一种适于海底稀软底质的全向移动轮桨机器人
- 国知局
- 2024-08-01 07:16:02
本发明属于水下机器人领域,涉及了一种适于海底稀软底质的全向移动轮桨机器人。
背景技术:
1、随着人们对海洋了解的深入,海洋的探索与开发逐渐向深远海拓展,在深海探索开发的过程中,海底机器人作为探索、开发阶段的载体,机器人在海底的适应性和灵活性是其应当具备的重要性质。海底表层覆盖这一层大含水率的稀软沉积物底质,因此传统的以摩擦力为驱动的行走方式并不适用。
技术实现思路
1、针对上述问题,本发明目的是提出了一种适于海底稀软底质的全向移动轮桨机器人,可以使机器人能够在海底稳定、灵活行走,并适应复杂的海底底质、地形。
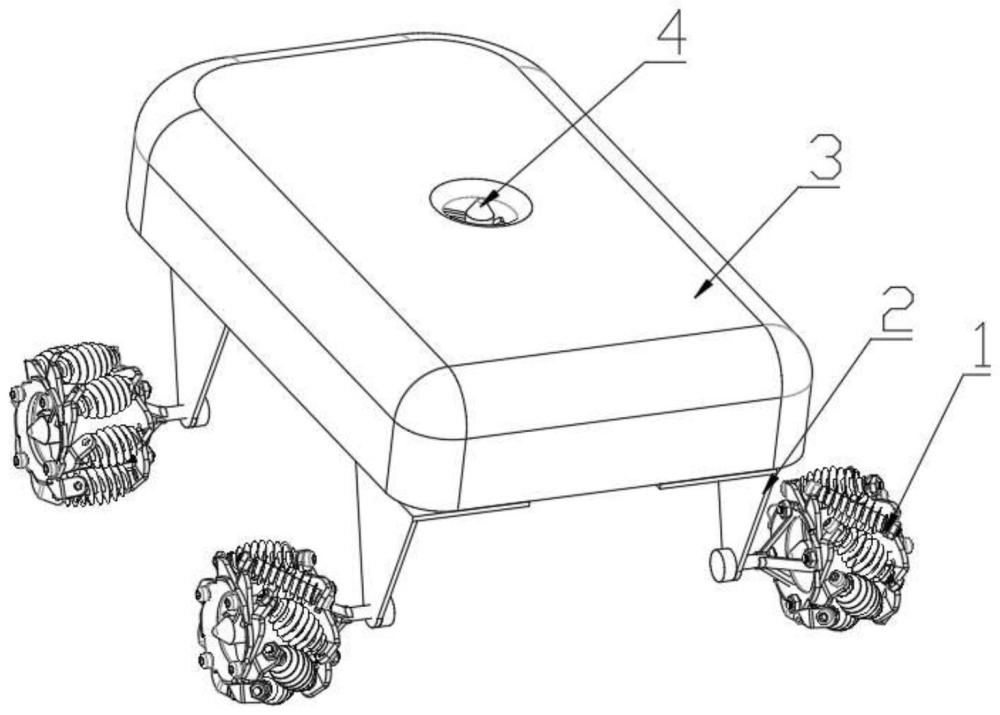
2、本发明的技术方案是:本发明所述的一种适于海底稀软底质的全向移动轮桨机器人,包括机器人主体框架(3),在所述机器人主体框架(3)下端的四角分别安置有四个轮桨转向连杆(2),在四个所述轮桨转向连杆(2)上均安置有螺旋式轮桨(1),所述轮桨转向连杆(2)的一端与螺旋式轮桨(1)相连接,其另一端与机器人主体框架(3)相连接,所述螺旋式轮桨(1)通过轮桨转向连杆(2)与机器人主体框架(3)相连接;
3、在所述机器人主体框架(3)中安置有垂向螺旋桨(4),在所述垂向螺旋桨(4)上连接有电机。
4、进一步的,在四个所述螺旋式轮桨(1)上均安置有电机。
5、进一步的,所述螺旋式轮桨(1)包括螺旋滚轮(11)、紧固轮盘(12)及紧固螺丝(13),
6、在所述螺旋滚轮(11)的顶部安置有连接轴承(14),所述连接轴承(14)通过安置的紧固轮盘(12)及紧固螺丝(13)倾斜排布连接,在所述紧固轮盘(12)处安置有对应的连接螺丝(17)。
7、进一步的,在所述螺旋滚轮(11)的另一端安置有连接导流罩(15),在所述螺旋滚轮(11)内安置有无刷电机螺旋桨(16),在所述连接导流罩(15)与无刷电机螺旋桨(16)之间连接有固定连杆(18),所述无刷电机螺旋桨(16)通过固定连杆(18)与连接导流罩(15)进行固接,并通过连接导流罩(15)、连接螺丝(17)与紧固轮盘(12)相连接、且位于紧固轮盘(12)的中心位置。
8、进一步的,所述连接轴承(14)通过紧固轮盘(12)及紧固螺丝(13)倾斜排布连接的连接方式有+45°排布和-45°排布两种。
9、进一步的,所述轮桨转向连杆(2)包括连接滚轴(22)及垂向连杆(24),所述垂向连杆(24)由水平板和垂向板构成,
10、所述垂向连杆(24)中垂向板的底端的一侧与连接滚轴(22)通过轴承相连接,在所述连接滚轴(22)的另一端连接有连接毂架(21),在所述垂向连杆(24)中垂向板的底端的另一侧安置有转动电机(23);
11、所述连接滚轴(22)的一端与连接毂架(21)相连接,其另一端与转动电机(23)相连接。
12、进一步的,所述连接毂架(21)的一端与连接滚轴(22)相连接,其另一端通过螺丝与螺旋式轮桨(1)的连接导流罩(15)的外缘相连接。
13、进一步的,在所述垂向连杆(24)的水平板上安置有转向电机(25);
14、所述转向电机(25)的顶部与机器人主体框架(3)固接,以联通机器人主体框架(3)与螺旋式轮桨(1)。
15、进一步的,在所述机器人主体框架(3)上、对应垂向螺旋桨(4)处开设有与垂向螺旋桨(4)相适配的圆孔。
16、进一步的,在所述机器人主体框架(3)中还安置有相互连接的电源及控制器、且分别与螺旋式轮桨(1)、轮桨转向连杆(2)及垂向螺旋桨(4)相连接。
17、本发明的基本原理在于:1、本发明采用螺旋滚轮在稀软底质转动,在剪切力作用下产生定向移动的原理,并通过+45°和-45°螺旋滚轮绕轮桨边缘排布,四轮驱动配合以实现机器人的全向移动;2、本发明采用螺旋桨、螺旋滚轮分离驱动的方式,配合桨轮转向,实现海底行走、浮游姿势的切换。
18、本发明的有益效果是:本发明的特点是:1、本发明采用侧向剪切力作为海底机器人行走驱动力,见小了海底沉积物的扰动,对海底生态环境友好;2、本发明采用螺旋滚轮配合四轮驱动的方式实现全向移动;通过螺旋桨、螺旋滚轮分离驱动的方式实现海底行走与浮游姿态的灵活变换,机器人面对海底的复杂环境灵活性、适应性良好。
