一种全自动遥控式河道水面垃圾收集处理船的制作方法
- 国知局
- 2024-08-01 06:53:51
本发明涉及一种垃圾收集装置,尤其是一种全自动遥控式河道水面垃圾收集处理船,属于水面垃圾收集处理方法。
背景技术:
1、在对河道水面漂浮垃圾进行收集作业时,传统的方法都是由随船的操作工人用手工操作的网兜等捞取工具来捞取河面漂浮物、并转送到垃圾收集船上的收集舱内的。这种人工作业方式不仅劳动强度大、操作费力、而且工作效率低;同时在收集水上垃圾时,一般都是直接将垃圾打捞入船体内存放。由于垃圾形状不规则、大小不等、且含水份高,而船的存贮容量和承重能力有限,影响对水中漂浮垃圾收集的效率。
2、为了解决这一问题,随着技术的进步,在这一行业逐步出现了一些以机械化操作的河道垃圾收集船,使该行业逐渐进入机械化收集水面垃圾的发展阶段。
3、如中国专利文献公开的cn206606326u公开的垃圾收集船,通过设置在船体前部可倾斜状插入水面的收集装置,将船体行驶中收集到的水面垃圾通过输送装置、以及位于输送装置后部的平移装置将所收集到的水面垃圾放入船体的空舱之中,实现水面垃圾的收集。
4、此外,随着时代的发展和进步,还出现了一些无人操控的垃圾收集船。如中国专利文献公开的cn201604784u公开的水面漂浮垃圾收集船,除了在船体的两个浮体之间的前端设有前置挡板,在前置挡板的后端设有固定在船体两个浮体上的垃圾回收舱外,还在船体的前端设置配有信号发射装置的摄像头、以及带信号接收装置的显示器,使整个垃圾圾收集船能够在无人操控下自动完成对漂浮在水面上的垃圾的收集。
5、但是根据本技术人对相关技术的分析:目前已经被推广使用的各类水面垃圾收集船,虽然通过各种机械设计以及自动化、智能化方案实施,让使用者可以从繁重的体力劳动中得以解脱,但是依然存在以下一些问题尚未得到有效解决:
6、一、由于船体的垃圾装载量有限,仅仅解决了使垃圾集中收集到船体的垃圾收集舱内,但是尚未能及时处理这些垃圾中含有的大量水体,由于装载量有限,导致其无法维持较长时间的清除水面垃圾处理。
7、二、目前已经采用的远程控制能力过于简单也十分有限,也是需要进一步完善的必要。
8、因此,需要提供一种全自动收集处理河面漂浮物的垃圾收集船,不仅可以根据既定的要求将漂浮在水中的各种垃圾及时收集到船体上,同时还能够及时将收集到的垃圾进行粉碎、压缩处理,不仅保持自动化全面清理河面漂浮物,而且还能够提高其装载量及方便后期垃圾处理效能的目的。
技术实现思路
1、本发明的目的:旨在提供一种借助于gps定位和激光雷达操控、并由岸上工作人员操纵人员通过操控中心来实现:既能完成船舶的行驶、垃圾收集,同时又能同步对捞上船内的垃圾及时进行压缩去除水分的工作。既达到节省人工建强劳动强度,同时又能避免由于垃圾形状不规则、体积大且含水份高,而船的存贮容量和承重能力有限,影响了收集垃圾的效率的缺陷。
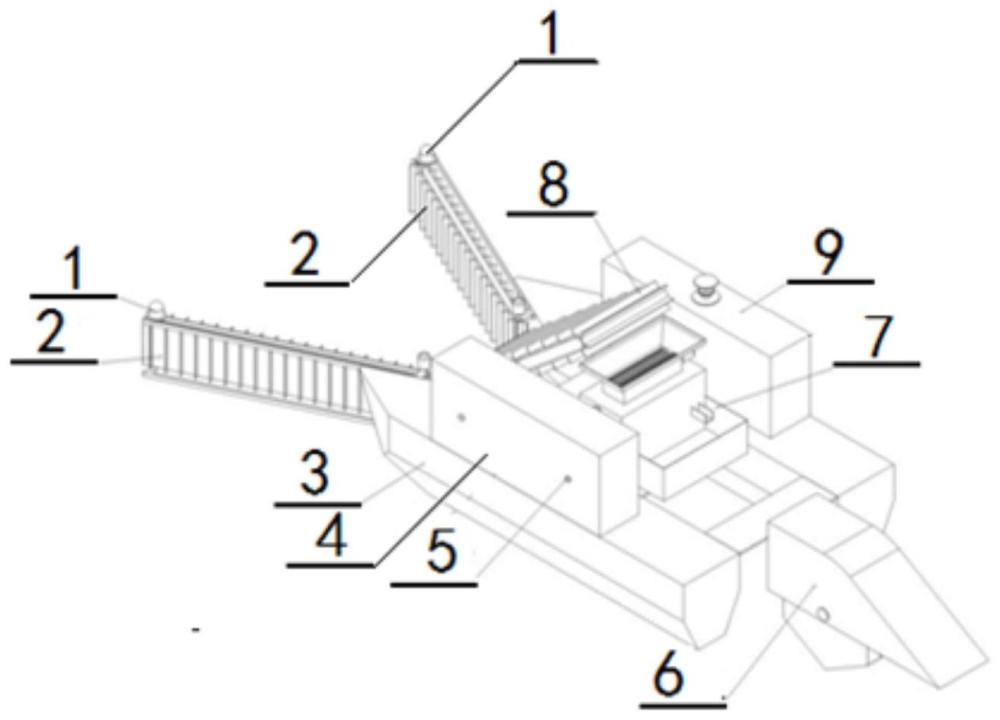
