多模态智能感知四足仿生检测机器人及其控制方法
- 国知局
- 2024-08-01 07:58:17
本发明涉及机器人设计,特别涉及一种多模态智能感知四足仿生检测机器人及其控制方法。
背景技术:
1、伴随着科学技术的不断发展成熟,机器人无论在生活中还是在工业中,都有着越来越广泛的应用。仿生机器人是模仿生物动物的运动和行为特征,设计出具备类似能力的机器人。其中,仿生四足机器人因其灵活性高、稳定性好、容易实现全方面控制、更易避障且耗能少等特点,得到了迅速的发展。
2、而现有的四足机器人对于运动时障碍物的检测精度不足,导致其环境适应能力差,无法适用于复杂环境下的巡逻检测等工作。
3、因此,现有技术还有待改进和提高。
技术实现思路
1、鉴于上述现有技术的不足之处,本发明的目的在于提供一种多模态智能感知四足仿生检测机器人及其控制方法,旨在解决现有的四足机器人对于运动时障碍物的检测精度不足,导致其环境适应能力差的问题。
2、为了达到上述目的,本发明采取了以下技术方案:
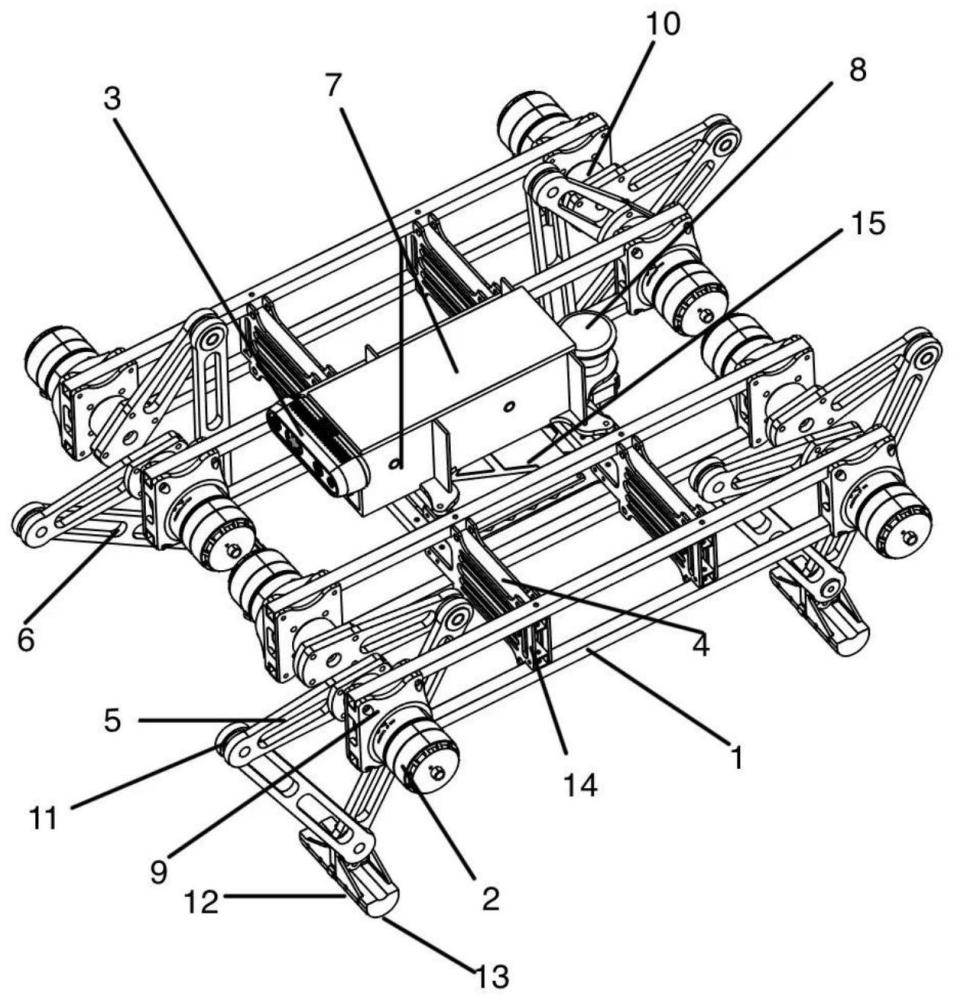
3、第一方面,一种多模态智能感知四足仿生检测机器人,包括:
4、支撑架,所述支撑架呈镂空状;
5、控制器模块,设于所述支撑架中心处;
6、供电模块,设于所述支撑架上,并位于所述控制器模块上端;
7、视觉检测模块,设于所述供电模块的一侧;
8、至少四组行走机构,呈矩阵式间隔设于所述支撑架上,并与所述控制器模块电性连接;
9、足端支撑组件,转动连接于所述行走机构远离所述支撑架的一端。
10、进一步地,所述视觉检测模块包括:
11、摄像头,设于所述供电模块的一侧;
12、控制电路板,设于所述摄像头内,并用于对所述摄像头摄取的图像进行处理。
13、进一步地,所述行走机构包括:
14、至少两个驱动电机,通过电机座连接于所述支撑架的端部;
15、大腿连杆,通过联轴器连接于所述驱动电机的驱动端;
16、小腿连杆,转动连接于所述大腿连杆的另一端,且两个小腿连杆共同转动连接有所述足端支撑组件。
17、进一步地,所述足端支撑组件包括:
18、连接架,转动连接于所述行走机构上;
19、柔性脚垫,设于所述连接架背离所述行走机构的一端,且所述柔性脚垫呈半圆柱状,所述柔性脚垫的曲面朝向地面布置。
20、进一步地,所述支撑架上还设有多个挡板,多个所述挡板呈矩阵式间隔布置。
21、第二方面,一种根据第一方面所述的多模态智能感知四足仿生检测机器人的控制方法,所述控制方法包括:
22、步骤一、获取机器人初始位置信息,并通过视觉检测模块获取实时坐标数据信息,进行预处理;
23、步骤二、基于实时坐标数据信息,获取足端轨迹坐标;
24、步骤三、基于虚拟模型控制vmc算法,对p、d参数赋值,控制机器人腿部虚拟弹力,获取机器人运动状态信息;
