一种果园农田兼用多功能搬运机器人的制作方法
- 国知局
- 2024-08-01 07:59:14
本技术涉及机器人,特别涉及一种果园农田兼用多功能搬运机器人。
背景技术:
1、当前农业生产面临着众多问题,例如劳动力不足、成本高昂、效率低下以及资源浪费等,因此,研发设计化农业机器人的意义在于提高农业生产的质量与效率、降低人力和物力的消耗、保护环境和生态,实现农业的可持续发展。
2、但是现有的机器人大多只适合在较为平坦的路面进行移动行走,对于农田果园等地面较为泥泞或不平坦的路面不适用,易出现在地面上陷入或翻倒的风险。为此,我们提出一种果园农田兼用多功能搬运机器人。
技术实现思路
1、本实用新型的目的是提供一种果园农田兼用多功能搬运机器人,具有可以在农田中进行多种作业,从而提高农业生产的质量和效率。该机器人利用了机器学习和物联网技术,能够根据农作物的种类、生长情况和位置进行感应和导航,并根据预设的程序或指令进行合理的操作和调整。此外,它采用了六足行走模式,以适应不同的地形和环境,避免轮式或履带式机器人在泥泞或不平坦的地面上陷入或翻倒的风险的效果。
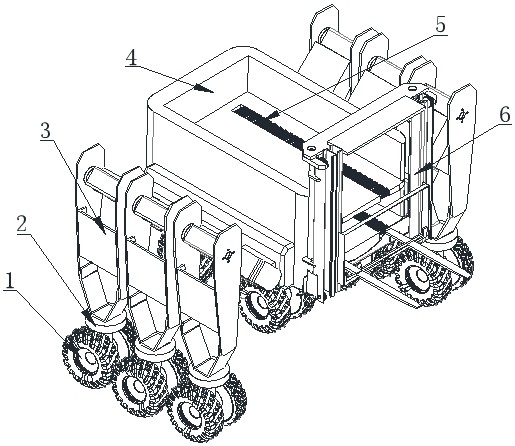
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:一种果园农田兼用多功能搬运机器人,包括机器人主体,所述机器人主体两侧的下方均安装有三个足式机构,所述足式机构的一端安装有转动盘,所述足式机构的一端通过所述转动盘安装有越野轮胎,所述机器人主体底部的四端均安装有腹部辅助轮。
3、本实用新型的进一步设置为:所述足式机构由转动连接盘、跗节、腿节、马达一、基节和马达二组成。
4、通过采用上述技术方案,所形成的足式机构,方便对越野轮胎进行翻转。
5、本实用新型的进一步设置为:所述腿节固定安装在所述跗节内侧的中间位置处,所述马达一安装在所述跗节内侧的上方,且所述马达一驱动所述跗节活动。
6、通过采用上述技术方案,控制马达一即可使得跗节活动。
7、本实用新型的进一步设置为:所述基节安装在所述马达一的一侧,所述马达二安装在所述基节的另一侧,且所述马达二驱动所述基节活动。
8、通过采用上述技术方案,控制马达二即可使得基节活动。
9、本实用新型的进一步设置为:所述转动连接盘安装在所述跗节的底端。
10、通过采用上述技术方案,进行方便越野轮胎转动。
11、本实用新型的进一步设置为:所述机器人主体的内侧设置有两层传输履带,且所述机器人主体的一侧设置有铲货架。
12、通过采用上述技术方案,进而方便对货物提起以及输送。
13、本实用新型的有益效果是:本机器人跨越复杂地形将采用六轮足式行走,在平缓地形时将降低总体高度,使用腹部辅助轮移动,这种设计增强了运行的稳定性,适当提高了整机稳定性,可以适应一些复杂环境;
14、该机器人采用轮足式动力组,面对复杂地形,足式结构随障碍物高度与地形颠簸程度,随时调整形态,使得机器人平稳跨越,同时轮式的驱动实现了效率的确保;
15、叉车与足轮驱动的结合,实现面对高度不一的货物自由调整高度时期搬运至车的同时,足轮驱动可以实现面对斜坡也保持水平状态,确保了工作时机器人的平稳性。
技术特征:1.一种果园农田兼用多功能搬运机器人,包括机器人主体(4),其特征在于:所述机器人主体(4)两侧的下方均安装有三个足式机构(3),所述足式机构(3)的一端安装有转动盘(2),所述足式机构(3)的一端通过所述转动盘(2)安装有越野轮胎(1),所述机器人主体(4)底部的四端均安装有腹部辅助轮(7)。
2.根据权利要求1所述的一种果园农田兼用多功能搬运机器人,其特征在于:所述足式机构(3)由转动连接盘(301)、跗节(302)、腿节(303)、马达一(304)、基节(305)和马达二(306)组成。
3.根据权利要求2所述的一种果园农田兼用多功能搬运机器人,其特征在于:所述腿节(303)固定安装在所述跗节(302)内侧的中间位置处,所述马达一(304)安装在所述跗节(302)内侧的上方,且所述马达一(304)驱动所述跗节(302)活动。
4.根据权利要求2所述的一种果园农田兼用多功能搬运机器人,其特征在于:所述基节(305)安装在所述马达一(304)的一侧,所述马达二(306)安装在所述基节(305)的另一侧,且所述马达二(306)驱动所述基节(305)活动。
5.根据权利要求2所述的一种果园农田兼用多功能搬运机器人,其特征在于:所述转动连接盘(301)安装在所述跗节(302)的底端。
6.根据权利要求1所述的一种果园农田兼用多功能搬运机器人,其特征在于:所述机器人主体(4)的内侧设置有两层传输履带(5),且所述机器人主体(4)的一侧设置有铲货架(6)。
技术总结本技术涉及机器人技术领域,公开了一种果园农田兼用多功能搬运机器人,包括机器人主体,所述机器人主体两侧的下方均安装有三个足式机构,所述足式机构的一端安装有转动盘,所述足式机构的一端通过所述转动盘安装有越野轮胎,所述机器人主体底部的四端均安装有腹部辅助轮。本技术具有可以在农田中进行多种作业,从而提高农业生产的质量和效率。该机器人利用了机器学习和物联网技术,能够根据农作物的种类、生长情况和位置进行感应和导航,并根据预设的程序或指令进行合理的操作和调整。此外,它采用了六足行走模式,以适应不同的地形和环境,避免轮式或履带式机器人在泥泞或不平坦的地面上陷入或翻倒的风险的效果。技术研发人员:刘羊,林小卫,吴丽红,王鼎仁,张福英,柯德慰,李信平,张政,郑于海,刘梦兰受保护的技术使用者:浙江广力工程机械有限公司技术研发日:20240201技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240722/229783.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表