2、这种全自动遥控式河道水面垃圾收集处理船,包括船体3、设置在船体3上的垃圾收集输送装置、粉碎处理装置7、船体推进装置6、控制系统、供电装置9和定位装置,所述的垃圾收集输送装置由分设在船体头部左、右分设的一组呈外八字型张开的一组收集输送机构2、以及夹持并衔接在该八字型收集输送机构2后部的一向上倾斜设置的汇集输送机构8组成;所述的粉碎处理装置7设置在船体3上部沿船体中轴线位置、且紧挨着汇集输送机构8末端下方设置;所述的粉碎处理装置7由设置在船体上部的漏斗粉碎机构和置于漏斗粉碎机构下部的挤压成块机构组合而成;所述的船体推进装置6设置在船体3后部的中轴线上;所述的供电装置9设在位于船体3上部粉碎处理装置7的一侧;所述的定位装置由两组激光雷达组成。
3、进一步地,所述的收集输送机构2设在分离式船体的左右两分体船头之间,并与水面呈垂直设置;所述的每一组收集输送机构2由基座2.1、分设在基座前后两端的主驱动转轴2.3、转动轴2.9,环形输送带2.6、四个轴承座2.2、以及减速电机a 2.4组成;所述的环形输送带2.6环绕在主驱动转轴2.3和转动轴2.9上,并通过设置在主驱动转轴2.3一端的减速电机a 2.4构成环形输送带的驱动结构,并在所述环形输送带2.6带面上设置着按照间距分隔设置的垂直于带面的若干防滑挡板2.7;同时在所述的环形输送带2.6的两侧边部设有分段的边缘挡板2.8;并在设置着转动轴2.9的一轴承座2.2上设有一前激光雷达1。
4、进一步地,所述的汇集输送机构8由输送基座8.1、分设在输送基座前后两端安置着驱动转轴8.3、输送转动轴8.9、四个输送轴承座8.2、环形输送带8.6、以及与驱动转轴连接的减速电机b 8.4组成;所述的环形输送带8.6环绕在驱动转轴8.3和输送转动轴8.9上,并通过设置在驱动转轴8.3一端的减速电机b 8.4构成环形输送带的驱动结构,并在所述环形输送带8.6带面上设置着按照间距分隔设置的垂直于带面的防滑挡板8.7;同时在所述的环形输送带8.6的两侧边部设有分段的边缘挡板8.8。
5、进一步地,所述的漏斗粉碎机构由矩形漏斗舱7.1和位于该矩形漏斗舱7.1内的一组互为配合的辊型切刀7.2组成,该组辊型切刀7.2各由一设置在矩形漏斗舱7.1一侧舱体外的减速电机d 7.3驱动。
6、进一步地,所述的挤压成块机构由设置在漏斗粉碎机构下部设有漏斗安置槽7.6的挤压去水成型舱7.7、设置在挤成型水舱7.7两相邻舱板外的减速电机e 7.4和减速电机f7.5,以及分别设置在减速电机e 7.4和减速电机f 7.5输出轴端的螺旋推杆机构7.9组成;同时,其中一组螺旋推杆机构7.9正对着挤压去水成型舱7.7另一侧内舱壁,另外一组螺旋推杆机构7.9正对着挤压去水成型舱边部的去水后成型后的成型干垃圾排料口7.11。
