一种高瞬态功率的双稳态仿生弹跳机器人及其控制方法
- 国知局
- 2024-08-01 07:36:50
本发明属于机器人及能量转化,具体涉及一种高瞬态功率的双稳态仿生弹跳机器人及其控制方法。
背景技术:
1、近年来,随着科技的不断发展和人工智能的快速普及,机器人的应用场景变得越来越丰富多样。然而,传统机器人却面临着越来越复杂的工作需求,已经难以满足市场的需求,特别是采用电机装配减速器作为驱动方式来提供动力的传统机器人,由于其灵活性差、顺应性差、轻量化程度低等缺陷,已经无法胜任那些面向特种环境的作业。这种特种环境可能包括需要在狭小空间内作业、需要在恶劣环境下作业或需要与人类进行密切合作的情况。因此,传统机器人的局限性已经成为制约其应用范围和效率的主要因素之一。传统的依靠电机装配减速器的轮式、足式或履带式机器人难以适应非结构化工作环境,难以满足军事探测和灾后救援等特殊需求。
2、很多生物都能进行跳跃运动,因此目前的仿生跳跃机器人主要模仿青蛙、蝗虫等生物的跳跃机理,特别是它们腿部的运动方式。目前,利用不同机理和装置将势能转化为动能,特别是应变能的快速释放已成为近年来的热门方向,现有技术中大多采用电机或舵机驱动机器人进行跳跃,难以减轻机器人质量从而难以在根本上减少机器人的负载。弹簧蓄能具有结构简单、易于小型化等优点,现有技术中采用弹簧驱动的仿生跳跃机器人已具有质量轻、小型化的优点,但其驱动功率较小,无法实现机器人的高功率连续跳跃,且难以保证肢体伸缩的同步性,稳定性不高。
3、其中,单足弹跳机器人相对较好地实现了跳跃功能,而多组弹跳机器人对弹跳方向及弹起高度能进行灵活的控制。机器人弹性单元的双稳态特性完成应变能的慢速存储和快速释放,为微小型仿生机器人提供强有力的动力来源。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种高瞬态功率的双稳态仿生弹跳机器人及其控制方法。
2、具体的技术方案如下:
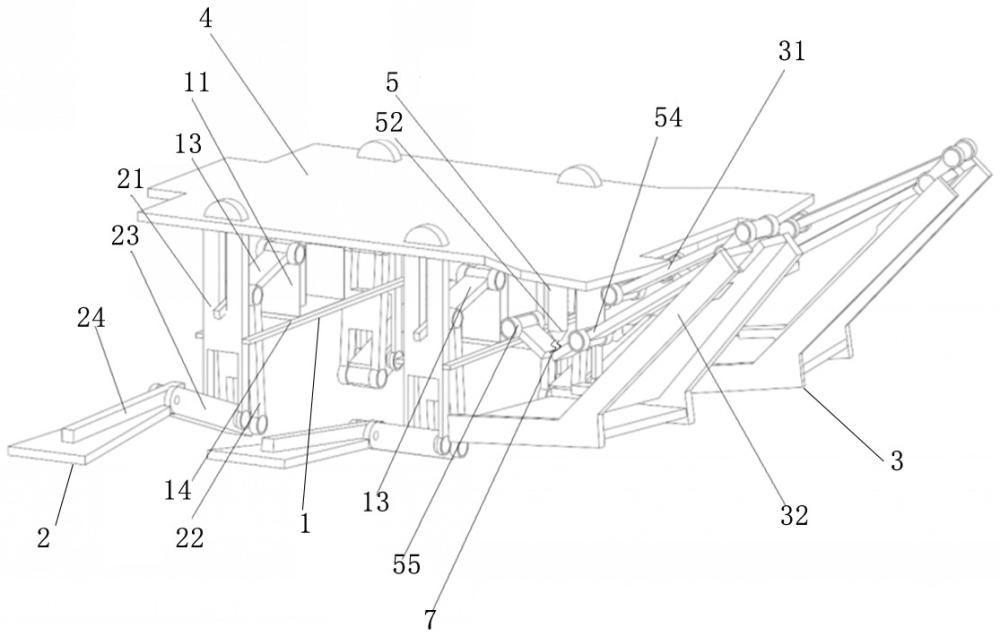
3、一种高瞬态功率的双稳态仿生弹跳机器人,包括前肢双稳态驱动器、前肢跳跃系统、后肢跳跃系统、主体体板和后肢双稳态驱动器,前肢跳跃系统设置在主体体板的两侧,后肢跳跃系统设置在主体体板的后侧,用于驱动前肢跳跃系统上下跳跃的前肢双稳态驱动器位于两侧的前肢跳跃系统之间,用于驱动后肢跳跃系统上下跳跃的后肢双稳态驱动器位于主体体板和后肢跳跃系统之间,通过气泵对前肢双稳态驱动器和后肢双稳态驱动器充气抽气过程实现双稳态转换,从而驱动前肢跳跃系统和后肢跳跃系统上下跳跃。