技术特征:1.一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,包括机器人主体框架(3),在所述机器人主体框架(3)下端的四角分别安置有四个轮桨转向连杆(2),在四个所述轮桨转向连杆(2)上均安置有螺旋式轮桨(1),所述轮桨转向连杆(2)的一端与螺旋式轮桨(1)相连接,其另一端与机器人主体框架(3)相连接,所述螺旋式轮桨(1)通过轮桨转向连杆(2)与机器人主体框架(3)相连接;
2.根据权利要求1所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,在四个所述螺旋式轮桨(1)上均安置有电机。
3.根据权利要求1所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,所述螺旋式轮桨(1)包括螺旋滚轮(11)、紧固轮盘(12)及紧固螺丝(13),
4.根据权利要求3所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,在所述螺旋滚轮(11)的另一端安置有连接导流罩(15),在所述螺旋滚轮(11)内安置有无刷电机螺旋桨(16),在所述连接导流罩(15)与无刷电机螺旋桨(16)之间连接有固定连杆(18),所述无刷电机螺旋桨(16)通过固定连杆(18)与连接导流罩(15)进行固接,并通过连接导流罩(15)、连接螺丝(17)与紧固轮盘(12)相连接、且位于紧固轮盘(12)的中心位置。
5.根据权利要求3所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,所述连接轴承(14)通过紧固轮盘(12)及紧固螺丝(13)倾斜排布连接的连接方式有+45°排布和-45°排布两种。
6.根据权利要求1所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,所述轮桨转向连杆(2)包括连接滚轴(22)及垂向连杆(24),所述垂向连杆(24)由水平板和垂向板构成,
7.根据权利要求6所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,所述连接毂架(21)的一端与连接滚轴(22)相连接,其另一端通过螺丝与螺旋式轮桨(1)的连接导流罩(15)的外缘相连接。
8.根据权利要求6所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,在所述垂向连杆(24)的水平板上安置有转向电机(25);
9.根据权利要求1所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,在所述机器人主体框架(3)上、对应垂向螺旋桨(4)处开设有与垂向螺旋桨(4)相适配的圆孔。
10.根据权利要求1所述的一种适于海底稀软底质的全向移动轮桨机器人,其特征在于,在所述机器人主体框架(3)中还安置有相互连接的电源及控制器、且分别与螺旋式轮桨(1)、轮桨转向连杆(2)及垂向螺旋桨(4)相连接。
技术总结本发明公开了一种适于海底稀软底质的全向移动轮桨机器人;属于水下机器人领域,包括螺旋式轮桨、轮桨转向连杆、机器人主体框架和垂向螺旋桨等设备。本发明采用螺旋滚轮在稀软底质转动,在剪切力作用下产生定向移动的原理,并通过+45°和‑45°螺旋滚轮绕轮桨边缘排布,四轮驱动配合以实现机器人的全向移动;通过螺旋桨、螺旋滚轮分离驱动的方式实现海底行走与浮游姿态的灵活变换,机器人面对海底的复杂环境灵活性、适应性良好。技术研发人员:徐立新,李秀,刘亚娇,窦培林,张曙光,洪智超,韩超帅,沈人杰,于雪莹,盛兴受保护的技术使用者:江苏科技大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240722/226800.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表