一种分体式自适应环境智能侦测机器人
- 国知局
- 2024-08-01 07:40:07
本技术属于机器人,具体涉及一种分体式自适应环境智能侦测机器人。
背景技术:
1、当今最为主流的两类机器人,地面移动机器人与空中飞行机器人可以通过组成地空异构多机器人系统来进行相互协调与合作,以此来实现两种具有不同结构功能的机器人在负载、感知、通讯等方面的能力互补。通过综合性的系统调配以实现原先难以实现的技术任务,如相互跟踪、协同降落、编队控制、目标识别与跟踪、任务分配、路径规划等。
2、2022年6月10日,浙江大学湖州研究院与杭州云深处科技签订战略合作协议。双方筹建联合实验室,共同推进机器人前沿领域科研合作与成果转化。浙大湖州研究院和云深处公司分别是无人机与四足机器人的技术领跑者。双方此次联合,针对四足机器人与空中机器人协同作业开展深度合作,推动“机狗协同”。
3、多机器人系统的开发与完善拥有光明的前景,研究设计具备更完备功能的多机器人协同工作的复合系统,搭建完善的机器人社会是当今机器人领域的热点项目。多机器人系统(mrs,multi-robot systems)是由多个具有独立自主能力的机器人组成的集合,随着计算机技术的发展以及智能算法的更新迭代,机器人个体与群组正在逐步向机器人社会过渡。在一个完善的机器人社会当中,个体机器人能够根据任务需求与周围环境的变化进行相互协调而形成群组,协同完成更具复杂性的工作。
技术实现思路
1、本实用新型所要解决的技术问题在于针对上述现有技术中的不足,提供一种分体式自适应环境智能侦测机器人,在四足机器人视角受限或路线遇障情况下,启动无人机来探测前行路况状态,用于解决探测机器人探测范围扁平化的技术问题。
2、本实用新型采用以下技术方案:
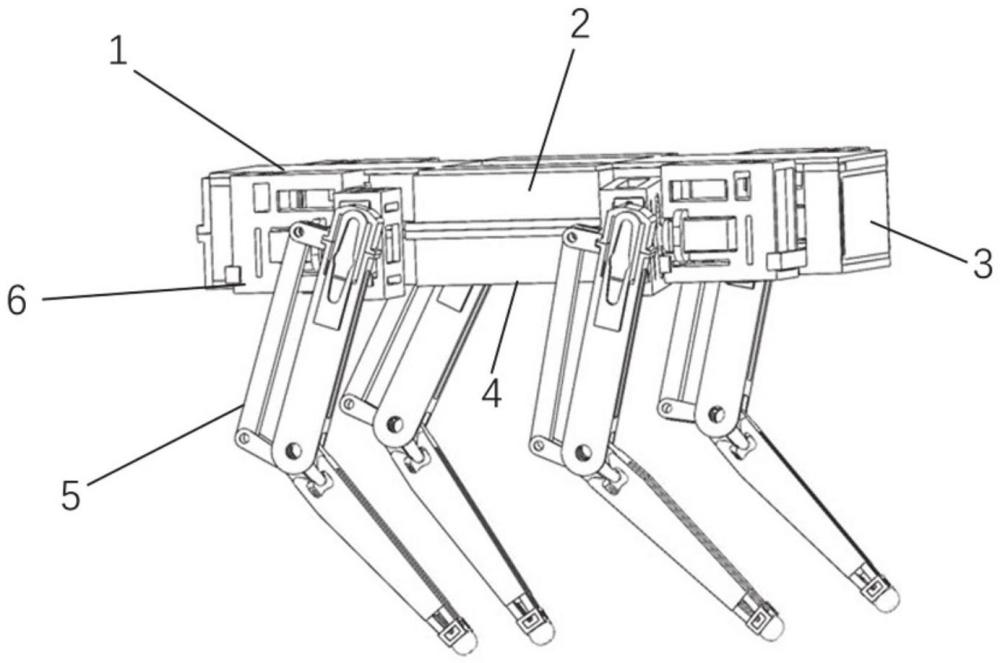
3、一种分体式自适应环境智能侦测机器人,包括机器人躯干,机器人躯干的两侧对称设置有四个机器人足,机器人躯干的前后两端分别设置有摄像头,机器人躯干的顶部设置有无人机停机舱,无人机停机舱内设置有无人机。
4、具体的,无人机停机舱上设置有舱盖,舱盖为滑动式结构,无人机停机舱的两侧设置有用于固定无人机的机械爪扣。
5、进一步的,无人机停机舱内设置有舵机,舵机经舵杆及弧形杆与机械爪扣连接,通过机械爪扣与无人机的底盘连接。
6、进一步的,舱盖的一端通过传动杆与螺旋杆连接,螺旋杆由电机驱动工作。
7、更进一步的,舱盖的两端分别通过运动杆与对应的滑轨连接。
8、具体的,无人机停机舱采用下沉式结构。
9、具体的,机器人足包括第一舵机,第一舵机的一端通过第二舵机与机器人躯干固定连接,另一端经连接杆和轴承与腿杆连接。
10、进一步的,腿杆的底部设置有足底。
11、更进一步的,足底为半球形结构。
12、具体的,无人机采用无线通信或北斗导航与四足机器人连接。
13、与现有技术相比,本实用新型至少具有以下有益效果:
14、(1)本实用新型实施例提供的分体式全景信息探测机器人,无人机可飞行至一定高度,在视觉传感器的帮助下具有全局视野的优势,可以弥补四足机器人在地面空间视野受限的劣势。同样地,四足机器人的快速定位地面目标的优势与长续航高负载的优势,可以弥补无人机在空中续航时间短、负载能力小的劣势。因此,地空异构多机器人系统通过空中和地面的协作和互补,能够完成单独种类机器人编队无法完成的任务,如大片区域排查、地理勘测、跟踪追逃、物体识别、救援和运输。
15、(2)置于四足机器人内部的舱室为无人机设备与四足机器人的协同提供了更稳定的环境,舱内固定装置可以在恶劣环境下保护无人机设备,同时也增强了整机续航能力,极大长度上增长了工作时间,有利于更全面地执行探测与侦察任务。
16、(3)本实用新型提供的分体式全景信息探测机器人,舱室内部通过无人机底座与由舵机带动的机械爪扣固定无人机设备,由舵机带动的机械爪扣能够将无人机牢牢固定在四足机器人的舱室内部,避免因震荡引起无人机脱落并进一步导致损坏,拥有较高的稳定性与环境适应力。
