一种微小型拍摄水下机器人控制系统
- 国知局
- 2024-08-01 06:39:33
本发明涉及一种低成本的微小型拍摄水下机器人,属于民用水下机器人领域。
背景技术:
1、有缆遥控水下机器人(rov,remotely operated vehicle)是探测和开发海洋的“先锋”,已经成为一种重要的水下作业装备,并广泛应用于内河堤坝检测、海洋工程结构物安装与维修、深海资源探测、海洋管线检修、水下搜救等领域。特别是以rov与潜水员潜水相结合的水下作业方法已成为海洋工程水下结构检测与清污技术的重要模式。由于担负深海探测任务,这类rov的本体结构会相对复杂,成本高,比如设置多个舱:控制舱、电源舱、拍摄舱等,为了满足拍摄俯仰角度需要rov进行俯仰调节,这种控制不但需要rov具有调节俯仰机构,使结构变得复杂,而且俯仰操作会增大rov阻力,控制稳力性差。
2、随着海洋娱乐业的大力开发,水下娱乐用拍摄型机器人的民用市场需求越来越大。但是目前用于深海探测的rov闭环控制,其存在结构复杂、成本高、操作难度大问题,不适合应用于民用市场中。
技术实现思路
1、针对现有深海探测rov结构复杂、成本高、操作难度大,不适合应用于民用市场中的问题,本发明提供一种微小型拍摄水下机器人控制系统。
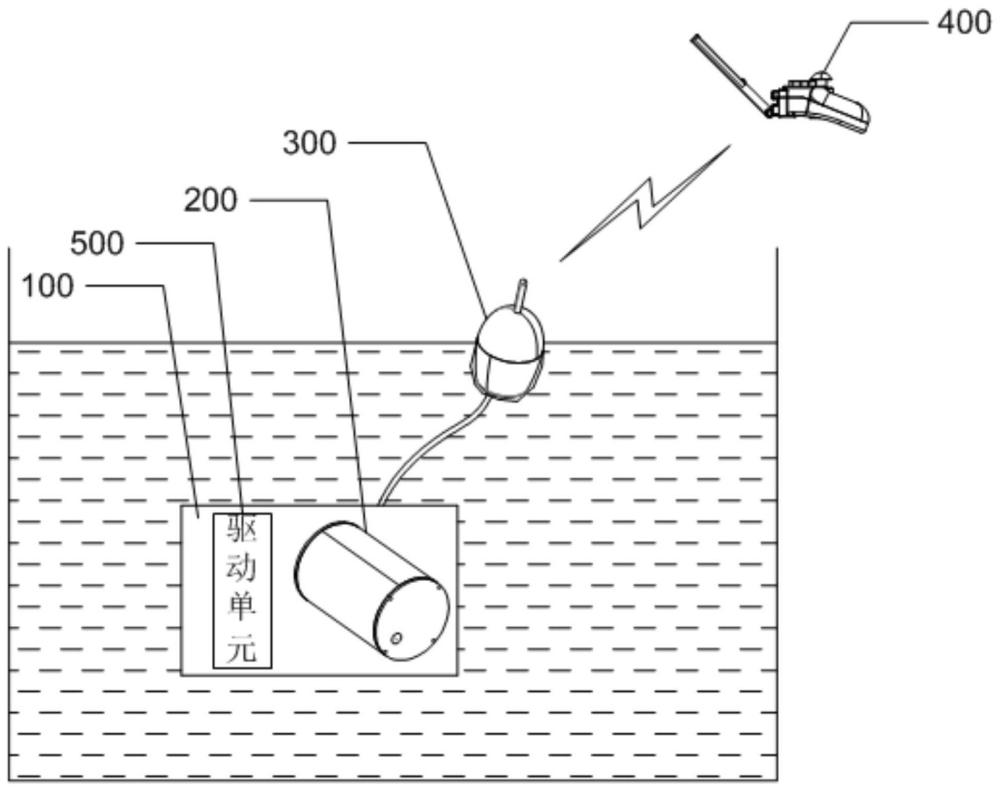
2、本发明所述一种微小型拍摄水下机器人控制系统,包括rov本体100、电子舱200、浮漂300和控制手柄400;
3、rov本体100搭载电子舱200,rov本体100连接浮漂300,rov本体100潜于水下,浮漂300浮于水上;
4、浮漂300搭载信号接收器301;
5、电子舱200搭载摄像头205;
6、控制手柄400与浮漂300无线通讯进而控制水下rov本体100的姿态和摄像头205拍摄角度。
7、优选地,电子舱200包括舱筒、端板207、承压板201、pcb板202、主板处理器203、支撑六角铜柱204、摄像头205、补光灯206、舵机辅助固定轴208和舵机209;
8、舱筒的两端各设置一块端板207,舱内为双层板结构,双层板结构的承压板201和pcb板202的四角用支撑六角铜柱204固定连接;下层的pcb板202上设置有主板处理器203,上层的承压板201上设置摄像头205,摄像头205两侧设置补光灯206;双层板的一端中心通过舵机辅助固定轴208连接在一侧端板207的圆心处,双层板的另一端中心通过舵机209连接在另一侧端板207的圆心处;
9、控制手柄400的拍摄角度调节指令利用无线通讯发送给信号接收器301,信号接收器301将该指令发送给主板处理器203,主板处理器203控制舵机209工作,带动双层板旋转,进而带动摄像头205进行俯仰调节,达到控制拍摄角度的目的。
10、优选地,rov本体100还搭载驱动单元500,所述驱动单元500包括左侧水平推进器501、右侧水平推进器502和垂向推进器503;左侧水平推进器501和右侧水平推进器502设置于rov本体100的尾部两侧,用于控制rov本体100的水平运动,垂向推进器503设置于rov本体100的中部。
