一种用于船体的垃圾清理水下机器人
- 国知局
- 2024-08-01 06:44:49
本发明涉及船体的垃圾清理,具体为一种用于船体的垃圾清理水下机器人。
背景技术:
1、船底长时间泡在海水中,时间长了,船体表面会产生铁锈,同时渐渐地也会滋生一些藻类植物。随着这些藻类的不断生长,慢慢地也可以为其他的海洋动物提供食物,所以也会吸引其他的一些海洋生物(例如藤壶)到来,轮船在大海中漂泊的时间越长,船底所吸附的海鲜就会越多,渐渐地就会改变轮船船底的表面结构,所造成的影响就是轮船的航行速度变慢,同时也会造成耗油量增加。第一种原因是这些船底的海鲜增加了阻力,也就会增加耗油量;第二种原因就是这些船底的海鲜也会使船舶增加重量,从而增加耗油量,而且船底带有比较多的海洋生物,也有可能会对停靠的港口造成生物入侵。
2、清理的时候,通常就是将船底的所有海鲜和表面铁锈一次性清除掉,一般就是让潜水人员穿上专业的设备,再拿起铲子对着那个关键的部位进行清理,或者使用水下清洁机器人对海洋生物和铁锈进行刮除。
3、但是清理的工作量较大,仅仅是依靠潜水人员清理效率很低,需要的时间很长,而水下清洁机器人多数只是将船体上附着的海洋生物简单刮除,被刮除的海洋生物容易再次附着在船体上,并没有解决生物入侵的问题,同时在海里经常存在暗礁、暗石,还会有一些海洋生物在机器人清洁作业时撞击机器人,机器人的防护措施不强,抗冲击能力差,得不到较好的防护,容易损坏,并从船体上脱落。
技术实现思路
1、基于此,本发明的目的是提供一种用于船体的垃圾清理水下机器人,以解决上述背景中提出的技术问题。
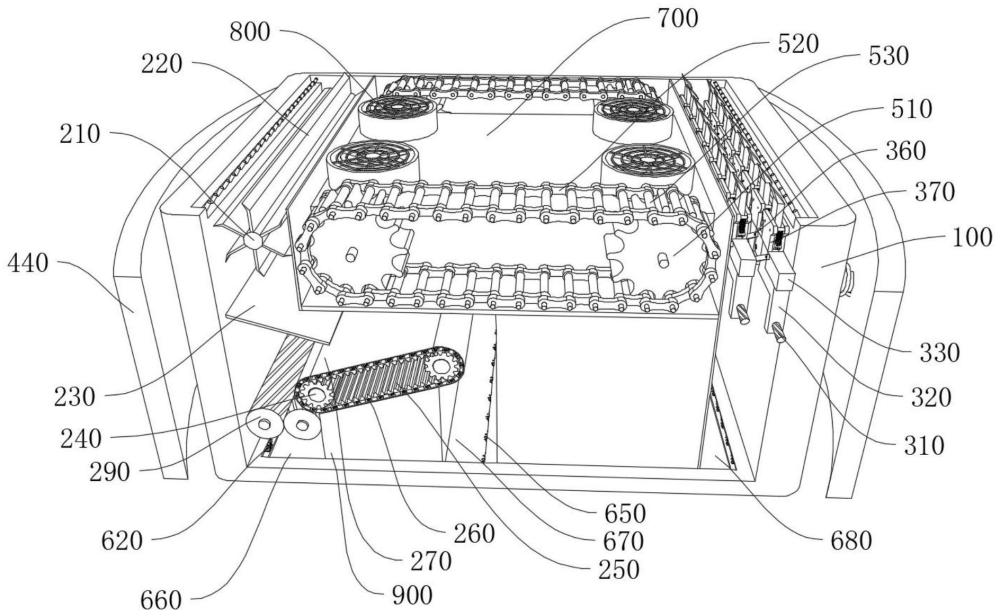
2、为实现上述目的,本发明提供如下技术方案:一种用于船体的垃圾清理水下机器人,包括机器人外壳,所述机器人外壳的内壁转动连接有清洁机构,所述机器人外壳的内壁固定连接有刮除机构,所述机器人外壳的外壁固定连接有防撞机构,所述机器人外壳的内壁开设有防掉落机构,所述机器人外壳的内部设置有导流机构;所述清洁机构包括有与机器人外壳内壁转动连接的转轴,所述转轴的外壁固定连接有刮板,所述机器人外壳内壁位于转轴的下方固定连接有导向板,所述机器人外壳内壁一侧内壁位于导向板的下方转动连接有传送轮,所述传送轮啮合有第一传送带,所述第一传送带的外壁固定连接有电磁圈,所述电磁圈的顶端固定连接有第二传送带,所述电磁圈移动贴合有导电块。
3、作为本发明的一种优选技术方案,所述导电块与机器人外壳之间固定连接,所述第二传送带的下方贴合挡块,所述电磁圈设置有多组,所述机器人外壳内壁位于传送轮的下方转动连接有破碎辊,所述破碎辊设置有两组。
4、作为本发明的一种优选技术方案,所述刮除机构包括有与机器人外壳内壁固定连接的定位块,所述定位块外壁滑动连接有移动块,所述移动块的内壁螺纹套接有螺纹杆,所述螺纹杆与机器人外壳之间转动连接,所述移动块上开设有限位槽,所述限位槽内滑动连接有限位块,所述限位块与定位块之间固定连接,所述移动块的一侧固定连接有弧度调节组件,所述弧度调节组件的顶端固定连接有刮除组件,所述弧度调节组件和刮除组件均设置有多组。
5、作为本发明的一种优选技术方案,所述弧度调节组件包括有与移动块一侧固定连接的固定板,所述固定板的内壁固定连接有第一连接轴,所述第一连接轴的外壁转动套接有转动板,所述转动板的一侧固定连接有转动块,所述转动块的一侧固定连接有第二连接轴,所述第二连接轴的外壁转动套接有连接杆,所述连接杆的内壁转动连接有第三连接轴,所述第三连接轴与定位块之间固定连接,所述固定板的一侧固定连接有第四连接轴,所述第四连接轴与连接杆之间转动连接,所述第二连接轴、连接杆、第三连接轴和第四连接轴均设置有两组,两组所述第二连接轴、连接杆、第三连接轴和第四连接轴对称设置在固定板的两侧,所述转动块的顶端固定连接有刮除组件。
