一种带足底反馈的四足仿生机器人
- 国知局
- 2024-08-01 07:58:32
本发明涉及四足仿生机器人,具体为一种带足底反馈的四足仿生机器人。
背景技术:
1、四足仿生机器人是一种模仿动物四肢结构和运动方式的机器人,具有四只腿,每只腿都可以独立运动以实现行走、奔跑、爬行等动作,带足底反馈的四足仿生机器人是使用传感器来监测每只脚的接触力和运动状态,传感器反馈的信息调整每只脚的运动,以保持机器人的稳定性和平衡性,四足仿生机器人具有广泛的应用前景。
2、专利号为cn216883981u的专利公开了一种四足仿生机器人,其包括机械主体和设置在机械主体四周的机械腿,机械主体为对称式结构,机械主体的两侧对称设置有四个机械腿;机械主体包括主体机身、电控装置、视觉识别摄像头和图像回传摄像头;主体机身的内部设置有电控装置;主体机身的两侧还设置有用于与机械腿连接的连接件,连接件的两侧分别为供机械腿连接的轴承卡件,视觉识别摄像头和图像回传摄像头固定在连接件的外侧。本装置将电机设置在整体的外部,便于电机的维护和更换,同时本装置的对称设置保证了整体在运动的过程中的稳定平衡,在机械主体的前端还设置有图像回传摄像头和视觉识别摄像头,能有效的将图像进行回传以便于单体的控制。
3、但是四足仿生机器人存在以下问题:该四足仿生机器人在使用时,由于在户外勘探时,路面环境恶劣,地面凹凸不平,易造成四足仿生机器人脚部支撑力不够,从而导致四足仿生机器人在户外勘探时脚部支撑力较小造成设备倾倒的问题,因此,我们提出了一种带足底反馈的四足仿生机器人。
技术实现思路
1、针对现有技术的不足,本发明提供了一种带足底反馈的四足仿生机器人,解决了上述背景技术中提出的问题。
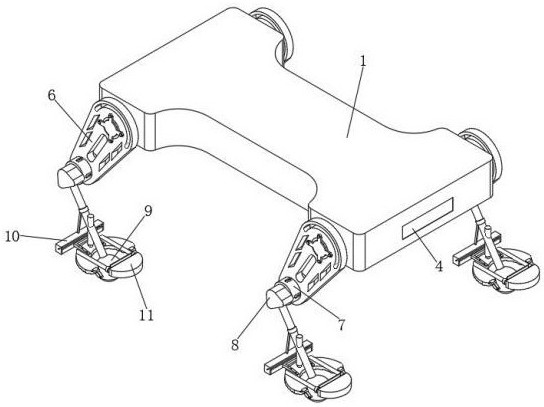
2、为实现以上目的,本发明通过以下技术方案予以实现:一种带足底反馈的四足仿生机器人,包括h形机壳,所述h形机壳正反面两边均开设有圆孔,所述h形机壳内部底端固定安装有pcb控制板,所述h形机壳内部底端固定安装有电池,所述h形机壳右侧中间贯穿且固定安装有视觉模组,所述h形机壳内部底端固定安装有四个伺服电机一,四个所述伺服电机一设置在h形机壳内部四边,所述h形机壳的四个圆孔内均转动安装有大臂,四个所述大臂正面顶部均固定有伺服电机一转轴,四个所述大臂正面底部均贯穿且固定安装有驱动模组,四个所述驱动模组包括四个散热壳和四个伺服电机二,四个所述散热壳贯穿且固定在四个大臂正面底部,四个所述散热壳内部正面固定安装有伺服电机二,四个所述伺服电机二转轴贯穿且转动安装在散热壳正面中间,四个所述驱动模组的伺服电机二转轴正面均固定有小臂,四个所述小臂均为相同设置,所述小臂底面固定有圆壳,所述圆壳内壁顶部固定安装有压力感应器,所述压力感应器底面设置有弹簧,所述压力感应器的弹簧底面固定有橡胶垫,所述橡胶垫滑动安装在圆壳内部,所述小臂外壁顶部贯穿且固定安装有电动伸缩杆,所述电动伸缩杆的伸缩端底面固定有马蹄板,所述小臂外壁顶部设置有铲平装置,所述马蹄板顶面设置有防滑装置,电动伸缩杆伸缩端带动马蹄板向下移动,马蹄板的凹槽增大与地面的摩擦面积,使四足仿生机器人的小臂脚部与地面的接触面积增加。
3、根据上述技术方案,所述马蹄板设置在圆壳左边,所述马蹄板底面开设有若干凹槽,所述马蹄板顶面设置有两个弧槽,所述马蹄板右侧两端均开设有凹槽。
4、根据上述技术方案,所述马蹄板的两个凹槽内壁均转动安装有衔接块,两个所述衔接块与马蹄板之间设置均设置有扭簧,两个所述衔接块右侧均固定有弧形弹簧条,两个所述弧形弹簧条远离衔接块的一端均固定有勾柱,两个所述勾柱右侧底部设置有勾槽,勾柱上的弧形弹簧条在弹力作用下发生形变,勾柱的勾槽牢牢的抓在底面上,使四足仿生机器人能在户外路面崎岖的地方进行爬坡。