11、优选地,控制手柄400包括通过转轴连接的显示器401和手柄操作本体402,手柄操作本体402上表面中部设置左侧摇杆403和右侧摇杆404,手柄操作本体402前端左侧设置有左侧上肩键405和左侧下肩键406;手柄操作本体402内部设置有信号发射器409;
12、左侧摇杆403前后移动指令通过信号发射器409、信号接收器301发送至主板处理器203,主板处理器203控制左侧水平推进器501、右侧水平推进器502以相同转速同时正转或反转,进而控制rov本体100前进或后退;
13、左侧摇杆403左右移动指令通过信号发射器409、信号接收器301发送至主板处理器203,主板处理器203控制左侧水平推进器501、右侧水平推进器502以差速方式同时正转或反转,进而控制rov本体100左转或右转;
14、右侧摇杆404前后移动指令通过信号发射器409、信号接收器301发送至主板处理器203,主板处理器203控制舵机209发生对应角度转动,根据pwm波占空比不同提供±45°的旋转角度,使得舵机209带动双层板结构和摄像头205进行最大俯视45°、最大仰视45°的视野旋转;
15、按动左侧上肩键405,将升起指令通过信号发射器409、信号接收器301发送至主板处理器203,主板处理器203控制垂向推进器503正转,进而控制rov本体100上升;
16、按动左侧下肩键406,将下降指令通过信号发射器409、信号接收器301发送至主板处理器203,主板处理器203控制垂向推进器503反转,进而控制rov本体100下降。
17、优选地,手柄操作本体402还包括控制手柄模式切换键407和控制手柄开关408,
18、控制手柄400包括运行模式和调试模式,控制手柄模式切换键407用于在运行模式和调试模式之间切换;
19、调试模式时,首先启动电子舱200,浮漂300搭载的信号接收器301得电,浮漂300的配对灯光闪烁;然后打开控制手柄开关408,利用控制手柄模式切换键407切换至调试模式,信号发射器409和信号接收器301进行配对,手柄指示灯常亮则代表配对成功;
20、运行模式时,配对成功后,利用控制手柄模式切换键407切换至运行模式,手柄操作本体402正常发送指令。
21、优选地,控制手柄400与浮漂300无线通讯采用2.4ghz无线通信。
22、优选地,浮漂300还搭载图传模块302,摄像头205拍摄的图像通过图传模块302以无线通讯的方式发送至显示器401上显示。
23、优选地,显示器通过接收48ch频道的特定频率信号与图传模块302相连。
24、优选地,主板处理器203采用stm32f103rct6主控芯片。
25、本发明的有益效果:本发明是针对民用的微小型拍摄水下机器人设计,本发明rov采用开环控制方式,成本低。
26、本发明将摄像头、补光灯融合进主控电子舱中,一舱多用,契合微小型的要求。
27、本发明电子舱内部携带舵机,可控制电子舱旋转角度,即摄像头旋转角度,弥补了机器人由于欠驱动无法俯仰的问题。同时这样做节约了成本,且不影响拍摄体验。进一步的,由于摄像头拍摄上下(俯仰)视角时,不需要进行机器人俯仰调节,只需要机器人内部电子舱的舵机带动内部的双层板结构转动,使得机器人可始终保持水平的姿态,能够显著减小阻力,增加控制的稳定性。本发明的设计对于机器人的操控和拍摄都有比较好的意义,既简单便捷又高效。
28、本发明适用于垂钓观察、家庭娱乐、水下摄影、团建培训等多种场景,具有体积小、操纵简单、功耗低、价格低的特点。
