一种水下机器人浮力控制机构的制作方法
- 国知局
- 2024-08-01 07:18:21
本技术属于水下机器人,具体为一种水下机器人浮力控制机构。
背景技术:
1、水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,水下机器人已成为开发海洋的重要工具,其中无人遥控潜水器主要有缆遥控潜水器和无缆遥控潜水器两种,有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种,水下机器人的水下运动和作业,是由操作员在水面母舰上控制和监视,靠电缆向本体提供动力和交换信息。
2、经过检索,公开号为cn116873167a的专利公开了一种水下机器人浮力控制机构,包括水下机器人本体、支撑板和支撑座,水下机器人本体和供电座侧面安装有两组连接架,支撑座上表面设置有对水下机器人本体下降进行减震的缓冲组件,支撑板下表面设置有将水下机器人本体下降的作用力进行传导的传导模块,缓冲组件包括连接于支撑座内侧壁的两组减震器、减震阻尼和第三铰接座,采用缓冲组件和传导模块对水下机器人本体下降的作用力进行减震和传导,提高了机器人的稳定性和安全性;工作时,通过潜水泵将水抽进主水密槽内,主水密槽内的水通过输水管进入副水密槽内,主水密舱和副水密舱内的水量增加,水下机器人本体开始下降,通过第二推进器带动水下机器人本体下降。
3、但潜水泵在抽水和排水的过程中,会将水体内漂浮的水草和垃圾等杂物等吸入主水密槽和副水密槽内,容易对输水管造成堵塞,影响主水密槽与副水密槽的吸水排水效果,并对水下机器人的工作带来潜在风险。
技术实现思路
1、本实用新型的目的在于提供一种水下机器人浮力控制机构,以解决上述背景技术提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种水下机器人浮力控制机构,包括水下机器人本体、摄像头和供电座,
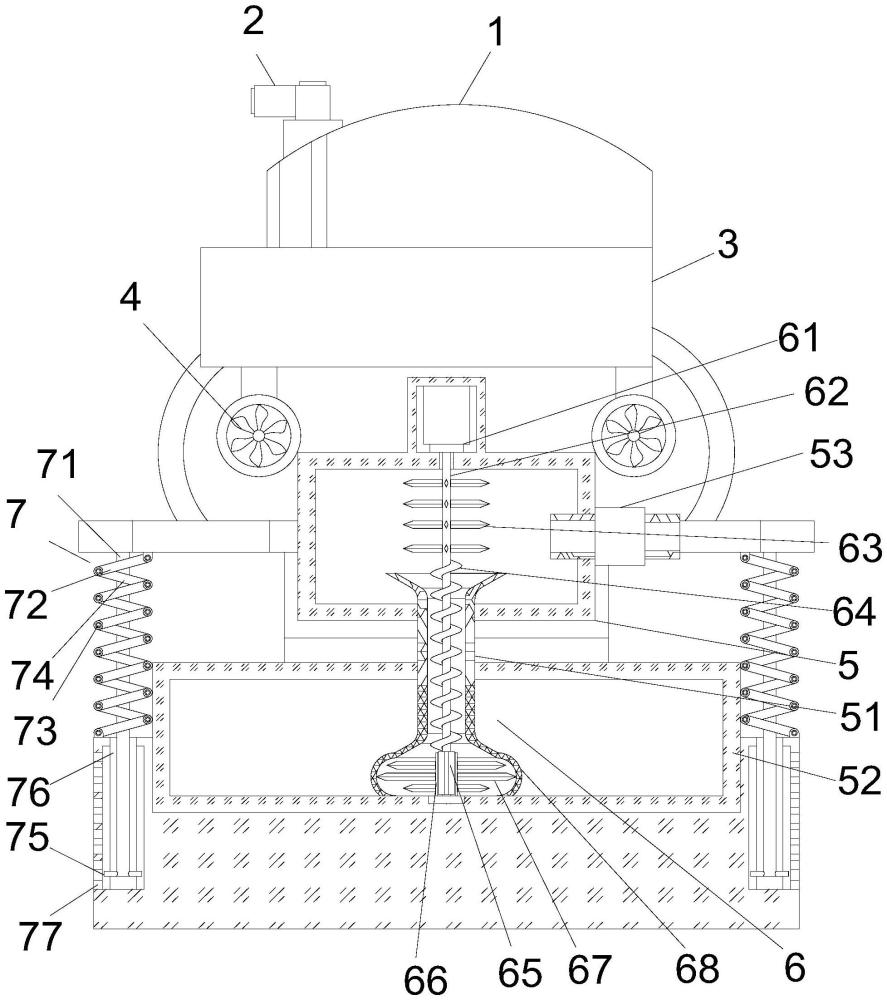
3、所述水下机器人本体顶部安装有摄像头,所述摄像头下侧设置有供电座,所述供电座底部设置有推进器,所述供电座底部连接有主水密槽,所述主水密槽底部通过输水管连接有副水密槽,所述主水密槽的一端安装有潜水泵,所述主水密槽与副水密槽内部设置有防堵塞机构,所述防堵塞机构由防堵电机、旋转柱、第一破碎层、输送绞龙、插接柱、对接柱、第二破碎层和滤网构成。
4、优选的,所述主水密槽上侧安装有防堵电机,所述防堵电机底部通过轴联器与旋转柱的一端相连接,所述旋转柱的另一端通过插接柱与副水密槽内部的对接柱相插接。
5、优选的,所述旋转柱上侧设置有第一破碎层,所述旋转柱中部连接有输送绞龙,所述对接柱外侧设置有第二破碎层,所述第一破碎层由等距排列的刀片构成。
6、优选的,所述第二破碎层由尺寸不一的刀片构成,所述输水管底部安装有滤网,所述水下机器人本体的两侧对称设置有防晃机构。
7、优选的,所述防晃机构由稳定柱、连接杆、限位销、支撑杆、稳定块、稳定槽和滤水槽构成,所述稳定柱外侧设置有连接杆。
8、优选的,所述连接杆内部通过限位销与支撑杆旋转连接,两根所述支撑杆与稳定柱滑动连接,所述稳定柱底部通过稳定块与稳定槽滑动连接,所述水下机器人本体靠近稳定槽的一侧开设有滤水槽。
9、与现有技术相比,本实用新型的有益效果为:
10、1.为防止杂物影响主水密槽与副水密槽的吸水排水效果,使用本实用新型在水下进行吸水时,启动潜水泵的同时同步启动防堵电机,防堵电机的输出端通过联轴器带动旋转柱旋转,从而带动第一破碎层、输送绞龙、插接柱、对接柱和第二破碎层旋转,当杂物通过潜水泵进入主水密槽后,先被第一破碎层初步破碎后,通过输送绞龙沿输水管进入滤网内部,被由不同尺寸大小的刀片构成的第二破碎层进行再次破碎后在滤网内暂时存储,本实用新型设置有防堵塞机构,可有效防止被潜水泵吸入的杂物堵塞输水管,便于水下机器人本体进行水下工作,操作方便;
11、2.为便于水下机器人本体可在水下稳定伸缩,水下机器人本体上侧的部分与水下机器人本体下侧的部分通过稳定柱进行对接,启动水下机器人本体内部的组件,水下机器人本体上侧的部分向上移动,带动稳定柱向上伸展,并带动连接杆和支撑杆旋转角度,支撑杆在旋转的过程中始终处于与稳定柱滑动和抵接的状态,在支撑杆的作用下,水下机器人本体不会因水流的冲击发生偏移,本实用新型设置有防晃机构,可有效防止水下机器人本体在水下伸缩时发生晃动,增强了稳定性。
技术特征:1.一种水下机器人浮力控制机构,包括水下机器人本体(1)、摄像头(2)和供电座(3),其特征在于:
2.根据权利要求1所述的一种水下机器人浮力控制机构,其特征在于:所述主水密槽(5)上侧安装有防堵电机(61),所述防堵电机(61)底部通过轴联器与旋转柱(62)的一端相连接,所述旋转柱(62)的另一端通过插接柱(65)与副水密槽(52)内部的对接柱(66)相插接。
3.根据权利要求2所述的一种水下机器人浮力控制机构,其特征在于:所述旋转柱(62)上侧设置有第一破碎层(63),所述旋转柱(62)中部连接有输送绞龙(64),所述对接柱(66)外侧设置有第二破碎层(67),所述第一破碎层(63)由等距排列的刀片构成。
4.根据权利要求3所述的一种水下机器人浮力控制机构,其特征在于:所述第二破碎层(67)由尺寸不一的刀片构成,所述输水管(51)底部安装有滤网(68),所述水下机器人本体(1)的两侧对称设置有防晃机构(7)。
5.根据权利要求4所述的一种水下机器人浮力控制机构,其特征在于:所述防晃机构(7)由稳定柱(71)、连接杆(72)、限位销(73)、支撑杆(74)、稳定块(75)、稳定槽(76)和滤水槽(77)构成,所述稳定柱(71)外侧设置有连接杆(72)。
6.根据权利要求5所述的一种水下机器人浮力控制机构,其特征在于:所述连接杆(72)内部通过限位销(73)与支撑杆(74)旋转连接,两根所述支撑杆(74)与稳定柱(71)滑动连接,所述稳定柱(71)底部通过稳定块(75)与稳定槽(76)滑动连接,所述水下机器人本体(1)靠近稳定槽(76)的一侧开设有滤水槽(77)。
技术总结本技术属于水下机器人技术领域,具体为一种水下机器人浮力控制机构,包括水下机器人本体、摄像头和供电座,水下机器人本体顶部安装有摄像头,摄像头下侧设置有供电座,供电座底部设置有推进器,供电座底部连接有主水密槽,主水密槽底部通过输水管连接有副水密槽,主水密槽的一端安装有潜水泵,主水密槽与副水密槽内部设置有防堵塞机构,防堵塞机构由防堵电机、旋转柱、第一破碎层、输送绞龙、插接柱、对接柱、第二破碎层和滤网构成。本技术通过设置防堵塞机构,可有效防止被潜水泵吸入的杂物堵塞输水管,便于水下机器人本体进行水下工作,操作方便;通过设置防晃机构,可有效防止水下机器人本体在水下伸缩时发生晃动,增强了稳定性。技术研发人员:刘文智,王顺礼,韩锦亮,周翰文,于力明,刘汉强,张志强,秦明达,刘丕业受保护的技术使用者:智真海洋科技(威海)有限公司技术研发日:20231219技术公布日:2024/7/11本文地址:https://www.jishuxx.com/zhuanli/20240722/227018.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表