17、(4)在机器人摄像头视角受限情况下,通过启动无人机获取前行道路状况;当摄像头视角良好的情况下,无人机和机器人通过北斗导航获取当前位置信息,且结合无线通信模块共享彼此的位置信息,不断缩短二者之间的距离直至无人机进入机器人舱室内。能够对危险区域进行探测,降低工作人员探测的成本和风险。以更强的灵活性侦测复杂环境。
18、综上所述,本实用新型通过切实分析四足机器人与无人机在实际应用过程中所遇到的问题,将传统四足机器人与无人机各自的优势区间相结合,通过分体与交互实现功能的耦合,使得其在原先不适应的环境中仍能有效发挥自身的功能与作用;不仅解决了原先四足机器人与无人机在恶劣环境下无法正常工作的问题,更是通过二者功能的复合提高各自在特定情况下的适应性,以此实现工作效率与功能性的共同提升结合交互式无人机具有的高空探测技术优势,增强了机器人高低空的视觉系统,提高了机器人从不同角度观察环境的能力;又增强了机器人在不同环境下工作的适应性,同时机械结构简单、成本低、易改造、易实现;其具有灵活、泛用性强、抗压能力优秀的特点,在地质勘探、教育教学、地图构建、目标追踪及物体识别、化工搬运场合有非常好的应用前景。。
19、下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
技术特征:1.一种分体式自适应环境智能侦测机器人,其特征在于,包括机器人躯干(4),机器人躯干(4)的两侧对称设置有四个机器人足(5),机器人躯干(4)的前后两端分别设置有摄像头(3),机器人躯干(4)的顶部设置有无人机停机舱(2),无人机停机舱(2)内设置有无人机。
2.根据权利要求1所述的分体式自适应环境智能侦测机器人,其特征在于,无人机停机舱(2)上设置有舱盖(1),舱盖(1)为滑动式结构,无人机停机舱(2)的两侧设置有用于固定无人机的机械爪扣(17)。
3.根据权利要求2所述的分体式自适应环境智能侦测机器人,其特征在于,无人机停机舱(2)内设置有舵机(19),舵机(19)经舵杆及弧形杆(20)与机械爪扣(17)连接,通过机械爪扣(17)与无人机的底盘连接。
4.根据权利要求2所述的分体式自适应环境智能侦测机器人,其特征在于,舱盖(1)的一端通过传动杆(22)与螺旋杆(21)连接,螺旋杆(21)由电机驱动工作。
5.根据权利要求4所述的分体式自适应环境智能侦测机器人,其特征在于,舱盖(1)的两端分别通过运动杆(23)与对应的滑轨(24)连接。
6.根据权利要求1至5中任一项所述的分体式自适应环境智能侦测机器人,其特征在于,无人机停机舱(2)采用下沉式结构。
7.根据权利要求1所述的分体式自适应环境智能侦测机器人,其特征在于,机器人足(5)包括第一舵机(7),第一舵机(7)的一端通过第二舵机(12)与机器人躯干(4)固定连接,另一端经连接杆(8)和轴承(9)与腿杆(11)连接。
8.根据权利要求7所述的分体式自适应环境智能侦测机器人,其特征在于,腿杆(11)的底部设置有足底(10)。
9.根据权利要求8所述的分体式自适应环境智能侦测机器人,其特征在于,足底(10)为半球形结构。
10.根据权利要求1所述的分体式自适应环境智能侦测机器人,其特征在于,无人机采用无线通信或北斗导航与四足机器人连接。
技术总结本技术公开了一种分体式自适应环境智能侦测机器人,包括四足机器人和无人机,无人机用于获取机器人视角受限下的前行道路路况信息,四足机器人包括机器人躯干,以及对称设置在机器人躯干两侧的机器人足,机器人躯干的前后两端分别设置有摄像头,机器人躯干的顶部设置有无人机停机舱,无人机位于无人机停机舱内,无人机和四足机器人之间通过无线通信与北斗导航连接,四足机器人和无人机分别连接电池。本技术结合了四足机器人与无人机二者各自的优点,使得机器人整体抗干扰和避障能力加强,行动更加灵活,并在一定程度上扩大了探测范围和探测精度。技术研发人员:路锐行,林海,冯英镔,严毅航,程荣荣,白镇赫,李童尧,沈成硕,章煜,董媛,王博受保护的技术使用者:长安大学技术研发日:20231201技术公布日:2024/6/26本文地址:https://www.jishuxx.com/zhuanli/20240722/228431.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表