25、步骤四、基于打印函数,根据足端轨迹坐标和机器人运动状态信息,获取机器人运动指令,通过控制器模块发送运动指令至各行走机构处,实现机器人的运动控制。
26、进一步地,所述通过视觉检测模块获取实时坐标数据信息,进行预处理包括:
27、步骤1.1、通过摄像头实时摄取图像,对图像进行特征分析,获取图像的彩色帧和深度帧;
28、步骤1.2、基于高性能深度学习推理优化器tensorrt,建立训练模型;
29、步骤1.3、通过特征点匹配技术,对齐彩色帧和深度帧;
30、步骤1.4、将彩色帧导入训练模型,并采用批处理技术,获取实时坐标数据信息。
31、进一步地,所述通过摄像头实时摄取图像,对图像进行特征分析包括:
32、步骤1.11、通过摄像头实时摄取图像数据,对图像数据预处理形成特征图,并对特征图分组;
33、步骤1.12、通过grouped spatialconvolution对每组特征图进行卷积操作,并将输出结果合并,判断图像数据为微小物体、裂缝或障碍。
34、进一步地,基于实时坐标数据信息,获取足端轨迹坐标包括:
35、步骤2.1、基于实时坐标数据信息,获取目标位置信息,并结合目标位置信息和初始位置信息,获取目标距离信息;
36、步骤2.2、获取行走机构极限坐标信息,并根据行走机构极限坐标信息和目标距离信息获取足端轨迹坐标。
37、进一步地,所述基于虚拟模型控制vmc算法,对p、d参数赋值,控制机器人腿部虚拟弹力,获取机器人运动状态信息包括:
38、步骤3.1、机器人运动状态为小跑步态时,选择p1.0、d6.0参数,减小机器人腿部行走机构虚拟弹力;
39、步骤3.2、机器人运动状态为跳跃步态时,首先给予p0.5、d6.0参数,保证机器人为蹲下状态;然后给予p3.0、d10.0参数,使行走机构伸长时有足够的动力来进行跳跃;在空中时给予p3.0、d10.0参数,确保狗腿行走机构快速收回;在收腿后给予p0.3、d3.0参数,来确保机器人能够着陆;
40、步骤3.3、机器人运动状态为空翻步态时,第一阶段是与跳跃步态相同的下蹲,第二阶段前腿需要往前上方以圆弧形转动p0.2、d1.0来保证能慢速配合后腿的起跳,后腿起跳则需要p8.0、d20.0的有力的推动保证能够使空翻越过大多数高度的障碍,第三阶段则是前腿起跳后腿随前腿起跳向前下方做收腿转动,此时前腿p8.0、d20.0确保前腿有足够的推力推动,后腿则p1.0、d6.0后腿需要向前下方倾斜提供一个向前翻的姿态,第四阶段则是前腿收腿阶段p3.0、d10.0快速收腿,最后一阶段给予p0.3、d3.0参数,确保机器人收腿着陆。
41、本发明所采用的技术方案具有以下有益效果:
