一种用于海底采样的回转体水下航行器
- 国知局
- 2024-08-01 06:44:52
本发明属于水下机器人设计领域,尤其涉及一种用于海底采样的回转体水下航行器。
背景技术:
1、海洋是未知生物、矿产资源以及替代能源和可持续能源的潜在来源,但由于海洋环境特殊,自然条件苛刻,因此海洋探测与资源开采基本不能由人来亲自完成,机器人机械手系统从而被认为是最适合执行水下干预操作的工具,可用于近海石油和天然气的资源勘探、土木工程、海洋科学等众多领域。
2、过去,水下航行器配备机械臂大多采取悬挂式,在长距离航行中大大提高了航行阻力,仅适用于近距离悬停采样。并且海洋中取样的方式大部分是用机械臂夹取采样管进行遥控取样,过程繁琐。针对水体取样,现阶段有很多水下机器人本身携带采样模块进行水体取样,但大都是大范围取样,无法实现定点的取样。
3、学术文献"autonomous underwater panel operation by girona500uvms:apractical approach to autonomous underwater manipulation,"2015ieeeinternational conference on robotics and automation(icra),seattle,wa,usa,2015,pp.529-536,doi:10.1109/icra.2015.7139230.公开了一种girona500机器人机械手系统,将机械手悬挂在auv前端,适用于近距离取样,但在长距离航行中提高了水中阻力,无法兼顾长距离航行与悬停取样。
4、学术文献syprid sampler:alarge-volume,high-resolution,autonomous,deep-ocean precision plankton sampling system[j].deep sea research part ii:topicalstudies in oceanography.2017,137:297-306.公开了一种浮游生物采样装置,该装置安装水下航行器上,只能在一定深度和一定范围内进行水体取样,取样位置范围大,取样目标不精确。
5、学术文献"i-auv mechatronics integration for the trident fp7project,"in ieee/asme transactions on mechatronics,vol.20,no.5,pp.2583-2592,oct.2015,doi:10.1109/tmech.2015.2395413.公开了一种水下机器人机械手系统,该系统将七自由度的电动机械臂安装在水下机器人下方,虽然水下机器人也设计为适宜悬停的结构,但是这种结构极大增加了航行过程中的水阻力,牺牲了水下机器人长距离航行的能力。
6、专利文献cn108860527a公开了一种水下机器人水下机械臂系统,该系统将机械臂悬挂在auv下端,在auv长距离航行过程中,无法将机械臂收缩折叠入腔,增大了航行阻力。
技术实现思路
1、本发明的目的在于提供一种用于海底采样的回转体水下航行器,该航行器结构紧凑且符合流线型机身以减少航行阻力,以及解决了水下定点采样时航行器的平衡问题,从而提供海底样本采样的工作效率。
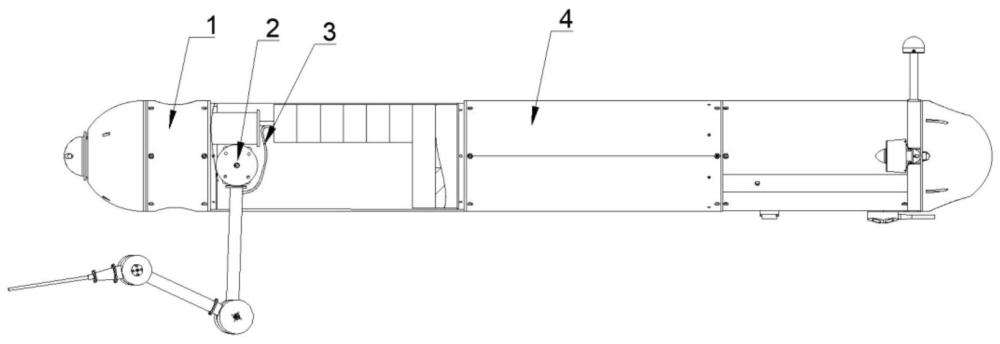
2、为了实现本发明的目的,提供了一种用于海底采样的回转体水下航行器,包括航行器本体;其中,所述航行器内设有采样腔,所述采样腔内设有能伸出采样腔外的多关节折叠机械臂,与多关节折叠机械臂配合使用的取样装置以及用于调节航行器在水下平衡的控制系统;
3、所述取样装置包括固定在采样腔内的取样筒组件和设置在所述多关节折叠机械臂伸出端的硬管取样头,以及用于将液体样本从硬管取样头输送至取样筒组件内的软管,所述折叠伸缩臂内设有软管通过的安装通道;
4、所述控制系统包括带动取样筒组件在采样腔内座做旋转和水平运动的质心调节装置和位姿采样单元,通过所述位姿采样单元获取折叠机械臂伸出采样腔后航行器的姿态信息,调节取样筒组件在采样腔内的姿态以平衡航行器的质心。
5、本发明通过设置内置式的多关节折叠机械臂,以保证航行器在航行过程外表面符合流线型机身以降低航行阻力,同时以取样组件作为质心重物并通过质心调节装置调节其位于采样腔内的相对位置,以消除在定点采样时因多关节折叠机械臂伸出过程中航行器整体浮心质心变化的影响,从而加快采样的工作效率。
6、具体的,所述多关节折叠机械臂包括设置在采样腔内壁上的的回转基座,固定在所述回转基座上且转动轴垂直设置的末端关节,与所述末端关节连接且同轴做回转运动的第一连接杆,所述第一连接杆的另一端通过设有转动方向与所述回转基座一致的中端关节,并通过所述中端关节连接有第二连接杆,所述第二连接杆的摆动平面与所述第一连接杆的摆动平面平行,所述第二连接杆的另一端设有转动方向与所述中端关节一致的前端关节,并通过所述前端关节连接硬管取样头。
