一种利用机械结构调节平衡的水下机器人
- 国知局
- 2024-08-01 07:14:38
本技术涉及水下机器人,具体涉及了一种利用机械结构调节平衡的水下机器人。
背景技术:
1、水下机器人是一种用于在水下环境中执行特定任务的机器人。它通过搭载各种传感器和执行机构,能够在无人潜水或远程操作的情况下完成各种任务,如搜寻救援、海洋科学研究、海底资源勘探等。在水下环境中,机器人面临定位和导航的复杂性。由于水下环境的多变性和狭隘性,通过软件程序来控制机器人的平衡较为困难,因此利用可调的机械结构让水下机器人能够在不同环境中保持平衡成为我们追求的目标。
技术实现思路
1、本实用新型的主要目的是提供一种利用机械结构调节平衡的水下机器人设计方案,主要探测水下管道是否破损和堵塞,并且通过调整机械结构轻微移动水下推进器,稳定重心以应对不同的水下环境下的复杂管道,一定程度上保障了工作人员的安全并提高了工作效率。
2、为实现上述目的,本实用新型采用的技术方案是:本实用新型涉及一种利用机械结构调节平衡的水下机器人,所述水下机器人装置包括舱体、后端盖、半球罩、水下推进器、平衡电机支架、侧面电机支架、主体基座、手柄。所述舱体和主体基座进行嵌套连接;所述平衡电机支架和侧面电机支架通过六角头螺栓、六角螺母紧固于主体基座侧面两端与四周;所述半球罩通过六角头螺栓、六角螺母连接于舱体的前端,且半球罩内部可放置镜头用于探查管道情况;所述后端盖通过六角头螺栓、六角螺母紧固于舱体的后端,后端盖上的孔位用来固定通孔螺钉,预留电子线路;所述手柄通过六角头螺栓、六角螺母紧固于主体基座上侧;所述水下推进器通过六角头螺栓、六角螺母紧固于侧面电机支架两端和四个平衡电机支架上。
3、进一步的,所述半球罩法兰侧有一个配套的圆形挡板,用来固定水下机器人上携带的镜头。
4、进一步的,所述主体基座、舱体、侧面电机支架、平衡电机支架、手柄上的孔位均是螺纹孔,为了便于六角头螺栓、六角螺母的使用。
5、进一步的, 4个垂直水下推进器,相邻设置的两个垂直水下推进器螺旋桨旋转方向相反,为了互相抵消反扭力,进而实现运行时整体的平衡。
6、进一步的,所述侧面电机支架上具有多列等距的孔位,通过改变水下推进器固定在侧面电机支架上的位置,可以让其水下推进器在侧面电机支架上前移或后退一段距离,从而可以微调水下机器人在水中的平衡。
7、进一步的,所述主体基座两侧都具有弧形凹槽,通过在主体基座上挖弧形凹槽来减少水下机器人的重量。
8、进一步的,所述主体基座两侧有不同位置的孔位,可根据环境的要求自行调整平衡电机支架和侧面电机支架的位置,使重心微调,以保证水下机器人在不同水下环境下的平衡性。
9、进一步地,通过拧松连接主体基座与主体基座之间的螺钉,可以让主体基座、侧面电机支架、平衡电机支架一起在舱体上前移或后移一段距离,进行较大程度的调节水下机器人的平衡。
10、本实用新型的有益效果:
11、本实用新型的水下机器人,具有结构简单、操作方便、便于调节的特点。可以有效地够执行精确的测量和操作任务。可以有效减轻水下管道作业的困难度,减少工时的消耗,以及减小对操作人员的伤害。它们能够实时监测管道的各种参数,包括温度、压力、流量等,并进行准确的控制和调整,从而保证工作的准确性和高效性,提高了设备使用时的安全性的同时,具有较好的推广价值
12、附图说明
13、为了更清楚地说明本实用新型的技术实施方案及其实施例,下面将对本实用新型中的部分连接关系和实施例附图作简单地介绍,在附图之中,部分标准件未做标注。显而易见地,下面描述的仅仅是本实用新型的部分实施例附图。本申请的示意性实施例及其说明用于解释本申请,并不构成对本申请的不当限定,在附图中。
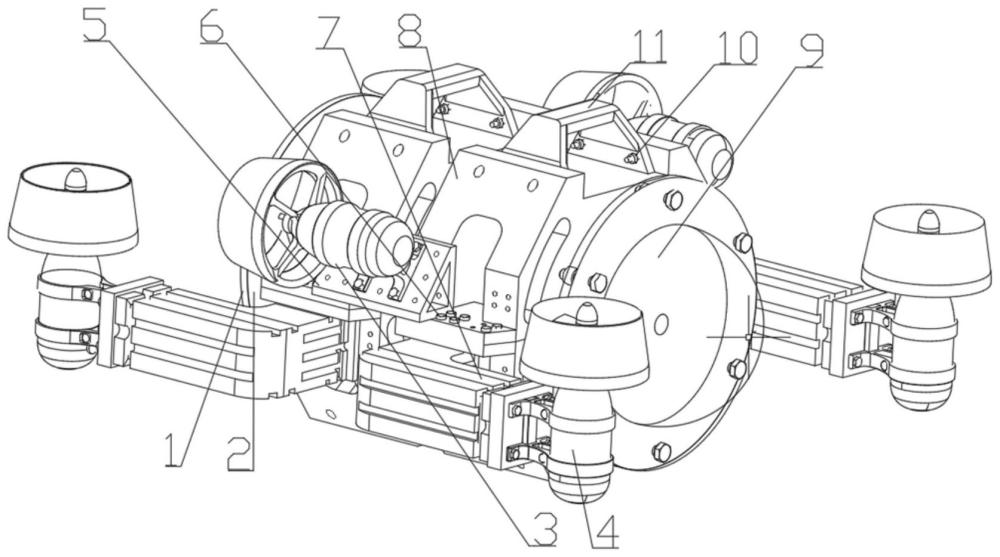
14、图1示意性地示出了根据本申请一种利用机械结构调节平衡的水下机器人的主体结构示意图;
15、图2示意性地示出了根据本申请一种通过机械结构调节平衡的水下机器人的主体基座连接关系示意图;
16、图3示意性地示出了根据本申请一种通过机械结构调节平衡的水下机器人的组合舱体示意图;
17、图4示意性地示出了根据本申请一种通过机械结构调节平衡的水下机器人的水下推进器固定处示意图;