42、本申请中,行走机构采用了四杆并联机构,大大增强了机器人的稳定性和承载能力并且在足部固定了柔性脚垫,可以更好的适应户外的越野能力,视觉检测模块采用了gsconv-yolov5算法,与stm32f4控制器模块使用高速j-link进行串口通信,保证了实时数据的处理;通过结合视觉检测模块和行走机构,对行走机构进行调配控制,使得机器人能在复杂地形下避障行走或进行跳跃、空翻、自旋等,能够进行复杂的图像识别,传动简单,运动可靠,负载能力强;且适用于复杂环境下的巡逻、资源勘探、资料搜集等工作。
技术特征:1.一种多模态智能感知四足仿生检测机器人,其特征在于,包括:
2.根据权利要求1所述的多模态智能感知四足仿生检测机器人,其特征在于,所述视觉检测模块包括:
3.根据权利要求1所述的多模态智能感知四足仿生检测机器人,其特征在于,所述行走机构包括:
4.根据权利要求1所述的多模态智能感知四足仿生检测机器人,其特征在于,所述足端支撑组件包括:
5.根据权利要求1所述的多模态智能感知四足仿生检测机器人,其特征在于,所述支撑架上还设有多个挡板,多个所述挡板呈矩阵式间隔布置。
6.一种根据权利要求1所述的多模态智能感知四足仿生检测机器人的控制方法,其特征在于,所述控制方法包括:
7.根据权利要求6所述的多模态智能感知四足仿生检测机器人的控制方法,其特征在于,所述通过视觉检测模块获取实时坐标数据信息,进行预处理包括:
8.根据权利要求7所述的多模态智能感知四足仿生检测机器人的控制方法,其特征在于,所述通过摄像头实时摄取图像,对图像进行特征分析包括:
9.根据权利要求6所述的多模态智能感知四足仿生检测机器人的控制方法,其特征在于,基于实时坐标数据信息,获取足端轨迹坐标包括:
10.根据权利要求6所述的多模态智能感知四足仿生检测机器人的控制方法,其特征在于,所述基于虚拟模型控制vmc算法,对p、d参数赋值,控制机器人腿部虚拟弹力,获取机器人运动状态信息包括:
技术总结本发明公开了一种多模态智能感知四足仿生检测机器人及其控制方法,包括支撑架、控制器模块、供电模块、视觉检测模块、至少四组行走机构和足端支撑组件;本申请中,行走机构采用了四杆并联机构,大大增强了机器人的稳定性和承载能力并且在足部固定了柔性脚垫,可以更好地适应户外越野能力,视觉检测模块采用GSConv‑YoloV5算法,与STM32F4控制器模块之间使用高速J‑link完成串口通信,保证实时数据的处理;通过结合视觉检测模块和控制算法,对行走机构进行调配控制,使得机器人能在复杂地形下避障行走或进行跳跃、空翻、自旋等,能够进行复杂的图像识别,传动简单,运动可靠,负载能力强,适用于复杂环境下的巡逻、资源勘探、资料搜集等工作。技术研发人员:张国恒,黄平,金义舒,孔维签,郑福印,皇同治,郦世凯,胡博方,王孝焱,侯松志,姜志正,张宸威,胡珈玮受保护的技术使用者:沈阳工业大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/229709.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表