一种多模式隧洞水下作业机器人的制作方法
- 国知局
- 2024-08-01 06:55:37
本发明涉及一种引水隧洞探测工具,尤其是涉及一种多模式隧洞作业水下机器人。
背景技术:
1、目前,为保证城市用水和各类生产用水的稳定供水,引水隧洞在各种水利工程中占有很大份额,但引水隧洞一直处于水下,一直承受水压和水体的侵蚀,同时伴随地质条件的变化,洞壁难免会出现裂纹、裂缝等情况,如果不能发现并及时修复,很可能会导致隧洞坍塌,不仅影响引水功能,造成财力物力的损失,甚至会威胁隧洞中作业人员的生命安全。
2、现有的通常做法是进行断水后将引水隧洞排空,派遣人工进入隧洞检查,但是人工方法作业环境严峻,容易发生危险;耗时长,效率低,不适合超长隧洞的检测;且突然断水排水会使隧洞长期受到的水压消失,导致隧洞内的应力场发生变化;同时断水排水会影响一定时间的供水。还有一种方式就是通过水下机器人对洞壁进行检测,但为完成长距离的跨区域调水,有些引水隧洞很长。而现有的水下机器人供电方式单一,仅采用电池供电,其储存的电量难以支持机器人完成隧洞全程的检测;而采用电缆供电虽动力充足,可以很好地支持设备运行,但受电缆长度的限制,且对于超长隧洞,过长的电缆会产生极大的功率损耗。
3、经过检索,申请公布号cn113650763a公开了一种输水隧洞检测机器人及其控制方法,具体公开了:包括:载体系统,用于承载动力设备及探测设备;主控系统,用于操控机器人在隧洞内作业;能源系统,为水下机器人作业提供能源;推进与操纵系统,首尾各布置4台纵向推进器,实现机器人基础运动;通信系统,利用无线局域网实现数据上传与指令下载;导航与定位系统,利用首尾交叉分布的4个测距仪,实现机器人在隧洞横截面内的定位;任务系统,实现对周向洞壁观测录像,回收后进行数据处理。
4、但该现有技术通过能源系统即锂电池供电,续航能力有限,因此,如何设计一种能耗较低的水下作业机器人为需要解决的技术问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的续航能力有限的缺陷而提供一种多模式隧洞水下作业机器人。
2、本发明的目的可以通过以下技术方案来实现:
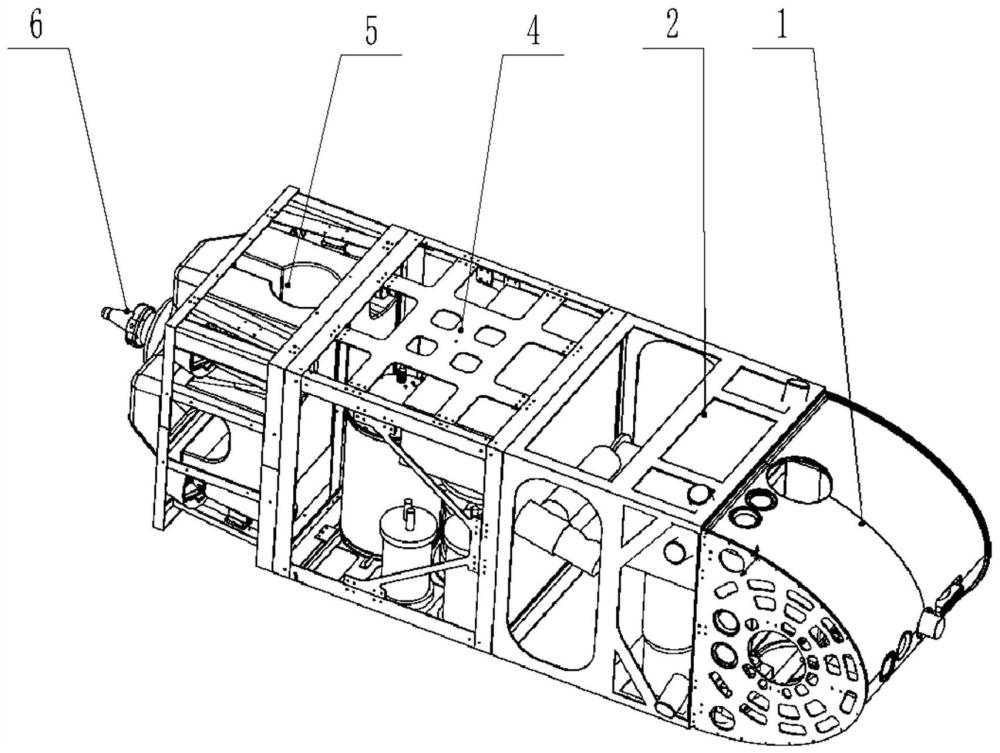
3、根据本发明的一个方面,提供了一种多模式隧洞水下作业机器人,该机器人工作模式包括遥控潜水模式和自主水下航行模式;当处于遥控潜水模式时,该机器人包括依次可拆卸连接的观通段、作业段、控制段和尾部推进段,当处于自主水下航行模式时,该机器人还包括电池段,所述电池段安装在作业段和控制段之间;所述观通段整体为流线型,采集隧洞数据;所述作业段包括可收放工作臂;所述控制段切换机器人的工作模式;所述尾部推进段上设有尾端推进器和光电复合缆接头,所述光电复合缆接头接设线缆。
4、作为优选的技术方案,所述的观通段包括降阻导流罩、安装在降阻导流罩上的声呐以及安装在降阻导流罩内的灯光摄像设备和首端推进器,所述的降阻导流罩为流线型;所述作业段、电池段、控制段和尾部推进段的横截面均小于或等于降阻导流罩的最大横截面。
5、作为优选的技术方案,所述的声呐包括声像声呐和隧洞声呐;所述的首端推进器包括首端侧向推进器和首端垂直推进器。
6、作为优选的技术方案,所述的作业段内还包括冲洗泵、打磨设备和灯光摄像设备,所述工作臂末端安装有冲洗喷头,所述冲洗喷头收起时位于作业段内部,所述冲洗泵和冲洗喷头连接。
