一种轻量化全肘式四足机器人的制作方法
- 国知局
- 2024-08-01 07:58:09
本发明涉及机器人,特别是涉及一种轻量化全肘式四足机器人。
背景技术:
1、常见的步行机器人以两足机器人、四足机器人、六足机器人应用较多。其中,四足机器人因结构简单且动作灵活、承载能力强、稳定性好等优势,在抢险救灾、探险、娱乐及军事等许多方面有很好的应用前景,其研制工作一直受到国内外的重视。近些年,四足机器人结构设计得到全面发展,从最初的被动运动结构到现在的主动运动结构,已经有相当成熟的几种结构设计方案。从灵活性角度分析,目前最灵活的结构设计方案是全肘式四足机器人结构。
2、目前,现有的全肘式四足机器人,由于控制腿部关节运动的电机设置在机壳内部,导致其散热性较差,机器人运动一段时间后,电机热量持续增加,会产生过热现象,导致电机寿命降低,甚至发生损坏。且机器人的四个腿部由于运动状态和结构位置的差异,导致温度有一定的差异,四个电机的老化程度也不同,影响腿部的运动控制精度。
技术实现思路
1、本发明的目的是提供一种轻量化全肘式四足机器人,以对控制腿部关节运动的各个电机进行散热,且对各个电机的散热程度分别进行调节,避免各个电机的老化程度不同而影响对腿部的运动控制精度。
2、为了实现上述目的,本发明采用以下技术方案:
3、本发明所述轻量化全肘式四足机器人,包括:
4、机架;
5、支腿组件,设有多个,所述支腿组件包括连接部、驱动件和支腿,所述连接部安装在所述机架上,所述连接部内具有容纳腔,所述驱动件安装在所述容纳腔内,所述支腿与所述驱动件传动连接;
6、导流壳,设有多个,多个所述导流壳分别安装于各个所述连接部上且与所述连接部内的所述容纳腔连通,所述导流壳上开设有通气口,所述导流壳内安装有用于调节所述通气口的开口大小的调节组件;
7、散热机构,安装在所述机架上,所述散热机构与各个所述导流壳的所述通气口均连接,所述散热机构用于使所述驱动件的热量经对应的所述容纳腔、所述导流壳排出。
8、优选地,所述调节组件包括:
9、遮蔽板,活动设于所述通气口处;
10、遮蔽板驱动件,与所述遮蔽板连接,所述遮蔽板驱动件用于驱动所述遮蔽板活动,以调节对所述通气口的遮蔽面积。
11、优选地,所述遮蔽板驱动件为记忆弹簧,所述记忆弹簧的一端固定在所述导流壳的内壁上,所述记忆弹簧的另一端与所述遮蔽板连接;所述遮蔽板滑动装配在所述导流壳的内壁。
12、优选地,所述调节组件还包括限位杆,所述限位杆的两端分别固定在所述导流壳的内壁上,所述记忆弹簧套设在所述限位杆的外周侧,所述遮蔽板与所述限位杆滑动连接。
13、优选地,所述遮蔽板包括相互连接的第一板件和第二板件,所述第一板件滑动装配在所述导流壳的内壁,所述第二板件滑动装配在所述限位杆上。
14、优选地,所述散热机构包括壳体、抽气扇和多个抽气管,所述壳体安装在所述机架上,所述抽气扇安装在所述壳体内,多个所述抽气管均固定在所述壳体上且与所述壳体的内部连通,多个所述抽气管分别连接各个所述导流壳的所述通气口。
15、优选地,所述机架的顶部安装有顶板,所述顶板上开设有与所述壳体内部连通的通孔,所述通孔处安装有防护网。