7、具体的,所述多关节折叠机械臂与硬管取样头的连接处设有水体特征传感器,以采集液体样本的环境特征信息,所述水体特征传感器包括可以集成目标为采集海底热液高温流体的温度传感器,目标为采集富集浮游生物水体的水体溶解氧传感器,以及目标为检测水源环境的水体ph传感器,从而实现针对不同目标水体的溯源定点取样。
8、具体的,所述取样筒组件沿软管中液体样本流动方向依次设有吸水泵,多通阀以及取样筒,所述取样筒有多个,多个取样筒通过多通阀协调存储液体样本。
9、具体的,通过搭载在航行器本体中的电子罗盘进行实时姿态信息采集。
10、具体的,所述质心调节装置包括转动轴与航行器长度方向一致的旋转支架,带动旋转支架做旋转运动的滑环电机,以及带动旋转支架沿航行器方向做水平运动的丝杠推杆机构,所述取样筒组件设置于旋转支架内,所述旋转支架端部与滑环电机的外圈固定,所述滑环电机的内圈与丝杠推杆机构的推杆垂直布置。
11、具体的,所述采样腔带有排水系统,当折叠机械臂收回至采样腔内后通过所述排水系统将采样腔内的海水排净,以降低航行器的重量从而加快航行器的航行速度。
12、与现有技术相比,本发明的有益效果:
13、采用可折叠式的机械臂,在水下机器人航行过程中可收缩进回转型腔体中,保持水下机器人流线型外观,减少航行阻力;
14、硬软管结合的机械臂,机械臂末端设计为硬管,连杆中间穿插软管,可针对目标水体进行取样;
15、以取样组件作为质心重物并通过质心调节装置调节其位于采样腔内的相对位置,以消除在定点采样时因多关节折叠机械臂伸出过程中航行器整体浮心质心变化的影响,从而加快采样的工作效率。
技术特征:1.一种用于海底采样的回转体水下航行器,包括航行器本体,其特征在于,所述航行器内设有采样腔,所述采样腔内设有能伸出采样腔外的多关节折叠机械臂,与多关节折叠机械臂配合使用的取样装置以及用于调节航行器在水下平衡的控制系统;
2.根据权利要求1所述的用于海底采样的回转体水下航行器,其特征在于,所述多关节折叠机械臂包括设置在采样腔内壁上的的回转基座,固定在回转基座上且转动轴垂直设置的末端关节,与所述末端关节连接且同轴做回转运动的第一连接杆,所述第一连接杆的另一端通过设有转动方向与所述回转基座一致的中端关节,并通过所述中端关节连接有第二连接杆,所述第二连接杆的摆动平面与所述第一连接杆的摆动平面平行,所述第二连接杆的另一端设有转动方向与所述中端关节一致的前端关节,并通过所述前端关节连接硬管取样头。
3.根据权利要求1或2所述的用于海底采样的回转体水下航行器,其特征在于,所述多关节折叠机械臂与硬管取样头的连接处设有水体特征传感器,以采集液体样本的环境特征信息。
4.根据权利要求1所述的用于海底采样的回转体水下航行器,其特征在于,所述取样筒组件沿软管中液体样本流动方向依次设有吸水泵,多通阀以及取样筒,所述取样筒有多个,多个取样筒通过多通阀协调存储液体样本。
5.根据权利要求1所述的所述用于海底采样的回转体水下航行器,其特征在于,通过搭载在航行器本体中的电子罗盘进行实时姿态信息采集。
6.根据权利要求1或5所述的用于海底采样的回转体水下航行器,其特征在于,所述姿态信息包括航行器当前的俯仰角和横滚角。
7.根据权利要求1所述的用于海底采样的回转体水下航行器,其特征在于,所述质心调节装置包括转动轴与航行器长度方向一致的旋转支架,带动旋转支架做旋转运动的滑环电机,以及带动旋转支架沿航行器方向做水平运动的丝杠推杆机构,所述取样筒组件设置于旋转支架内,所述旋转支架端部与滑环电机的外圈固定,所述滑环电机的内圈与丝杠推杆机构的推杆垂直布置。
8.根据权利要求1所述的用于海底采样的回转体水下航行器,其特征在于,所述采样腔带有排水系统,当折叠机械臂收回至采样腔内后通过所述排水系统将采样腔内的海水排净。
技术总结本发明公开了一种用于海底采样的回转体水下航行器,包括航行器本体,所述航行器内设有采样腔,所述采样腔内设有能伸出采样腔外的多关节折叠机械臂,与多关节折叠机械臂配合使用的取样装置以及用于调节航行器在水下平衡的控制系统。本发明提供的装置结构紧凑且符合流线型机身以减少航行阻力,以及解决了水下定点采样时航行器的平衡问题,从而提供海底样本采样的工作效率。技术研发人员:吴世军,张文博,姜啸风,张健,王威奇,杨灿军受保护的技术使用者:浙江大学技术研发日:技术公布日:2024/5/19本文地址:https://www.jishuxx.com/zhuanli/20240722/224905.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表