4、进一步地,前肢双稳态驱动器包括第一双稳态玻璃纤维骨架、第一透明薄膜气囊和第一驱动板,前肢双稳态驱动器通过第一固定杆与两侧的前肢跳跃系统固定连接,第一双稳态玻璃纤维骨架为u型,其下端固定在第一固定杆上,第一双稳态玻璃纤维骨架内设有第一透明薄膜气囊,第一透明薄膜气囊内设有压缩弹簧,第一双稳态玻璃纤维骨架的上方两端均设有第一转动轴套,第一转动轴套分别与两侧的第一驱动板的上方铰接,第一驱动板上端通过尼龙连接绳与第一透明薄膜气囊的上端连接,第一驱动板下方通过第二转动轴套与两侧的前肢跳跃系统铰接,气泵充气抽气实现双稳态转化,带动第一驱动板上下摆动,从而带动前肢跳跃系统实现跳跃。
5、进一步地,前肢跳跃系统包括前肢固定板、前肢大腿、前肢小腿和前肢脚掌,第一固定杆的两端分别固定在两侧的前肢固定板上,前肢固定板上开设有导向孔,第一驱动板的下端插入导向孔内,前肢固定板的上端与主体体板固定连接,下端与前肢小腿铰接,前肢大腿的上端与第一驱动板下方通过第二转动轴套铰接,前肢大腿的下端与前肢小腿的一端铰接,前肢小腿的另一端与前肢脚掌的一端铰接。
6、进一步地,后肢双稳态驱动器包括第二双稳态玻璃纤维骨架、第二透明薄膜气囊、第二驱动板和第三驱动板,第二双稳态玻璃纤维骨架为倒u型,其上表面与主体体板的下表面固定连接,第二双稳态玻璃纤维骨架内设有第二透明薄膜气囊,第二透明薄膜气囊内设有压缩弹簧,第二双稳态玻璃纤维骨架的下方两端均设有第三转动轴套,一侧的第三转动轴套与第二驱动板的上端铰接,另一侧的第三转动轴套与第三驱动板的下方铰接,第三驱动板的下端与第二驱动板的下端分别通过尼龙连接绳与第二透明薄膜气囊下端连接,第三驱动板的上端与后肢跳跃系统铰接,后肢跳跃系统与主体体板铰接,气泵充气抽气过程实现双稳态转化,带动第二驱动板和第三驱动板上下摆动,从而带动后肢跳跃系统实现跳跃。
7、进一步地,后肢跳跃系统包括后肢摇杆、后肢脚掌和连接段,连接段固定在后肢脚掌的上端,第三驱动板的上端与连接段铰接,后肢摇杆的一端与连接段铰接,另一端与主体体板铰接。
8、一种高瞬态功率的双稳态仿生弹跳机器人的控制方法,包括如下步骤:
9、气泵向第一透明薄膜气囊和第二透明薄膜气囊内充气,使得压缩弹簧发生拉伸并且积累弹簧势能,前肢双稳态驱动器的第一驱动板被向外顶出,后肢双稳态驱动器的第二驱动板和第三驱动板被向外顶出,尼龙连接绳对其限位,前肢脚掌和后肢脚掌处于收起状态;
10、气泵抽气,第一透明薄膜气囊和第二透明薄膜气囊开始收缩,带动压缩弹簧收缩,随着第一双稳态玻璃纤维骨架和第二双稳态玻璃纤维骨架的自身弹性势能的释放,拉动前肢双稳态驱动器的第一驱动板、后肢双稳态驱动器的第二驱动板和第三驱动板摆动,第一驱动板拉动前肢跳跃系统向下摆动,前肢脚掌向下延伸,同理,第二驱动板和第三驱动板拉动后肢跳跃系统向下摆动,后肢摇杆向下摆动,带动后肢脚掌向下摆动;
11、气泵继续抽气,当第一双稳态玻璃纤维骨架和第二双稳态玻璃纤维骨架完全释放自身弹性势能时,压缩弹簧也恢复到了原长,第一驱动板、第二驱动板和第三驱动板摆动到了极限位置,前肢脚掌和后肢脚掌继续向下摆动,摆动到极限位置,即前肢脚掌和前肢小腿共线;
12、按照步骤)到步骤)的过程,如此往复,实现整体的跳跃前进。