18、图5示意性地示出了根据本申请一种通过机械结构调节平衡的水下机器人的手柄连接处示意图;
19、图6示意性地示出了根据本申请一种通过机械结构调节平衡的水下机器人的侧面电机支架连接处示意图。
技术特征:1.一种利用机械结构调节平衡的水下机器人,所述水下机器人装置其特征是包括后端盖(1)、舱体(2)、水平水下推进器(3)、垂直水下推进器(4)、侧面电机支架(5)、平衡电机支架(7)、主体基座(8)、半球罩(9)、手柄(11);所述舱体(2)和主体基座(8)进行嵌套连接;所述平衡电机支架(7)和侧面电机支架(5)通过六角头螺栓(6)、六角螺母(10)紧固于主体基座(8)侧面两端;所述半球罩(9)通过六角头螺栓(6)、六角螺母(10)连接于舱体(2)的前端,且半球罩(9)内部可放置镜头用于探查管道情况;所述后端盖(1)通过六角头螺栓(6)、六角螺母(10)紧固于舱体(2)的后端,后端盖上的孔位用来固定通孔螺钉,预留电子线路;所述平衡电机支架(7)通过六角头螺栓(6)、六角螺母(10)紧固于主体基座(8)左右两侧;所述手柄(11)通过六角头螺栓(6)、六角螺母(10)紧固于主体基座(8)上侧;所述水平水下推进器(3)和垂直水下推进器(4)通过六角头螺栓(6)、六角螺母(10)紧固于侧面电机支架(5)两端和四个平衡电机支架(7)上。
2.根据权利要求1所述的一种利用机械结构调节平衡的水下机器人,其特征是所述半球罩(9)法兰侧有一个配套的圆形挡板,用来固定水下机器人上携带的镜头。
3.根据权利要求1所述的一种利用机械结构调节平衡的水下机器人,其特征是所述主体基座(8)、舱体(2)、侧面电机支架(5)、平衡电机支架(7)、手柄(11)上的孔位均是螺纹孔,为了便于六角头螺栓(6)、六角螺母(10)的使用。
4.根据权利要求1所述的一种利用机械结构调节平衡的水下机器人,其特征是4个垂直水下推进器(4),相邻设置的两个推进器螺旋桨及旋转方向相反,互相抵消反扭力,进而实现整体的平衡。
5.根据权利要求1所述的一种利用机械结构调节平衡的水下机器人,其特征是所述侧面电机支架(5)上具有多列等距的孔位,通过改变水平水下推进器(3)固定在侧面电机支架(5)上的位置,可以让其水下推进器在侧面电机支架(5)上前移或后退一段距离,从而可以微调水下机器人在水中的平衡。
6.根据权利要求1所述的一种利用机械结构调节平衡的水下机器人,其特征是所述主体基座(8)两侧都具有弧形凹槽,通过在主体基座(8)上挖弧形凹槽来减少水下机器人的重量。
7.根据权利要求1所述的一种利用机械结构调节平衡的水下机器人,其特征是所述主体基座(8)两侧有不同位置的孔位,可根据环境的要求自行调整平衡电机支架(7)和侧面电机支架(5)的位置,使重心微调,以保证水下机器人在不同水下环境下的平衡性。
8.根据权利要求1所述的一种利用机械结构调节平衡的水下机器人,其特征是通过拧松连接主体基座(8)与主体基座(8)之间的螺钉,可以让主体基座(8)、侧面电机支架(5)、平衡电机支架(7)一起在舱体(2)上前移或后移一段距离,进行较大程度的调节水下机器人的平衡。
技术总结本技术涉及一种利用机械结构调节平衡的水下机器人,所述水下机器人装置包括舱体、后端盖、半球罩、水下推进器、平衡电机支架、侧面电机支架、主体基座、手柄。所述舱体和主体基座进行嵌套连接;所述平衡电机支架和侧面电机支架通过六角头螺栓、六角螺母紧固于主体基座侧面两端;所述半球罩通过六角头螺栓、六角螺母紧固于舱体的前端;所述后端盖通过六角头螺栓、六角螺母紧固于舱体的后端;所述手柄通过六角头螺栓、六角螺母紧固于主体基座上侧;所述水下推进器通过六角头螺栓、六角螺母紧固于侧面电机支架两端和侧面平衡电机支架上。本技术具有结构简单、可利用机械结构调节机器人平衡的能力,具有较好的推广价值。技术研发人员:崔昊磊,陈聪聪,伍文均,王莹,冯刚,刘瑞婷,舒羽慧,冯毅,毛瑞杰,郭雯芳受保护的技术使用者:西南科技大学技术研发日:20231205技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/226692.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表