16、优选地,所述支腿组件还包括输出部和连接块,所述连接块的一端与所述驱动件连接,所述连接块的另一端与所述输出部连接,所述输出部伸出所述容纳腔与所述支腿连接。
17、优选地,所述连接部包括固定筒、连接板和支撑架,所述支撑架固定在所述固定筒的一端内壁,所述连接板封堵在所述固定筒的另一端,所述连接板上开设有与所述固定筒内部连通的进气口,所述连接块通过轴承转动安装在所述支撑架内。
18、优选地,所述容纳腔内设有隔板,所述隔板将所述容纳腔划分为第一容置空间和第二容置空间,所述隔板上开设有连通所述第一容置空间和所述第二容置空间的连通口,所述固定筒上开设有连通所述第一容置空间和所述导流壳的第一出气孔和连通所述第二容置空间和所述导流壳的第二出气孔。
19、本发明实施例一种轻量化全肘式四足机器人与现有技术相比,其有益效果在于:
20、本发明实施例的轻量化全肘式四足机器人,包括机架、支腿组件、导流壳和散热机构,各个支腿组件均设有对应的导流壳,在导流壳上开设通气口,并在导流壳内安装用于调节通气口的开口大小的调节组件。各个支腿组件分别通过导流壳的通气口与散热机构连接,通过驱动件驱动支腿运动,在驱动件工作过程中,驱动件的热量经对应的容纳腔、导流壳排出,从而通过散热机构同时对各个驱动件进行散热,避免驱动件产生过热现象而损坏,提高驱动件的使用寿命。并且,在散热机构对各个驱动件进行散热时,可根据各个支腿组件的运动状态、结构位置等导致的产热差异,通过调节组件对通气口的开口大小进行调节,从而调节经通气口流通的通气量,调节对对应的驱动件的热交换效果,从而提高散热机构对单个驱动件的散热效果,避免各个支腿组件的驱动件的老化程度不同而影响对腿部的运动控制精度。
技术特征:1.一种轻量化全肘式四足机器人,其特征在于,包括:
2.根据权利要求1所述的轻量化全肘式四足机器人,其特征在于,所述调节组件(4)包括:
3.根据权利要求2所述的轻量化全肘式四足机器人,其特征在于,所述遮蔽板驱动件(42)为记忆弹簧,所述记忆弹簧的一端固定在所述导流壳(3)的内壁上,所述记忆弹簧的另一端与所述遮蔽板(41)连接;所述遮蔽板(41)滑动装配在所述导流壳(3)的内壁。
4.根据权利要求3所述的轻量化全肘式四足机器人,其特征在于,所述调节组件(4)还包括限位杆(43),所述限位杆(43)的两端分别固定在所述导流壳(3)的内壁上,所述记忆弹簧套设在所述限位杆(43)的外周侧,所述遮蔽板(41)与所述限位杆(43)滑动连接。
5.根据权利要求4所述的轻量化全肘式四足机器人,其特征在于,所述遮蔽板(41)包括相互连接的第一板件(411)和第二板件(412),所述第一板件(411)滑动装配在所述导流壳(3)的内壁,所述第二板件(412)滑动装配在所述限位杆(43)上。
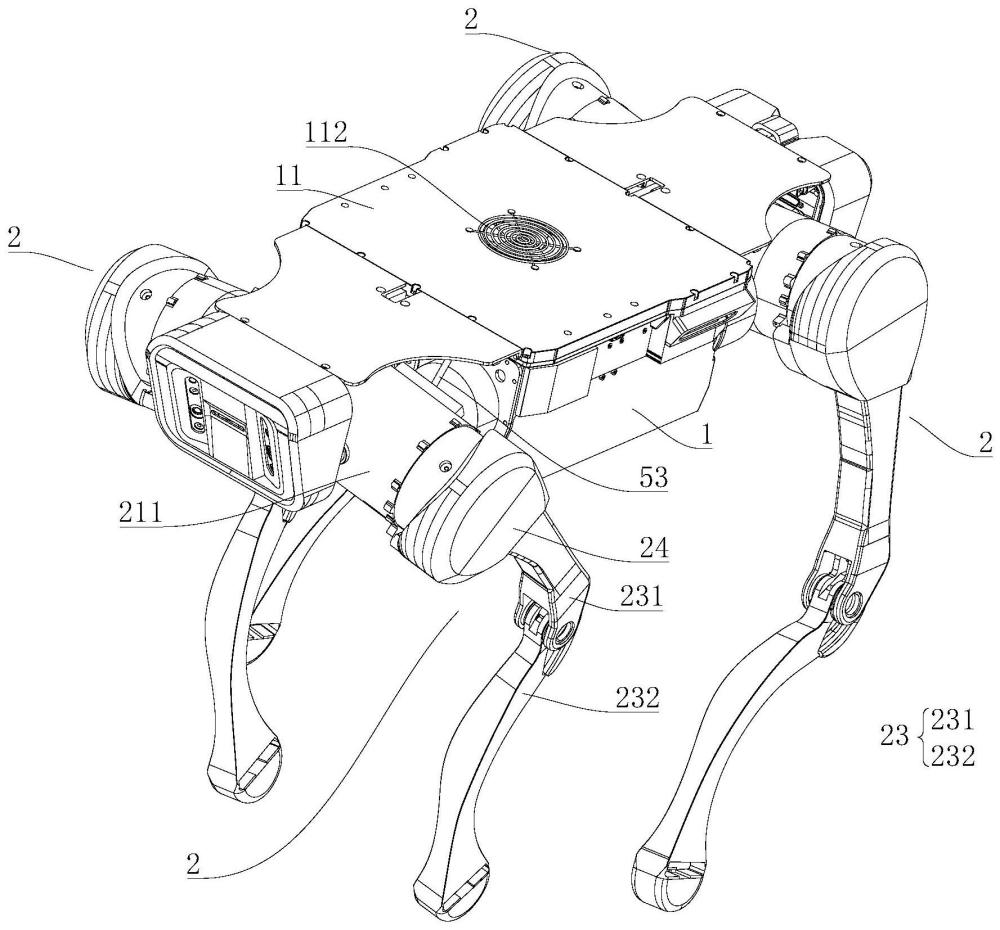
