一种多关节柔性水下探测机械臂及其水下机器人
- 国知局
- 2024-08-01 06:55:34
本发明涉及水下机械臂,特别是涉及一种多关节柔性水下探测机械臂及其水下机器人。
背景技术:
1、海洋蕴藏着丰富的生物、矿产、石油、天然气等资源,具有极高的探索价值。遥控式水下机器人(remotely operated underwater vehicle,简称rov)安全、高效、活动范围大、机动性好、可以全天候工作,是当前开发海洋资源和认识海洋的重要工具之一。rov本身仅是一种运载工具,如果要进行具体水下作业,就需要安装水下作业工具,主要包括机械臂以及安装在机械臂上面的末端执行工具。因此,具有不同功能的水下机械臂相继被研发出来用于水下任务中。
2、传统的刚性水下机械臂的设计通常采用刚性关节与连杆机构,这种机械臂具有运动精确的优点,但传动效率低,转动惯量大,且自由度数有限,灵活性不高,没法满足水下机械臂在在一系列狭小、受限、非结构化的空间内灵活运动,例如沉船,珊瑚礁等。与刚性机械臂相比较,多关节柔性水下机械臂优势在于其柔性好、质量小、冗余自由度多、灵活性、连续变形能力以及避障性远远强于传统的工业机械臂,例如蛇形机器人、仿象鼻机械臂等,可以满足灵活运动的要求,适应复杂、狭小工作环境,因此在复杂海洋探测研究中更有着很多潜在的优点。而现有市面上的水下探测rov大多数在使用时,传统的刚性水下机械臂由于其尺寸结构以及自由度的限制,不能够灵活的调节机械臂的方向,而目前有的多关节柔性水下机械臂其旋转的角度受限,没有办法多方位旋转,而在这样的情况下,rov进行多方位转动和调节位置,很容易损坏rov搭载的机械臂或损伤到rov本身,或在探测的过程中出现意外无法运行,达不到工作的最佳效果。
3、因此,亟需一种多关节柔性水下探测机械臂及其水下机器人来解决上述问题。
技术实现思路
1、本发明的目的是提供一种多关节柔性水下探测机械臂及其水下机器人,以解决现有技术存在的问题,相较于典型的6自由度+摄像头/手爪的结构,其结构设计巧妙,具有结构轻巧、质量小以及冗余自由度大的优点,在水下有较高的机动性,可以连续长时间作业,能够较好地实现对水下管道等狭小空间的视频探测,管道检修等,在民用和军用两方面都有很大的应用潜力。
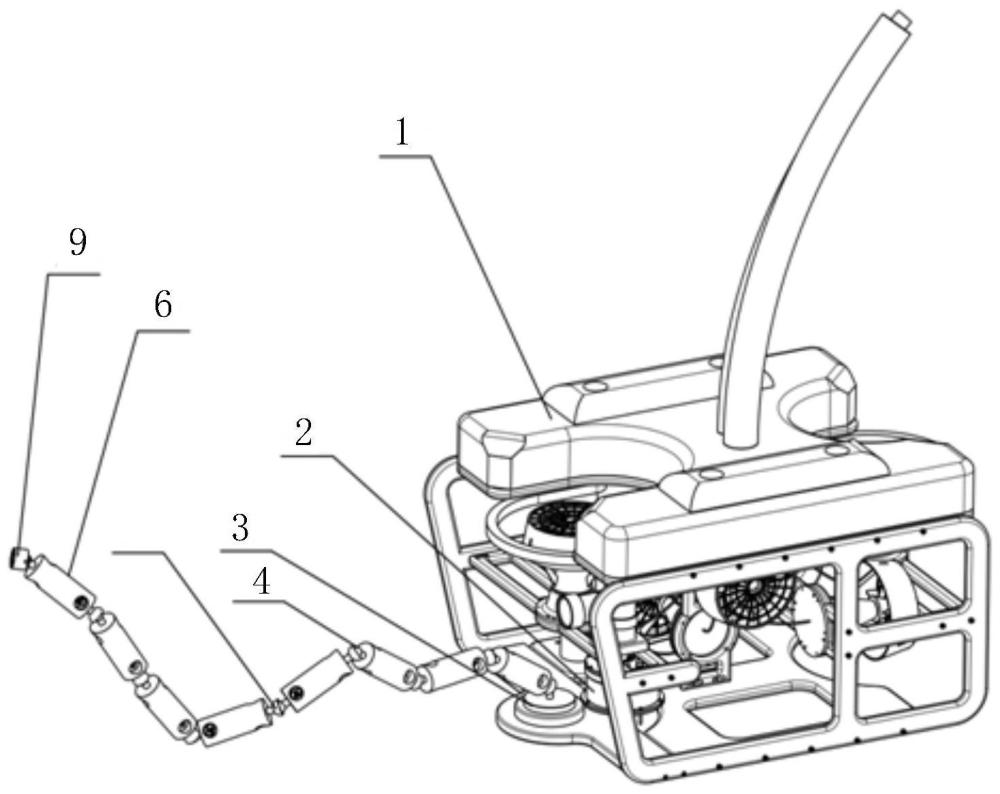
2、为实现上述目的,本发明提供了如下方案:本发明提供一种多关节柔性水下探测机械臂,包括:
3、连接底座;
4、机械臂机构,所述机械臂机构包括若干个机械臂关节筒,相邻所述机械臂关节筒之间采用万向节连接,首端的所述机械臂关节筒通过万向节与所述连接底座连接;
5、驱动结构,一所述机械臂关节筒上安装有推进件ⅰ和推进件ⅱ,且所述推进件ⅰ和推进件ⅱ垂直设置,启动所述推进件ⅰ和推进件ⅱ可以带动所述机械臂机构多姿态运动;
6、终端结构,所述终端结构通过万向节与末端的所述机械臂关节筒可拆卸连接,所述终端结构为机械臂末端执行工具,所述机械臂末端执行工具可以依据不同工况进行更换。
7、优选的,所述万向节包括球座和球头;
8、一所述机械臂关节筒的两侧分别固定安装有球座和球头,相邻所述机械臂关节筒之间的球座和球头相适配;
9、所述连接底座上安装有球头,连接时,所述球头与首端的所述机械臂关节筒的球座相适配;
10、所述终端结构上安装有球座,连接时,所述球座与末端的所述机械臂关节筒的球头相适配。
11、优选的,相邻所述机械臂关节筒之间的所述万向节外包覆有柔性防护套,所述柔性防护套的两端分别与相邻所述机械臂关节筒固定连接。
12、优选的,所述机械臂关节筒的材质为浮力材料。
