活污水、农业废水中的一种或几种;所述自主运动为通过马兰戈尼效应、电化学推动、电磁驱动、磁驱动、光热驱动中的一种或几种产生的自主运动;其中自主运动方式为间歇运动、振荡运动、连续运动中的一种或几种。
39、通过调节不同水体种类、水体中杂质种类、水体中杂质浓度、机器人运动轨迹、燃料种类、燃料用量、电极图案、电极数目中的至少一种,调控水上机器人运动产生差异化电压,通过差异化电压实现对水环境信息的主动感知和/或检测,或通过装载生物响应燃料泵或功能填料的机器人可以与水生生物相互作用。
40、进一步地,所述杂质的浓度为0.01~99%;燃料的用量为0.1~1000 μl;电极数目为1~100 条。
41、所述水中杂质为离子盐、酸/碱、有机物中的一种或几种。
42、所述离子盐为kcl、k2so4、k2co3、nacl、na2so4、na2co3、licl、mgcl2、cacl2、cocl2、alcl3、中的一种或几种;有机物为乙醇、正丙醇、异丙醇、六氟异丙醇、乙二醇、甘油、乙醛、乙酸、丙酮、乙二酸、四氢呋喃、二甲基亚砜、亚甲基蓝、酸性红中的一种或几种; 酸为甲酸、乙酸、丙酸、乙二酸、硫酸、盐酸、硝酸、磷酸中的一种或几种;碱为氢氧化钠、氢氧化钾、氨水中的一种或几种。
43、进一步地,利用含有不同杂质或不同浓度杂质的水中电荷量差异,机器人可以产生与杂质浓度成线性关系的电压信号,自动检测水质。
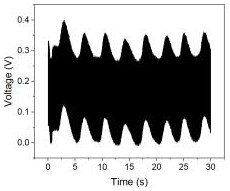
44、所述机器人水上自主运动的机器人其速度可控范围达到1~300 mm/s,机器人在自主运动过程中可收集0.01~0.8 v摩擦电。
45、所述水上机器人在自主运动过程中实现能量获取、信息采集和环境感知的应用。所述应用包括以下内容:机器人顶部图案化电极设计,机器人与水之间摩擦电的采集,机器人电能输出与水体杂质浓度的量化关系;机器人对水生生物运动状态的主动感知。
46、本发明的一种所述水上机器人在环境、能源、信息、智能水生生态系统、国防领域中的应用。
47、所述水上自主运动机器人在环境、能源、信息、智能水生生态系统及国防等领域的应用为发电、传感、显示、自供电系统、人-机交互应用。
48、优选地,所述环境领域的应用为环境探索、自主水质检测、污染源定位中的一种或几种;
49、优选地,所述能源领域包括摩擦电能量收集、压电能量收集、环境能量自主利用、量化传感中的一种或几种;
50、优选地,所述信息领域包括环境感知、水上导航、通信、操纵、探测、勘探中的一种或几种;
51、优选地,所述智能水生生态系统领域包括水生生物监测、生态系统服务、生态系统修复、水体能量-信息交互中的一种或几种;
52、优选地,所述国防领域包括极端环境下执行任务、伪装、导航、海洋监测领域的应用。
53、本发明第一方面,提供一种可以在水面上自主运动的轻质机器人,所述机器人基于疏水绝缘轻质材料设计,利用马兰戈尼效应、电化学推动、电磁驱动、磁驱动、光热驱动等方式中的一种或其组合,实现了机器人在水面上自主滑行或航行。
54、本发明的目的在于提供了一种具有环境主动感知能力的轻质水上机器人,该机器人可以在水上自主运动的过程中实现能量获取、信息采集和环境感知应用。
55、相比于现有技术,本发明采用疏水绝缘轻质材料与功能填料或燃料泵的组合方式,可以轻易实现机器人在不同刺激下的水上运动。比如,燃料泵可利用水体化学表面张力差异实现马兰戈尼驱动;光热填料可利用物理光-热转移效应实现水上驱动;磁填料可利用磁场动态耦合磁力矩作用实现水上驱动。与现有机器人相比,本发明采用简洁配方和技术,实现了机器人水上自推进方式的多样化和运动机制协同组合的可行性。机器人的运动设计可与机器人本体和其他功能模块分开制造,这极大的简化了机器人的制造过程。该方法对实验设备、材料和加工环境要求低,工艺简单、成本低易操作,便于实现机器人的性能调控和规模化生产。
56、依据本发明的研究结果,开发的水上自主运动的机器人其速度可控范围达到1~300 mm/s。基于该效果,本发明还提供所述水上自主运动机器人在运动的过程中实现能量获取、信息采集和环境感知应用。
57、本发明第二方面,提供第一方面所述水上机器人在自主运动过程中实现能量获取、信息采集和环境感知的应用。所述应用包括以下内容:在机器人的顶部设计图案化电极,收集机器人与水之间的相互作用产生的摩擦电能;利用含有不同杂质或不同浓度杂质的水中电荷量差异,机器人可以产生与杂质浓度成线性关系的电压信号(如电压会成随着杂质浓度的升高而减小),自动检测水质;此外,装载生物响应燃料泵或功能填料的机器人可以与水生生物相互作用,比如感知鱼的运动状态。证实所述轻质机器人可同时实现水上运动、能量收集、环境检测及水生生物感知等协同功能。
58、有益效果
59、本发明公开了一种无需电源的、具有环境主动感知能力的轻质水上机器人、其制备方法及应用。该机器人基于疏水绝缘轻质材料和图案化电极设计,其拥有自发水上运动能力和固-液摩擦发电能力,可实现在水面自主运动,同时将其运动机械能转化为电能,并利用电学输出主动感知环境信息。本发明首次证实软体机器人可同时实现水上运动、能量转化和环境检测等协同能力,极大地拓展了机器人开发策略和环境主动感知等领域应用;
60、本发明所提供的可自主运动的水上轻质软机器人,制备简单、成本低、对设备、材料、环境要求低,其运动方式、响应机制和感知对象可调控性强,规模化生产潜力大。典型地,机器人在自主运动过程中可收集0.01~0.8 v摩擦电,利用线性特征的差异化电压可实现对水环境多重信息(水质、污染物、水生物状态等)的主动感知和检测。相比现有水上机器人的设计与研究策略,本方案采用广谱性材料和简单设计实现了机器人自主运动、信息采集和环境感知,对水上机器人设计和智能水生生态系统的构建和发展有重要启发和推动作用。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224620.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表