6.根据权利要求1所述的轻量化全肘式四足机器人,其特征在于,所述散热机构(5)包括壳体(51)、抽气扇(52)和多个抽气管(53),所述壳体(51)安装在所述机架(1)上,所述抽气扇(52)安装在所述壳体(51)内,多个所述抽气管(53)均固定在所述壳体(51)上且与所述壳体(51)的内部连通,多个所述抽气管(53)分别连接各个所述导流壳(3)的所述通气口(31)。
7.根据权利要求6所述的轻量化全肘式四足机器人,其特征在于,所述机架(1)的顶部安装有顶板(11),所述顶板(11)上开设有与所述壳体(51)内部连通的通孔(111),所述通孔(111)处安装有防护网(112)。
8.根据权利要求1所述的轻量化全肘式四足机器人,其特征在于,所述支腿组件(2)还包括输出部(24)和连接块(25),所述连接块(25)的一端与所述驱动件(22)连接,所述连接块(25)的另一端与所述输出部(24)连接,所述输出部(24)伸出所述容纳腔(2111)与所述支腿(23)连接。
9.根据权利要求8所述的轻量化全肘式四足机器人,其特征在于,所述连接部(21)包括固定筒(211)、连接板(212)和支撑架(213),所述支撑架(213)固定在所述固定筒(211)的一端内壁,所述连接板(212)封堵在所述固定筒(211)的另一端,所述连接板(212)上开设有与所述固定筒(211)内部连通的进气口(2121),所述连接块(25)通过轴承(2131)转动安装在所述支撑架(213)内。
10.根据权利要求9所述的轻量化全肘式四足机器人,其特征在于,所述容纳腔(2111)内设有隔板(214),所述隔板(214)将所述容纳腔(2111)划分为第一容置空间(21111)和第二容置空间(21112),所述隔板(214)上开设有连通所述第一容置空间(21111)和所述第二容置空间(21112)的连通口(2141),所述固定筒(211)上开设有连通所述第一容置空间(21111)和所述导流壳(3)的第一出气孔(2112)和连通所述第二容置空间(21112)和所述导流壳(3)的第二出气孔(2113)。
技术总结本发明涉及机器人技术领域,公开了一种轻量化全肘式四足机器人,包括机架、散热机构、多个支腿组件和多个导流壳,支腿组件包括连接部、驱动件和支腿,连接部安装在机架上,连接部内具有容纳腔,驱动件安装在容纳腔内,支腿与驱动件传动连接,驱动件用于驱动支腿运动;导流壳安装于连接部上且与容纳腔连通,导流壳上开设有通气口,导流壳内安装有用于调节通气口的开口的调节组件;散热机构安装在机架上,散热机构与各个导流壳的通气口均连接,散热机构用于使驱动件的热量经对应的容纳腔、导流壳排出。本发明可对各个驱动件同时进行散热,且可对单个驱动件的散热程度进行调节,避免各个支腿组件的驱动件的老化程度不同而影响对腿部的运动控制精度。技术研发人员:卫林林,贾轩涛,王旋,周国伟,侯贺伟,龚凌云,陈剑飞,王亚鹏,贾红光,黄养信,蔡韩奇,高子杰,鲁国飞,李伟受保护的技术使用者:国网浙江省电力有限公司超高压分公司技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/229696.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表