一种转向制动液压系统及转向制动控制方法与流程
- 国知局
- 2024-08-01 07:58:33
本技术涉及拖拉机制造,尤其是涉及一种转向制动液压系统及转向制动控制方法。
背景技术:
1、拖拉机转向根据整机平台结构的形式分为前轮转向、铰接转向和全轮转向三种结构,其中前轮转向多用于无框架式拖拉机(前后轮大小不同),铰接转向多用于大马力铰接式拖拉机(前后轮大小相同),全轮转向用于个别厂家的拖拉机(前后轮大小相同)整体式车架。
2、拖拉机在处于田间作业的工况时,部分工况的转弯半径小,仅靠上述的常规转向无法实现小半径的转弯,特别是对于大型拖拉机来说,由于整机尺寸大,仅靠上述常规转向无法实现小半径转弯。
3、针对此情况,部分制动方式为在转向过程中人为干预,利用操作者脚踩制动踏板实现单边辅助制动,进而在常规转弯的过程中,实现因某侧单边辅助制动,从而辅助制动侧的轮胎处于更小转速甚至停止转动状态,而另外一侧的轮胎由于桥差速作用(桥差速作用通过让两个车轮以不同的速度旋转,来满足车辆转弯时两边车轮不同的行驶距离。在转弯时,外侧车轮需要行驶的距离更长,内侧车轮需要行驶的距离更短,从而达到满足车轮行驶距离不同的目的)使另外一侧轮胎转速加快,实现小半径转弯,甚至实现单边车辆静止,而另外侧轮胎绕静止轮胎转向的小半径转弯。而对于现有的制动方式,操作者需要较高的驾驶水平以及丰富的驾驶经验以应对田间作业中多种多样的工况,操作不当还可能产生翻车等的危险。
4、因此,需要设计一种转向制动液压系统用以解决上述问题。
技术实现思路
1、有鉴于此,为克服现有技术的缺陷,本发明提供一种转向制动液压系统及转向制动控制方法,有效地解决了边现有制动方式需要人工手动,考验操作者的驾驶水平以及容易产生安全风险的问题。
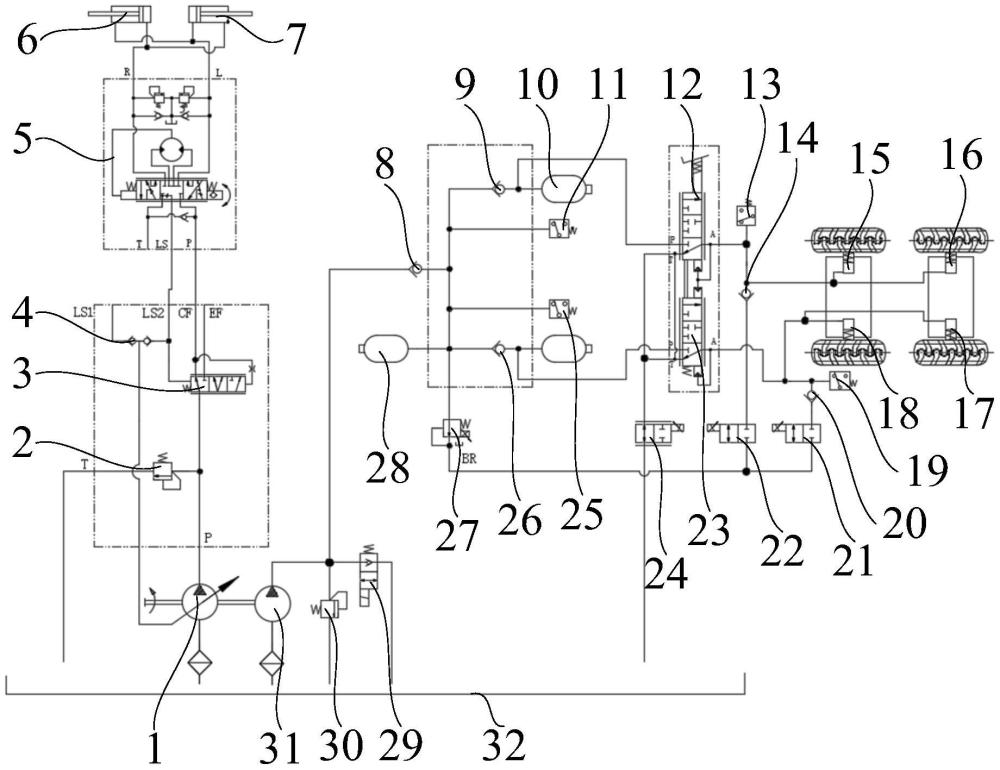
2、根据本发明的第一方面提供一种转向制动液压系统,其中,所述转向制动液压系统包括自动辅助转向系统,所述自动辅助转向系统包括制动液压模块和辅助制动转动模块,所述制动液压模块与所述辅助制动转动模块连接;所述制动液压模块包括由输出压力的自动泵、控制流向的单向阀组和使得所述拖拉机制动的制动单元,所述自动泵通过所述单向阀组与所述制动单元连接,所述自动泵能够通过所述单向阀组带动所述制动单元实现制动;所述辅助制动转动模块包括比例减压阀、电磁阀组和角度传感器,所述角度传感器设置于所述拖拉机以用于检测所述拖拉机的转向角度,所述角度传感器与所述比例减压阀连接,所述自动泵通过所述单向阀组与所述比例减压阀连接,所述比例减压阀通过电磁阀组与所述制动单元连接,通过所述角度传感器反馈的角度以使得所述比例减压阀输出不同的压力,以用于控制所述制动单元实现相对应的制动。
3、优选地,所述辅助制动转动模块还包括比例电磁阀和第一压力传感器组,所述第一压力传感器组设置于所述制动单元以用于检测压力数值,所述比例电磁阀设置于所述单向阀组和所述制动单元之间,所述比例电磁阀与所述第一压力传感器组和所述制动单元连接,通过所述第一压力传感器组反馈的数值以使得所述比例电磁阀调节输出的压力,以调节辅助制动的压力。