13、第一透明薄膜气囊和第二透明薄膜气囊通过气管与外界气泵相连,双稳态仿生弹跳机器人为完全左右对称。
14、本发明的有益效果在于:
15、1)本发明通过设置双稳态驱动器来进行驱动,降低了机构的复杂性,使得双稳态仿生弹跳机器人结构简单紧凑、轻巧、制作成本低,且保证了机器人动作的对称性和稳定性;通过调整前肢跳跃系统相对于主体体板的角度,可实现对双稳态仿生弹跳机器人跳跃方向的控制;
16、2)本发明的双稳态驱动器可以在一个微小的控制量变化下,让机构自行快速切换到下一个稳态,从而达到能量快速释放的效果,实现高瞬态功率,满足机器人跳跃高度和距离;
17、3)本发明的双稳态驱动器可以通过调整双稳态变化临界点来控制机器人响应速度,在水面、沙地等地形均可实现跳跃。
技术特征:1.一种高瞬态功率的双稳态仿生弹跳机器人,其特征在于,包括前肢双稳态驱动器(1)、前肢跳跃系统(2)、后肢跳跃系统(3)、主体体板(4)和后肢双稳态驱动器(5),前肢跳跃系统(2)设置在主体体板(4)的两侧,后肢跳跃系统(3)设置在主体体板(4)的后侧,用于驱动前肢跳跃系统(2)上下跳跃的前肢双稳态驱动器(1)位于两侧的前肢跳跃系统(2)之间,用于驱动后肢跳跃系统(3)上下跳跃的后肢双稳态驱动器(5)位于主体体板(4)和后肢跳跃系统(3)之间,通过气泵对前肢双稳态驱动器(1)和后肢双稳态驱动器(5)充气抽气实现双稳态转换,从而带动前肢跳跃系统(2)和后肢跳跃系统(3)上下跳跃。
2.如权利要求1所述的一种高瞬态功率的双稳态仿生弹跳机器人,其特征在于,前肢双稳态驱动器(1)包括第一双稳态玻璃纤维骨架(11)、第一透明薄膜气囊(12)和第一驱动板(13),前肢双稳态驱动器(1)通过第一固定杆(14)与两侧的前肢跳跃系统(2)固定连接,第一双稳态玻璃纤维骨架(11)为u型,其下端固定在第一固定杆(14)上,第一双稳态玻璃纤维骨架(11)内设有第一透明薄膜气囊(12),第一透明薄膜气囊(12)内设有压缩弹簧(6),第一双稳态玻璃纤维骨架(11)的上方两端均设有第一转动轴套(15),第一转动轴套(15)分别与两侧的第一驱动板(13)的上方铰接,第一驱动板(13)上端通过尼龙连接绳(7)与第一透明薄膜气囊(12)的上端连接,第一驱动板(13)下方通过第二转动轴套(16)与两侧的前肢跳跃系统(2)铰接,气泵充气抽气实现双稳态转换,带动第一驱动板(13)上下摆动,从而带动前肢跳跃系统(2)实现跳跃。
3.如权利要求2所述的一种高瞬态功率的双稳态仿生弹跳机器人,其特征在于,前肢跳跃系统(2)包括前肢固定板(21)、前肢大腿(22)、前肢小腿(23)和前肢脚掌(24),第一固定杆(14)的两端分别固定在两侧的前肢固定板(21)上,前肢固定板(21)上开设有导向孔(211),第一驱动板(13)的下端插入导向孔(211)内,前肢固定板(21)的上端与主体体板(4)固定连接,下端与前肢小腿(23)铰接,前肢大腿(22)的上端与第一驱动板(13)下方通过第二转动轴套(16)铰接,前肢大腿(22)的下端与前肢小腿(23)的一端铰接,前肢小腿(23)的另一端与前肢脚掌(24)的一端铰接。