7、作为优选的技术方案,所述的电池段包括水下电池包、电池配平浮力包和安装板;所述电池包为观通段、作业段、控制段和尾部推进段供电;所述电池配平浮力包所提供的浮力使电池段所受合力为零;所述安装板与作业段连接的一端与控制段与电池段连接的一端结构相同。
8、作为优选的技术方案,所述的电池段还包括存储模块,所述存储模块存储自主水下航行模式的预设行进路线和采集到的数据。
9、作为优选的技术方案,所述的控制段包括高低压转换单元、配电单元和控制单元;所述高低压转换单元在遥控潜水模式和自主水下航行模式分别切换为电池段供电和线缆供电,所述控制单元分别与观通段、作业段和尾部推进段通信连接。
10、作为优选的技术方案,所述的尾部推进段还包括导流外壳,所述导流外壳为流线型,所述尾端推进器安装在导流外壳内,所述光电复合缆接头安装在导流外壳上。
11、作为优选的技术方案,所述的尾端推进器包括尾端主推进器和尾端侧向推进器。
12、作为优选的技术方案,所述的尾端主推进器为四个导管推进器,分别对称安装在导流外壳的四角,其方向不平行于机器人整体延伸方向。
13、与现有技术相比,本发明具有以下有益效果:
14、1)本发明电池段可拆卸,实现了机器人遥控潜水模式和自主水下航行模式的切换,遥控潜水模式无电池段可减少机器人负载降低能耗,既解决了超长隧洞检测时自主水下航行模式动力不足的问题,又避免了遥控潜水模式在行进过深时线缆导致运动受限以及电缆造成过大能耗的问题;作业段位于机器人中部,能够减小水下的阻力,适合长隧洞作业;作业段工作臂可收放,行进时可回收至机身内部减小阻力,观通段整体为流线型,均可降低能耗;
15、2)本发明作业段、电池段、控制段和尾部推进段的横截面均小于或等于降阻导流罩的最大横截面,则各段在机器人行走过程中不产生附体阻力;
16、3)本发明安装板与作业段连接的一端与控制段与电池段连接的一端结构相同,且通过电池配平浮力包保持电池段所受合力为零状态,全段的拆卸或安装对机器人的横倾、纵倾等没有影响,因此电池段拆卸后可便捷地将作业段和控制段连接;
17、4)本发明控制段可在自主水下航行模式下自动切换高压供电回路,转化为电缆供电;在遥控潜水模式下可将远程高压换为与电池供电接口相同的低压电源;两种模式下配电单元和控制单元保持不变,使用相同配电单元和控制单元以实现兼容;
18、5)本发明用于作业的工具和设备均位于作业段内部,机器人行走时不产生附体阻力;工作臂末端安装有冲洗喷头,需作业时机器人可以进行水下大功率高压空化射流喷冲作业,实现对洞壁淡水壳菜的清理;
19、6)本发明尾端主推进器对称安装在导流外壳的四角,受力点是对称点,使机器人运动平稳,其方向与机器人整体延伸方向呈一定角度,以减少水流的反作用力阻挡;观通段的推进器与尾端推进器联动调整机器人的移动和方向角,使机器人运动更加灵活;
20、7)本发明灯光摄像设备、声像声呐和隧洞声呐,可以环形观察整个隧洞内壁,也可以实现机器人在浑浊水环境下的环境探测。
技术特征:1.一种多模式隧洞水下作业机器人,其特征在于,该机器人工作模式包括遥控潜水模式和自主水下航行模式;当处于遥控潜水模式时,该机器人包括依次可拆卸连接的观通段(1)、作业段(2)、控制段(4)和尾部推进段(5),当处于自主水下航行模式时,该机器人还包括电池段(3),所述电池段(3)安装在作业段(2)和控制段(4)之间;所述观通段(1)整体为流线型,采集隧洞数据;所述作业段(2)包括可收放工作臂;所述控制段(4)切换机器人的工作模式;所述尾部推进段(5)上设有尾端推进器和光电复合缆接头(6),所述光电复合缆接头(6)接设线缆。