7、进一步地,所述的螺旋推杆机构7.9由分别与两减速电机e 7.4、减速电机f 7.5输出轴固接的螺旋外套管7.91、以及设置在螺旋外套管内的一根螺旋内推杆7.93组成,所述的螺旋内推杆7.93的末端与一压板7.92固接,所述的螺旋外套管7.91内壁上设有螺旋型凹槽7.95,螺旋内推杆7.93上设有与螺旋型凹槽相配合的螺旋外螺纹7.94,由此构成由减速电机正、反转驱动操控的、既可向前挤压、退后回收的挤压式螺旋推杆机构。
8、进一步地,所述的成型干垃圾排料口7.11下部的挤压去水成型舱7.7一侧舱边另设有一用于接收成型干垃圾排料口7.11下落垃圾的垃圾贮存框7.15,所述的该垃圾贮存框7.15的底部设有排水孔7.14。
9、进一步地,所述的船体3由左、右两个独立的分船体组成,左、右两分船体由数块横向连接的船甲板3.1连接呈一体,并且左船体和右船体间隔一定间距。
10、进一步地,所述的船体推进装置6由减速电机c 6.3、双叶水轮6.2、外罩6.1构成,所述的减速电机c 6.3安置在一端与外罩固定的电机安装板6.5上,所述的双叶水轮6.2通过转轴6.4安置在所述的外罩6内、并通过转轴的一端与减速电机c 6.3输出轴一端相连。
11、进一步地,所述的控制系统包括船上控制系统4和设置在岸上的岸上控制系统b;所述的船上控制系统4设置在与供电装置9相对应的船体上部粉碎处理装置的另一侧;它包括:由四个激光雷达组成的定位装置、以及设置在船上的gps通信模块4.5、数据处理模块4.6、电源模块9以及分别控制收集装置的传动带控制模块4.9、控制粉碎处理装置的粉碎压块机控制模块4.8、控制推进机构的推进器控制模块4.7;所述的岸上控制系统b由市用的无线通信系统b1和岸上控制设备b2组成。
12、进一步地,所述的定位装置由分设在呈喇叭开口状分设在分离式船体的左、右两分体船头之间的两收集输送机构2前端上的前激光雷达1和船体中部左右分设的船上控制系统4和供电系统9外的各一个后激光雷达5组成。
13、进一步地,所述的船上控制系统4中的蓄电池9.1通过开关控制器4.2与电源模块4.3电连接、并通过电源模块4.3分别与前激光雷达1、后激光雷达5、船上的无线电通信系统4.1、导航仪4.4、gps通信模块4.5、数据处理模块4.6电连接形成一个供电闭合回路;同时,所述的电源模块4.3又同时分别与推进机构6和粉碎压块控制模块4.8、粉碎处理装置7构成另一个供电闭合回路;此外,所述的数据处理模块4.6的输出端分别与传动带控制模块4.9、粉碎压块机控制模块4.8、推进器控制模块4.7电连接;并分别通过传动带控制模块4.9、粉碎压块机控制模块4.8、推进器控制模块4.7的输出端分别与对应的收集输送机构2中驱动环形输送带2.6、汇集输送机构8中驱动环形输送带8.6、以及粉碎处理装置7中的多个减速电机、以及推进机构6中的减速电机分别电连接。
14、所述的这种全自动遥控式河道水面垃圾收集处理船的收集处理水面垃圾的步骤如下:
15、1)垃圾船根据岸上控制指令达到作业区域后,岸上控制系统把已设定好的参数发送工作指令;
