水下定点驻留与迁徙的双模式作业平台
- 国知局
- 2024-08-01 07:18:12
本发明涉及水下海洋,具体地,涉及一种水下定点驻留与迁徙的双模式作业平台。
背景技术:
1、海洋环境监测是海洋科学研究与资源开发的基础,对我们认识海洋、监视预报海洋环境、监控海洋交通、了解海洋生物、开发利用海洋资源等具有重要意义;目前用于海洋环境监测和海洋情报信息获取的设备主要有浮标/潜标系统、滑翔机、海底固定观测系统、海洋调查船、水下移动平台、水下剖面仪等。
2、现有公告号为cn102914296b的中国专利申请文献,其公开了一种小型水下自主航行观测平台观测方法,技术步骤包括梯形剖面测量和坐底连续测量。按照甲板单元设定的航线上自主航行,进行梯形剖面测量,测量海流剖面、温度和电导率剖面和水深变化;到达设定的地点,自动沉底进行定点坐底连续测量,测量海流剖面、潮位以及海底处温度、电导率,完成设置的测量时间后,自动上浮,再以同样的方式在返回过程中进行测量,获得的数据通过卫星通信装置传送到甲板单元。
3、现有技术中的观测平台在坐底观测阶段结束后需要上浮至水面,如果需要对多个目标位置进行坐底测量,则需要多次重复水面水平航行阶段、坐底下沉阶段、坐底观测阶段和释放上浮阶段,难以实现长期驻留定点作业和长距离巡航迁徙的作业需求,且耗能大,响应速度慢,存在待改进之处。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种水下定点驻留与迁徙的双模式作业平台。
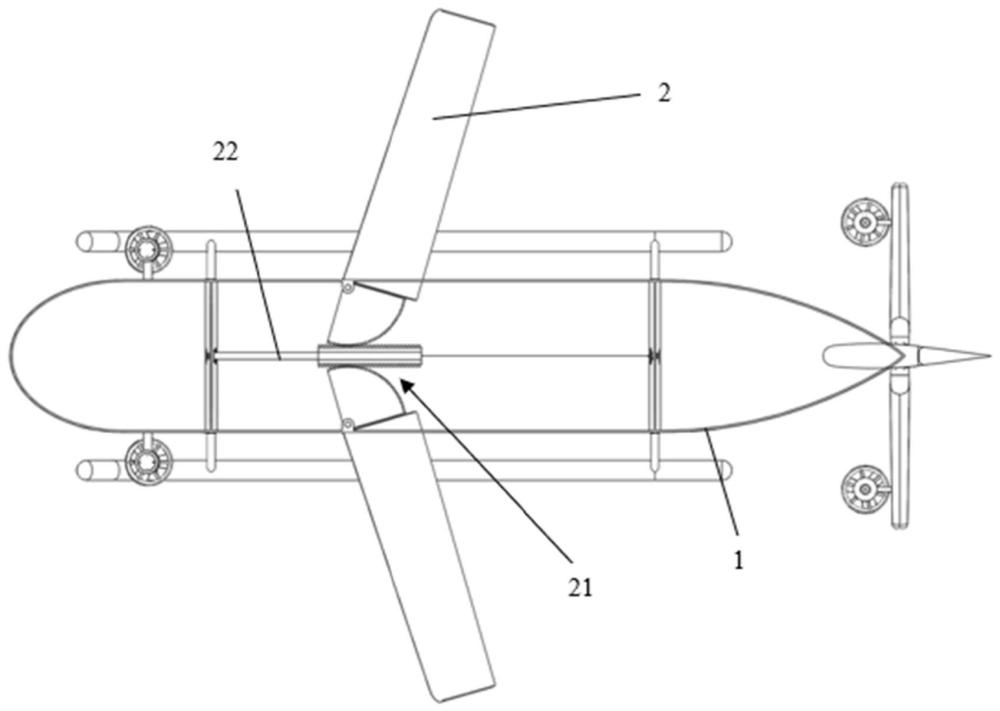
2、根据本发明提供的一种水下定点驻留与迁徙的双模式作业平台,包括作业平台主体,所述作业平台主体的两侧设置有水翼,所述作业平台主体的底部设置有滑橇,所述作业平台上转动安装有水下推进装置,所述作业平台在水中的重量大于浮力,呈负浮力状态;从母船布放至下潜坐落海底阶段:利用作业平台整体在水中呈负浮力下潜至目标位置并驻留;驻留模式向迁徙模式切换阶段:所述水下推进装置产生向上的推力,作业平台整体从海底起升至一定高度后,所述水下推进装置产生向前的推力;巡航阶段:所述水翼因前进航速产生升力,平衡作业平台整体在水中的负浮力进行巡航。
3、优选地,所述水翼为可折叠收入作业平台主体内,在不需要水翼产生升力时,可将水翼折叠收入作业平台主体内,具有保护水翼安全和减小垂向运动阻力的效果。
4、优选地,当需要在海底的多个目标位置进行驻留时:作业平台在上一个目标位置驻留结束并进入巡航阶段后,作业平台整体在水中航行至下一个目标位置上方进行坐底并驻留。
5、优选地,当作业平台整体在水中航行至下一个目标位置时:先降低航速,并使作业平台主体抬头,增加低航速下的升力,最终水平航速会降为零,水翼不再产生升力,在这之前,水下推进装置会调整为垂直状态提供向上的推力,控制作业平台整体平缓着底。
6、优选地,当水下作业全部完成后,所述水翼收入作业平台主体内,所述作业平台主体将滑橇抛载,所述作业平台主体在水中呈正浮力上浮至海面。
7、优选地,坐底阶段:所述滑橇与海底接触;当所述滑橇被海底淤泥吸附,切换阶段所述滑橇无法脱离时:所述作业平台主体将滑橇抛载,所述作业平台主体在水中呈正浮力上浮至海面。
8、优选地,所述作业平台主体的尾部安装有水平尾舵和垂直尾翼,所述垂直尾翼包括尾舵。
9、优选地,所述水下推进装置包括首部矢量推进器和尾部推进器;所述首部矢量推进器在作业平台主体首部的两侧分别至少转动安装有一组;所述尾部推进器在作业平台主体尾部的两侧分别至少转动安装有一组;所述作业平台主体的尾部两侧转动安装有水平尾翼,所述尾部推进器固定安装在水平尾翼上。
10、优选地,所述作业平台主体的外部轮廓呈流线型。
11、优选地,所述作业平台主体的中段包括用于放置作业设备的搭载舱,所述搭载舱的下部设置有可开闭的腹门。
12、与现有技术相比,本发明具有如下的有益效果:
13、1、本发明通过水翼以及作业平台整体在水中的负浮力设计,结合水下推进装置,实现了不调整整机水中重量,利用推进装置的推力实现迁徙过程首末段的升力对抗水下重量,利用水翼升力实现迁徙过程中段的升力对抗水下重量,克服了长期驻留定点作业和长距离巡航迁徙的作业的矛盾,且调整速度快,工作能耗低。