13、优选的,所述推进件ⅰ为对称安装在所述机械臂关节筒上的前推进器,所述推进件ⅱ为对称安装在所述机械臂关节筒上的后推进器。
14、优选的,所述机械臂末端执行工具为摄像头、抓手和采样器中任意一种。
15、优选的,所述终端结构上固定安装有末端传感器。
16、优选的,所述柔性防护套为波纹管。
17、为实现上述目的,本发明还提供了如下方案:本发明还提供一种水下机器人,包括:
18、rov运载本体,
19、控制单元,所述控制单元固定安装在所述rov运载本体上;
20、上述所述的多关节柔性水下探测机械臂,所述控制单元分别与所述连接底座、驱动结构和终端结构电性连接。
21、本发明公开了以下技术效果:本发明公开的多关节柔性水下探测机械臂及其水下机械人,通过采用万向节结构将多个机械臂机构进行连接,这样可以实现三维空间里的任意转动;再者,配合驱动结构的使用,可以保证机械臂机构可以在三维空间内的移动,同时,终端结构采用可拆卸安装的形式可以使其进行不同的水下作业;而整个多关节柔性水下探测机械臂相较于典型的6自由度+摄像头/手爪的结构,其结构设计巧妙,具有结构轻巧、质量小以及冗余自由度大的优点,在水下有较高的机动性,可以连续长时间作业,能够较好地实现对水下管道等狭小空间的视频探测,管道检修等,在民用和军用两方面都有很大的应用潜力。
技术特征:1.一种多关节柔性水下探测机械臂,其特征在于,包括:
2.根据权利要求1所述的多关节柔性水下探测机械臂,其特征在于:所述万向节(4)包括球座(41)和球头(42);
3.根据权利要求1所述的多关节柔性水下探测机械臂,其特征在于:相邻所述机械臂关节筒(6)之间的所述万向节(4)外包覆有柔性防护套,所述柔性防护套的两端分别与相邻所述机械臂关节筒(6)固定连接。
4.根据权利要求1-3所述的多关节柔性水下探测机械臂,其特征在于:所述机械臂关节筒(6)的材质为浮力材料。
5.根据权利要求1所述的多关节柔性水下探测机械臂,其特征在于:所述推进件ⅰ为对称安装在所述机械臂关节筒(6)上的前推进器(7),所述推进件ⅱ为对称安装在所述机械臂关节筒(6)上的后推进器(8)。
6.根据权利要求1所述的多关节柔性水下探测机械臂,其特征在于:所述机械臂末端执行工具为摄像头(9)、抓手(11)和采样器(12)中任意一种。
7.根据权利要求6所述的一种水质检测设备,其特征在于:所述终端结构上固定安装有末端传感器(10)。
8.根据权利要求1所述的一种水质检测设备,其特征在于:所述柔性防护套为波纹管(5)。
9.一种水下机器人,其特征在于,包括:
技术总结本发明涉及水下机械臂技术领域,特别是涉及一种多关节柔性水下探测机械臂及其水下机器人,包括:连接底座;机械臂机构,机械臂机构包括若干个机械臂关节筒,相邻机械臂关节筒之间采用万向节连接,首端的机械臂关节筒通过万向节与连接底座连接;驱动结构,一机械臂关节筒上安装有推进件Ⅰ和推进件Ⅱ,推进件Ⅰ和推进件Ⅱ垂直设置;终端结构,终端结构通过万向节与末端的机械臂关节筒可拆卸连接。本发明公开的多关节柔性水下探测机械臂其结构设计巧妙,具有结构轻巧、质量小以及冗余自由度大的优点,在水下有较高的机动性,可以连续长时间作业,能够较好地实现对水下管道等狭小空间的视频探测,管道检修等,在民用和军用两方面都有很大的应用潜力。技术研发人员:庞文,朱大奇,陈倩,周万雷,张乐峰,陈琦,郭经纬,徐佳俊,郭树轩受保护的技术使用者:上海理工大学技术研发日:技术公布日:2024/6/5本文地址:https://www.jishuxx.com/zhuanli/20240722/225509.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表