4.如权利要求3所述的一种高瞬态功率的双稳态仿生弹跳机器人,其特征在于,后肢双稳态驱动器(5)包括第二双稳态玻璃纤维骨架(51)、第二透明薄膜气囊(52)、第二驱动板(53)和第三驱动板(54),第二双稳态玻璃纤维骨架(51)为倒u型,其上表面与主体体板(4)的下表面固定连接,第二双稳态玻璃纤维骨架(51)内设有第二透明薄膜气囊(52),第二透明薄膜气囊(52)内设有压缩弹簧(6),第二双稳态玻璃纤维骨架(51)的下方两端均设有第三转动轴套(55),一侧的第三转动轴套(55)与第二驱动板(53)的上端铰接,另一侧的第三转动轴套(55)与第三驱动板(54)的下方铰接,第三驱动板(54)的下端与第二驱动板(53)的下端分别通过尼龙连接绳(7)与第二透明薄膜气囊(52)下端连接,第三驱动板(54)的上端与后肢跳跃系统(3)铰接,后肢跳跃系统(3)与主体体板(4)铰接,气泵充气抽气实现双稳态转换,带动第二驱动板(53)和第三驱动板(54)上下摆动,从而带动后肢跳跃系统(3)实现跳跃。
5.如权利要求4所述的一种高瞬态功率的双稳态仿生弹跳机器人,其特征在于,后肢跳跃系统(3)包括后肢摇杆(31)、后肢脚掌(32)和连接段(33),连接段(33)固定在后肢脚掌(32)的上端,第三驱动板(54)的上端与连接段(33)铰接,后肢摇杆(31)的一端与连接段(33)铰接,另一端与主体体板(4)铰接。
6.一种如权利要求5所述的高瞬态功率的双稳态仿生弹跳机器人的控制方法,其特征在于,包括如下步骤:
技术总结本发明公开了一种高瞬态功率的双稳态仿生弹跳机器人及其控制方法,机器人包括前肢双稳态驱动器、前肢跳跃系统、后肢跳跃系统、主体体板和后肢双稳态驱动器,前肢跳跃系统设置在主体体板两侧,后肢跳跃系统设置在主体体板的后侧,用于驱动前肢跳跃系统上下跳跃的前肢双稳态驱动器位于两侧的前肢跳跃系统之间,用于驱动后肢跳跃系统上下跳跃的后肢双稳态驱动器位于主体体板和后肢跳跃系统之间,通过气泵对前肢双稳态驱动器和后肢双稳态驱动器充气抽气过程实现驱动,从而带动前肢跳跃系统和后肢跳跃系统上下跳跃。本发明的机器人可以调节跳跃方向,具有高输出功率,能够连续跳跃、稳定性好、结构简单、紧凑、轻巧、制作成本低、体积小质量轻等优势。技术研发人员:叶阳天,盛超琦,王翔,张奕怡,宋逸,裘烨,田野,吴化平受保护的技术使用者:浙江工业大学技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240722/228209.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表