16、2)船上的船上控制系统4在接收到开始工作的指令后便进入循环启动阶段,通过两组激光雷达发射的电磁波把船体周围的信息数据传递到数据采集器到,由数据处理模块4.6进行数据分析,无人收集船的航向角、经纬度、速度、方向、时间等信息经gps通信模块4.5进行接收,并通过串接口发送给数据处理模块,由数据处理模块4.6对接收的信息进行计算解析;
17、3)然后又通过串接口将解析到的位置姿态、速度等信息通过无线串口发送给岸上控制系统b;岸上控制系统根据接收到的航行状态信息,设定的航行任务和设定的控制算法完成控制参数的解算,并将控制参数换算成控制指令再次发送给船上的控制系统;
18、4)船上控制系统4将接收到的控制指令转换成电机控制信号输出,控制船体推进装置6中的减速电机c 6.3运转,驱动船体3航行;同时驱动安装在船体3船头左、右两侧的收集输送机构2进入工作状态,使该收集输送机构2中的两台减速电机a 2.4运转,通过带动该收集输送机构2中的环形输送带2.6进入工作状态,把汇集到左、右两收集输送机构2之间的水面垃圾传送至两收集输送机构2后部的汇集输送机构8的下端;随着汇集输送机构8的启动,在该汇集输送机构8中的减速电机b 8.4的驱动下,随着该汇集输送机构8中减速电机b8.4转动,该机构中的环形传送带8.6将位于汇集输送机构8下部由左、右两收集输送机构2送达的水面垃圾经汇集输送机构8的作用下把垃圾传送到传送带上端;直到垃圾落入位于该汇集输送机构8环形传送带8.6下部组成粉碎处理装置7中的矩形漏斗舱7.1内;进入粉碎处理装置7矩形漏斗舱7.1内的水面垃圾,经设置在矩形漏斗舱7.1内的一组由两个减速电机d 7.3驱动的辊型切刀7.2的相对旋转把垃圾粉碎;然后已粉碎的垃圾向下落入位于粉碎处理装置7下部的密闭压块装置中的挤压去水舱7.7,经设置在挤压去水成型舱7.7一侧舱体外的减速电机e 7.4的作用下,带动设置于该减速电机e 7.4输出轴端的螺旋推杆机构7.9向前推向对面一侧的舱体内壁,达到挤掉垃圾中的水份形成压实垃圾块;该压实后的垃圾块体经设置在相邻一侧舱体外的另一减速电机f 7.5及设于该减速电机f 7.5输出轴端驱动的螺旋推杆机构7.9向前推进的作用下,把已压实垃圾块向成型干垃圾出口7.11方向运动、直到把压实垃圾块推出排料口落入垃圾贮存框7.15;随后推压、推出后的两组螺旋推杆机构7.9均回到原来起始位置、进入下一垃圾收集粉碎压块过程。
19、根据以上技术方案提出的这种全自动遥控式河道水面垃圾收集处理船,与目前普遍使用的普通型水面垃圾收集船相比较,具有以下几大特点:
20、1)整个垃圾收集处理的操作实现了无人自动化运行,使操作者能够全面地从繁重的体力劳动中解放出来;
21、2)使垃圾在从水面收集起来以后可以直接经粉碎、挤压处理成压缩型块体;大大缩小了收集垃圾的占有体积,大大提高该处理船的运行效果。
本文地址:https://www.jishuxx.com/zhuanli/20240722/225387.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表