4、优选地,所述转向制动液压系统还包括常规转向系统和控制器,所述控制器能够使得所述拖拉机在所述常规转向系统和所述自动辅助转向系统之间切换,所述常规转向系统和所述自动辅助转向系统并行地设置;所述常规转向系统包括输出压力的变量泵、控制输出压力的转向控制单元和使得拖拉机转向的转向执行单元,所述变量泵通过所述转向控制单元与所述转向执行单元连接。
5、优选地,所述单向阀组包括第一单向阀、第二单向阀和第三单向阀,所述第二单向阀和所述第三单向阀并联,所述第二单向阀和所述第三单向阀均与所述第一单向阀串联,所述第一单向阀与所述自动泵连接;所述制动单元包括第一制动阀、第二制动阀、第一前后制动器和第二前后制动器,所述第一前后制动器通过所述第一制动阀与所述第二单向阀连接,所述第二前后制动器通过所述第二制动阀与所述第三单向阀连接。
6、优选地,所述比例减压阀与所述第二单向阀和所述第三单向阀并联,所述电磁阀组包括第一电磁阀和第二电磁阀,所述比例减压阀通过所述第一电磁阀与所述第一前后制动器连接,所述比例减压阀通过所述第二电磁阀与所述第二前后制动器连接;所述第一压力传感器组包括第一压力传感器和第二压力传感器,所述第一压力传感器与所述第一电磁阀连接,所述第二压力传感器与所述第二电磁阀连接。
7、优选地,所述单向阀组还包括蓄能器组、第二压力传感器组、第二溢流阀和卸荷阀,所述自动泵与所述第二溢流阀和所述卸荷阀连接,所述第二溢流阀和所述卸荷阀与所述蓄能器组连接,以使得所述蓄能器组开始充液或者停止充液;所述第二压力传感器组与所述蓄能器组连接,以反馈此时所述蓄能器的情况。
8、优选地,所述转向控制单元包括优先阀;所述转向执行单元包括转向器、第一转向油缸和第二转向油缸;所述变量泵通过所述优先阀与所述转向器连接,所述第一转向油缸和所述第二转向油缸并联,所述第一转向油缸和所述第二转向油缸均与所述转向器串联;所述转向控制单元还包括梭阀组,所述梭阀组设置于所述优先阀和所述转向器之前,所述梭阀组包括与所述变量泵连接用于接收负载压力的第一输入端口、能够与工作液压系统连接以便接收来自工作液压系统的反馈压力的第二输入端口以及用于将第一输入端口和第二输入端口处压力较大的一者传送到所述变量泵以控制所述变量泵工作的输出端口。
9、根据本发明的第二方面提供一种转向制动控制方法,其中,所述转向制动控制方法包括辅助制动转向模式,在处于所述辅助制动转向模式的情况下,利用角度传感器检测当前拖拉机的转向角度,设定当前的转向角度为β;设定辅助制动转向角度的阈值α,0≤α≤最大转向角度值βmax;在β≥α的情况下,电磁阀组得电,控制器控制根据当前转向角度β、设定的转向角度阈值α计算出比例减压阀需要输出的压力,压力经过电磁阀组流向制动单元,从而使得制动单元制动,限制一侧车轮的转速;根据驱动桥差速理论,2×驱动桥的输入转速=左侧车轮转速+右侧车轮转速,再限制一侧车轮转速逐渐变小直至零后,另一侧的车轮转速根据驱动桥差速理论增加,直至车轮转速增