2.根据权利要求1所述的一种多模式隧洞水下作业机器人,其特征在于,所述的观通段(1)包括降阻导流罩(7)、安装在降阻导流罩(7)上的声呐以及安装在降阻导流罩(7)内的灯光摄像设备(8)和首端推进器,所述的降阻导流罩(7)为流线型;所述作业段(2)、电池段(3)、控制段(4)和尾部推进段(5)的横截面均小于或等于降阻导流罩(7)的最大横截面。
3.根据权利要求2所述的一种多模式隧洞水下作业机器人,其特征在于,所述的声呐包括声像声呐和隧洞声呐(10);所述的首端推进器包括首端侧向推进器(11)和首端垂直推进器(12)。
4.根据权利要求1所述的一种多模式隧洞水下作业机器人,其特征在于,所述的作业段内还包括冲洗泵、打磨设备和灯光摄像设备(8),所述工作臂末端安装有冲洗喷头,所述冲洗喷头收起时位于作业段内部,所述冲洗泵和冲洗喷头连接。
5.根据权利要求1所述的一种多模式隧洞水下作业机器人,其特征在于,所述的电池段(3)包括水下电池包(13)、电池配平浮力包(14)和安装板(15);所述电池包为观通段(1)、作业段(2)、控制段(4)和尾部推进段(5)供电;所述电池配平浮力包(14)所提供的浮力使电池段(3)所受合力为零;所述安装板(15)与作业段(2)连接的一端与控制段(4)与电池段(3)连接的一端结构相同。
6.根据权利要求5所述的一种多模式隧洞水下作业机器人,其特征在于,所述的电池段(3)还包括存储模块,所述存储模块存储自主水下航行模式的预设行进路线和采集到的数据。
7.根据权利要求1所述的一种多模式隧洞水下作业机器人,其特征在于,所述的控制段(4)包括高低压转换单元(16)、配电单元(17)和控制单元(18);所述高低压转换单元(16)在遥控潜水模式和自主水下航行模式分别切换为电池段(3)供电和线缆供电,所述控制单元(18)分别与观通段(1)、作业段(2)和尾部推进段(5)通信连接。
8.根据权利要求1所述的一种多模式隧洞水下作业机器人,其特征在于,所述的尾部推进段(5)还包括导流外壳(21),所述导流外壳(21)为流线型,所述尾端推进器安装在导流外壳(21)内,所述光电复合缆接头(6)安装在导流外壳(21)上。
9.根据权利要求1所述的一种多模式隧洞水下作业机器人,其特征在于,所述的尾端推进器包括尾端主推进器(19)和尾端侧向推进器(20)。
10.根据权利要求9所述的一种多模式隧洞水下作业机器人,其特征在于,所述的尾端主推进器(19)为四个导管推进器,分别对称安装在导流外壳(21)的四角,其方向不平行于机器人整体延伸方向。
技术总结本发明涉及一种多模式隧洞水下作业机器人,工作模式包括遥控潜水模式和自主水下航行模式;当处于遥控潜水模式时,该机器人包括依次可拆卸连接的观通段、作业段、控制段和尾部推进段,当处于自主水下航行模式时,还包括电池段;观通段整体为流线型,采集隧洞数据;作业段包括可收放工作臂;控制段切换机器人的工作模式;尾部推进段上设有尾端推进器和光电复合缆接头。与现有技术相比,本发明具有电池段可拆卸,实现了机器人遥控潜水模式和自主水下航行模式的切换,遥控潜水模式无电池段减少了机器人负载降低能耗;作业段的可收放工作臂,行进时可回收至机身内部减小阻力,观通段整体为流线型,降低了能耗等优点。技术研发人员:杨建喜,付仪宁,胡勇,严振瑞,马龙,钟雅卉,苗中华受保护的技术使用者:广东粤海珠三角供水有限公司技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/225512.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表