5、根据上述技术方案,所述铲平装置包括环架,所述小臂外壁顶部固定有环架,所述环架底面固定有长方形罩,所述马蹄板顶面固定有u形块,所述u形块左侧固定有横板,所述横板左侧底部固定有倒角板,所述倒角板设置为向右下角倾斜二十度,所述横板滑动安装在长方形罩内部,横板带动倒角板左右往复移动,倒角板向左铲开凸起的地面,减少四足仿生机器人在行走时产生的抖动。
6、根据上述技术方案,所述长方形罩设置在倒角板上方,所述长方形罩正反面均开设有滑槽,所述长方形罩的两个滑槽设置为向右下角二十度,所述长方形罩滑槽内壁左侧固定有弹簧,倒角板在长方形罩中向上滑动,使长方形罩罩住倒角板。
7、根据上述技术方案,所述铲平装置还包括圆杆,所述长方形罩的两个滑槽内壁滑动安装有圆杆,所述圆杆固定在长方形罩的两个弹簧左侧,所述圆杆底面固定有u形架,所述u形架内壁底部转动安装有刷辊,所述刷辊设置在倒角板上方,刷辊在倒角板上向下滑动的过程中,在摩擦力的作用下,刷辊滚动擦除倒角板上的尘土。
8、根据上述技术方案,所述防滑装置包括两个圆柱,所述马蹄板的两个弧槽内壁均固定有圆柱,两个所述圆柱右侧固定有半弧盒,所述半弧盒底面开设有若干圆孔,所述半弧盒的若干圆孔内壁均滑动安装有钉柱,若干所述钉柱与半弧盒之间均设置有弹簧,钉柱在半弧盒中向上滑动,钉柱的弹簧在弹力作用下,将钉柱钉在冰面上。
9、根据上述技术方案,所述防滑装置还包括两个环块,两个所述圆柱外壁右侧均固定有环块,两个所述环块相对面嵌固有竖板,所述竖板右侧底部固定有斜板,所述斜板设置在半弧盒左侧下方,环块带动竖板左右往复移动,竖板带动斜板左右往复移动,使斜板阻挡冰花会向左侧溅射。
10、本发明提供了一种带足底反馈的四足仿生机器人。具备以下有益效果:
11、(1)本发明通过圆壳、压力感应器、橡胶垫、电动伸缩杆、马蹄板、衔接块和弧形弹簧条配合勾柱,在压力感应器的弹簧弹力作用下,橡胶垫踩在底面上的力通过弹簧传递到压力感应器上,电动伸缩杆伸缩端带动马蹄板向下移动,马蹄板的凹槽增大与地面的摩擦面积,使四足仿生机器人的小臂脚部与地面的接触面积增加,让四足仿生机器人四肢更稳定的在凹凸不平的地面行走,避免四足仿生机器人在户外勘探时脚部支撑力较小造成设备倾倒,并且勾柱上的弧形弹簧条在弹力作用下发生形变,勾柱的勾槽牢牢的抓在底面上,使四足仿生机器人能在户外路面崎岖的地方进行爬坡,避免四足仿生机器人在户外崎岖地方进行爬坡不便造成设备摔毁。
12、(2)本发明通过铲平装置的设置,使得环架、长方形罩、u形块、横板、倒角板、圆杆和u形架配合刷辊,横板带动倒角板左右往复移动,倒角板向左铲开凸起的地面,使四足仿生机器人的倒角板铲开凸起地面,减少四足仿生机器人在行走时产生的抖动,避免四足仿生机器人在户外凹凸不平的地面行走时产生较大抖动造成设备内部抖动损坏,倒角板在长方形罩中向上滑动,使长方形罩罩住倒角板,避免倒角板在不使用时刮伤到工作人员,并且圆杆在长方形罩的滑槽中向滑动,长方形罩的滑槽中的弹簧开始拉伸,使刷辊在倒角板上向下滑动的过程中,在摩擦力的作用下,刷辊滚动擦除倒角板上的尘土,避免四足仿生机器人中附着有尘土造成设备老化损坏。
13、(3)本发明通过防滑装置的设置,使得圆柱、半弧盒、钉柱、环块和竖板配合斜板,钉柱接触到冰面上,钉柱在半弧盒中向上滑动,钉柱的弹簧在弹力作用下,将钉柱钉在冰面上,使四足仿生机器人在冬季户外冰面上能正常行驶,避免四足仿生机器人在冰面上行驶不便造成设备打滑,并且圆柱带动环块左右往复移动,环块带动竖板左右往复移动,竖板带动斜板左右往复移动,使斜板阻挡冰花会向左侧溅射,避免四足仿生机器人在户外冰面上行走时冰花溅射设备中造成设备损坏。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229729.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。