技术特征:1.一种微小型拍摄水下机器人控制系统,其特征在于,包括rov本体(100)、电子舱(200)、浮漂(300)和控制手柄(400);
2.根据权利要求1所述一种微小型拍摄水下机器人控制系统,其特征在于,电子舱(200)包括舱筒、端板(207)、承压板(201)、pcb板(202)、主板处理器(203)、支撑六角铜柱(204)、摄像头(205)、补光灯(206)、舵机辅助固定轴(208)和舵机(209);
3.根据权利要求2所述一种微小型拍摄水下机器人控制系统,其特征在于,rov本体(100)还搭载驱动单元(500),所述驱动单元(500)包括左侧水平推进器(501)、右侧水平推进器(502)和垂向推进器(503);左侧水平推进器(501)和右侧水平推进器(502)设置于rov本体(100)的尾部两侧,用于控制rov本体(100)的水平运动,垂向推进器(503)设置于rov本体(100)的中部。
4.根据权利要求3所述一种微小型拍摄水下机器人控制系统,其特征在于,控制手柄(400)包括通过转轴连接的显示器(401)和手柄操作本体(402),手柄操作本体(402)上表面中部设置左侧摇杆(403)和右侧摇杆(404),手柄操作本体(402)前端左侧设置有左侧上肩键(405)和左侧下肩键(406);手柄操作本体(402)内部设置有信号发射器(409);
5.根据权利要求4所述一种微小型拍摄水下机器人控制系统,其特征在于,手柄操作本体(402)还包括控制手柄模式切换键(407)和控制手柄开关(408),
6.根据权利要求4所述一种微小型拍摄水下机器人控制系统,其特征在于,控制手柄(400)与浮漂(300)无线通讯采用2.4ghz无线通信。
7.根据权利要求4所述一种微小型拍摄水下机器人控制系统,其特征在于,浮漂(300)还搭载图传模块302,摄像头(205)拍摄的图像通过图传模块302以无线通讯的方式发送至显示器(401)上显示。
8.根据权利要求7所述一种微小型拍摄水下机器人控制系统,其特征在于,显示器(401)通过接收48ch频道的特定频率信号与图传模块302相连。
9.根据权利要求2所述一种微小型拍摄水下机器人控制系统,其特征在于,主板处理器(203)采用stm32f103rct6主控芯片。
技术总结一种微小型拍摄水下机器人控制系统,属于民用水下机器人领域,本发明为解决现有深海探测ROV结构复杂、成本高、操作难度大,不适合应用于民用市场中的问题。本发明包括ROV本体、电子舱、浮漂和控制手柄;ROV本体搭载电子舱,ROV本体连接浮漂,ROV本体潜于水下,浮漂浮于水上;浮漂搭载信号接收器;电子舱搭载摄像头;控制手柄与浮漂无线通讯进而控制水下ROV本体的姿态和摄像头拍摄角度。本发明适用于垂钓观察、家庭娱乐、水下摄影、团建培训等多种场景。技术研发人员:孙延超,宋裕恒,孙宝贺,陈圆荘,毕意翔,欧阳陵鹏,许艺瀚,林宇涵,杨侨欣,秦洪德受保护的技术使用者:哈尔滨工程大学技术研发日:技术公布日:2024/5/12本文地址:https://www.jishuxx.com/zhuanli/20240722/224660.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表