14、2、本发明通过航速和尾舵的配合,使作业平台主体抬头可增加水翼的攻角,在航速下降时仍能提供抵抗负浮力的升力,最终水平航速会将为零,水翼不再产生升力,在这之前,水下推进装置会调整为垂直状态提供向上的推力,控制作业平台整体平缓着底,有助于减少坐底过程中对底区环境的扰乱。
15、3、本发明通过抛弃滑橇后的作业平台主体呈正浮力,从而便于作业平台主体上浮逃脱,具有滑橇的作业平台呈负浮力,便于下潜坐底,有助于提高响应速度。
技术特征:1.一种水下定点驻留与迁徙的双模式作业平台,其特征在于,包括作业平台主体(1),所述作业平台主体(1)的两侧设置有水翼(2),所述作业平台主体(1)的底部设置有滑橇(7),所述作业平台上转动安装有水下推进装置,所述作业平台在水中的重量大于浮力,呈负浮力状态;
2.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,所述水翼(2)为可折叠收入作业平台主体(1)内,在不需要水翼(2)产生升力时,可将水翼(2)折叠收入作业平台主体(1)内。
3.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,当需要在海底的多个目标位置进行驻留时:作业平台在上一个目标位置驻留结束并进入巡航阶段后,作业平台整体在水中航行至下一个目标位置上方进行坐底并驻留。
4.如权利要求3所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,当作业平台整体在水中航行至下一个目标位置时:
5.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,当水下作业全部完成后,所述水翼(2)收入作业平台主体(1)内,所述作业平台主体(1)将滑橇(7)抛载,所述作业平台主体(1)在水中呈正浮力上浮至海面。
6.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,坐底阶段:所述滑橇(7)与海底接触;
7.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,所述作业平台主体(1)的尾部安装有水平尾舵(4)和垂直尾翼(6),所述垂直尾翼(6)包括尾舵(601)。
8.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,所述水下推进装置包括首部矢量推进器(3)和尾部推进器(5);
9.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,所述作业平台主体(1)的外部轮廓呈流线型。
10.如权利要求1所述的水下定点驻留与迁徙的双模式作业平台,其特征在于,所述作业平台主体(1)的中段包括用于放置作业设备的搭载舱,所述搭载舱的下部设置有可开闭的腹门(101)。
技术总结本发明提供了一种水下定点驻留与迁徙的双模式作业平台,包括:从母船布放至下潜坐落海底阶段:利用作业平台整体在水中呈负浮力下潜至目标位置并驻留;驻留模式向迁徙模式切换阶段:水下推进装置产生向上的推力,作业平台整体从海底起升至一定高度后,水下推进装置产生向前的推力;巡航阶段:水翼因前进航速产生升力,平衡作业平台整体在水中的负浮力进行巡航。水翼为可折叠收入作业平台主体内,在不需要水翼产生升力时,可将水翼折叠收入作业平台主体内,实现了不调整整机水中重量,利用推进装置的推力实现迁徙过程首末段的升力对抗水下重量,利用水翼升力实现迁徙过程中段的升力对抗水下重量,克服了驻留定点作业和长巡航迁徙作业的矛盾。技术研发人员:庄广胶,张宇受保护的技术使用者:上海交通大学技术研发日:技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/227006.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表