6、作为本发明的一种优选技术方案,所述刮除组件包括有与转动块顶端固定连接的连接板,所述连接板的一侧固定连接有定位轴,所述定位轴的外壁转动套接有y形块,所述y形块的顶端固定连接有铲板,所述连接板的一侧固定连接有固定轴,所述固定轴的外壁固定连接有第一弹簧,所述第一弹簧的一端与y形块之间固定连接,所述连接板的内壁固定连接有限位轴,所述连接板、第一弹簧、固定轴和限位轴均设置有两组,两组所述连接板、第一弹簧、固定轴和限位轴对称设置在y形块的两侧。
7、作为本发明的一种优选技术方案,所述防撞机构包括与机器人外壳一侧固定连接的第二弹簧,所述第二弹簧的一端固定连接有弧形防护板,所述弧形防护板的一侧固定连接有滑动杆,所述滑动杆与机器人外壳之间滑动连接,所述机器人外壳上开设有缓冲槽,所述缓冲槽的内壁滑动连接有滑块,所述滑块与滑动杆之间固定连接,所述缓冲槽的槽内固定连接有触碰开关,所述滑块的一侧固定连接有顶块,所述滑块的一侧固定连接有第三弹簧,所述第三弹簧的一端固定连接在缓冲槽内。
8、作为本发明的一种优选技术方案,所述第三弹簧设置有多组,多组所述第三弹簧以顶块为轴心圆周阵列设置,所述弧形防护板设置有四组,四组所述弧形防护板以机器人外壳为轴心圆周阵列设置,所述缓冲槽、滑块、滑动杆、第二弹簧、顶块、触碰开关和多组第三弹簧为缓冲组,所述缓冲组设置有多组。
9、作为本发明的一种优选技术方案,所述防掉落机构包括有与机器人外壳内壁转动连接的传动轮,所述传动轮啮合有转动带,所述机器人外壳内壁上开设有滑槽,所述滑槽内固定连接有导电片,所述滑槽内滑动贴合有电磁铁,所述电磁铁与转动带之间固定连接,所述电磁铁设置有多组,所述传动轮设置有两组,所述导电片与触碰开关之间电性连接。
10、作为本发明的一种优选技术方案,所述防掉落机构设置有两组,两组所述防掉落机构对称设置在机器人主体的两侧,所述机器人主体的顶端固定连接有推进器,所述推进器设置有四组,所述机器人主体与机器人外壳之间固定连接。
11、作为本发明的一种优选技术方案,所述导流机构包括有机器人外壳上开设的第一槽口,所述第一槽口的一侧开设有槽体,所述槽体内固定设置有第一涡轮风扇组,所述机器人外壳内开设有导水槽,所述导水槽的顶端固定连通有高压喷水口,所述机器人外壳上位于第一槽口的一侧开设有第二槽口,所述第二槽口的一侧设置有第二涡轮风扇组,所述机器人外壳上位于第一槽口的一侧开设有第三槽口,所述槽体,第一涡轮风扇组,导水槽和高压喷水口均设置有两组,两组所述槽体,第一涡轮风扇组,导水槽和高压喷水口对称设置在第二槽口的两侧。
12、综上所述,本发明主要具有以下有益效果:
13、本发明通过设置清洁机构对船体表面的藤壶等生物和铁锈进行清理,再将藤壶等生物与铁锈分开处理,对藤壶等生物进行破碎,防止其跨海域生存,造成生物入侵,同时刮除机构可更加贴合船体弧度对船体表面较为顽固的污垢铁屑等进行刮除,导流机构配合清洁机构和刮除机构对船体上附着的垃圾进行高压冲刷,使得清洁机构和刮除机构更加轻松地对船体进行清理;
14、本发明通过设置防掉落机构,在清理过程中海洋生物撞到清理机器人时,防撞机构可对撞击力进行缓冲,减小撞击对本装置的影响,同时带动防掉落机构吸附住船体,防止机器人从船体上脱离,对机器人进行保护。
本文地址:https://www.jishuxx.com/zhuanli/20240722/224901.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。