加至2×驱动桥的输入转速,进而实现比常规转向时在相同转向角度时更大的车轮转速差,实现更小的转弯半径;在转向角度β继续增大的情况下,根据辅助制动压力与转向角度之间的关系式:辅助制动压力pf=k×pmax×(β-α)/(βmax-α),pf为辅助制动压力,即比例减压阀的输出值;k为辅助制动与转向角度线性灵敏度系数,为定值;pmax为整机带辅具时根据田间工况计算出轮胎滚动阻力,再根据滚动阻力计算单侧车轮抱死时所需制动压力;β为当前转向角度;α为辅助制动转向角度阈值;βmax为最大转向角度;控制器增大比例减压阀的控制电流实现输出更大的辅助制动压力,并流向制动单元,使得单侧车轮制动,进而限制一侧车轮的转速,提高另一侧的车轮转速,实现更大的转速差,从而实现更小的转弯半径。
10、优选地,在转向角度β≥α值且β在逐渐增大的情况下,比例电磁阀得电且保持控制电流最大,比例电磁阀完全处于右位;在转向角度β由大变小的过程中且β≥α值的情况下,控制器根据辅助制动压力与转向角度之间的关系式,减小比例减压阀的控制电流,以用于输出较小的辅助制动压力,同时比例电磁阀得电且保持控制电流由当前值逐渐减小,从而使比例电磁阀处于左位与右位中间某个状态,进而打开制动器管路与油箱之间的部分通道,使制动管路的油液通过比例电磁阀的节流作用实现节流泄压,降低辅助制动压力;第一压力传感器组用于辅助检测制动压力的实际值,且用于控制比例电磁阀的电流大小的输入信号,进而控制比例电磁阀的开启幅度,实现所需的辅助制动压力;比例减压阀输出较小的辅助制动压力,并流向一侧车轮的制动器,改变制动摩擦片的滑膜压力,从而调整一侧车轮的转速,实现不同转速差的辅助制动转向。
11、优选地,所述转向制动控制方法包括能够彼此切换的辅助制动转向模式和常规转向模式,使用者能够通过与控制器连接的模式开关选择辅助制动转向模式或常规转向模式;在辅助制动转向模式的情况下,当拖拉机的整机传感器检测到使用者脚踩制动踏板的情况下,控制器判定拖拉机的整机需要制动,比例减压阀的控制电流最小,输出压力为0,比例电磁阀失电,电磁阀组失电,制动器管路内的辅助制动压力泄压,制动系统压力进入至制动单元,使得拖拉机的整车制动;在使用者脚踩制动踏板的情况下,取消辅助制动转向模式;在使用者脚脱离制动踏板,不制动的情况下,此时默认为常规转向模式,使用者能够通过与控制器连接的模式开关再次进入辅助制动转向模式。
12、根据本发明的转向制动液压系统,通过自动辅助转向系统的制动液压模块和辅助制动转动模块能够实现辅助操作者进行小半径的转弯,不需要驾驶者具有较高的驾驶经验和丰富的驾驶技巧即能够应对田间作业中多种多样的工况,保证作业安全。
13、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
本文地址:https://www.jishuxx.com/zhuanli/20240722/229730.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表