一种全自动牵引式AGV的制作方法
- 国知局
- 2024-08-01 08:14:50
本技术涉及agv,更具体地说,涉及一种全自动牵引式agv。
背景技术:
1、agv即“自动导引运输车”,是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,agv通常以蓄电池为原动力,并装有非接触导引装置和其他自控系统。
2、目前,在自动仓储车间内,经常使用到牵引车来对仓储物品进行牵引运输,现有技术中,牵引车结构复杂,在使用的过程中,agv牵引车的稳定性差,对地面的平整度要求高,不适合在路面不平的环境下运作,而且车间内的地面上经常会散落垃圾,或者包装袋,或者其他杂物,很容易使牵引车受到晃动,从而对牵引的物品受到影响,容易引起牵引物品歪倒损坏的现象发生,从而浪费资源和成本。同时,一般的agv需要人工将货物挂载上,或者运输到目的地后需要等待人工卸载后,才可以开始下一项运输任务,工作效率降低,增加成本。
技术实现思路
1、本实用新型的目的在于提供一种全自动牵引式agv,用以解决上述背景技术中存在的技术问题。
2、本实用新型技术方案一种全自动牵引式agv,包括车体、设置在所述车体上的安全防护装置、导航装置、牵引装置和操控装置;所述安全防护装置设置在所述车体前方,所述导航装置设置在所述车体上方,所述牵引装置设置在所述车体后方;
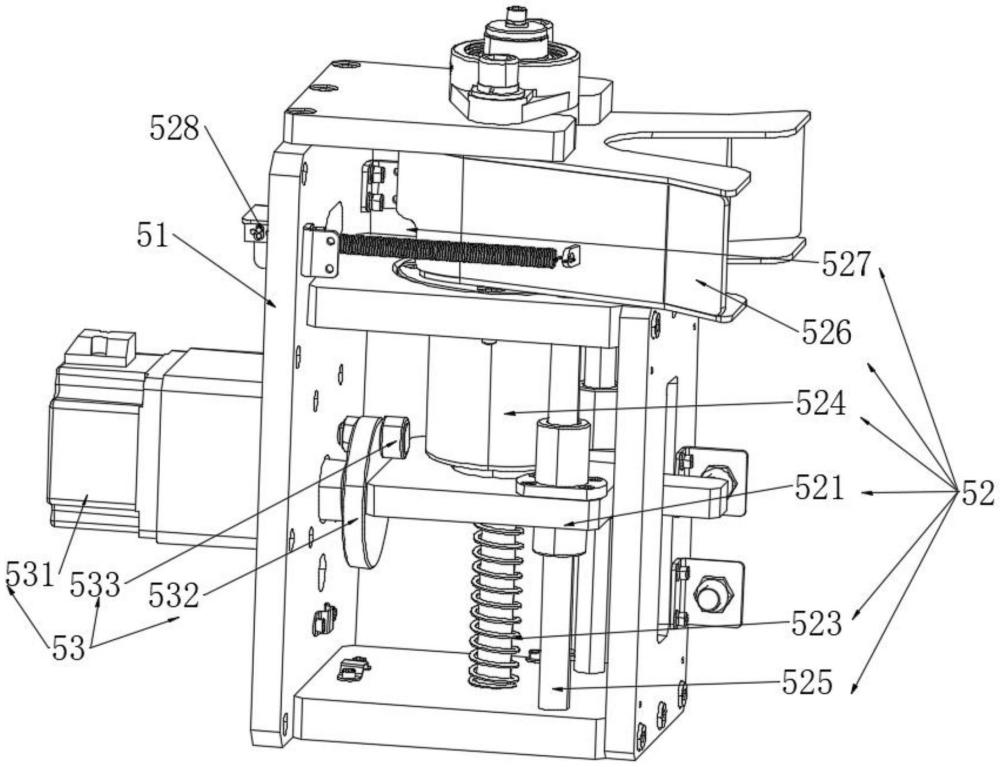
3、所述牵引装置包括安装架、设置在所述安装架上的牵引组件、用于驱动所述牵引组件升降的驱动组件,以及用于监测所述牵引组件升降停止位点的监测组件,所述导航装置控制agv到达牵引位点,所述驱动组件驱动所述牵引组件上升和下降实现与被牵引件的套接和分离。
4、在一个优选地实施例中,所述牵引组件包括安装座、设置在所述安装座上的牵引柱、位于所述安装座下方的复位弹簧,以及用于对所述牵引柱的升降进行限位的限位组件,所述驱动组件驱动所述安装座升降。
5、在一个优选地实施例中,所述牵引柱上侧且位于所述牵引柱外设置有一卡板,所述卡板呈y形开口,所述卡板上与所述y形开口相对侧设置有检测口,所述安装架上设置有一探货检测光电开关,所述探货检测光电开关与所述检测口相对设置。
6、在一个优选地实施例中,所述限位组件包括设置在所述牵引柱外且与安装架固定连接的限位套、贯穿所述安装座设置的限位柱,其中一个所述限位柱穿过所述复位弹簧设置,所述限位柱与所述安装座滑动连接,所述牵引柱与所述限位套滑动连接。
7、在一个优选地实施例中,所述驱动组件包括电机、与所述电机的输出轴连接的转盘和固定在所述转盘上的压块,所述压块偏心设置在所述转盘上,且位于所述安装座上方。
8、在一个优选地实施例中,所述安装架设置有一腰型槽,所述安装座上设置有一延伸块,所述延伸块穿过所述腰型槽设置,所述监测组件包括呈上下设置在所述腰型槽外的上限位接近开关和下限位接近开关,所述延伸块在移动过程依次与所述上限位接近开关和下限位接近开关相对。
9、在一个优选地实施例中,所述安全防护装置包括右激光避障雷达、左激光避障雷达、安全触边、左急停开关、右急停开关、语音报警器和三色指示灯。
10、在一个优选地实施例中,所述导航装置包括导航支架和固定在所述导航支架上的激光导航雷达;
11、在一个优选地实施例中,所述操控装置包括操作按钮总成、触摸屏、操作手柄和工控机天线。
12、本实用新型技术方案的有益效果是:
13、1.在进行牵引时,agv调度系统调度agv移动至牵引位置,驱动组件控制牵引组件上升,完成对被牵引件的套接,然后,agv牵引货物并将其输送至指定位点,此时驱动组件驱动牵引件下降,使其与被牵引件分离。上述过程通过导航装置进行导航,以确定到达设定位置。通过控制agv小车实现自动套接和解除,无需等待人工操作,使得货物运输更加快速、准确、高效,降低人工成本。
14、2.牵引组件升降灵活,配合检测组件、限位组件和驱动组件可实现对被牵引件的顺利固定和分离,牵引工作自动化程度高。
技术特征:1.一种全自动牵引式agv,其特征在于:包括车体、设置在所述车体上的安全防护装置、导航装置、牵引装置和操控装置;所述安全防护装置设置在所述车体前方,所述导航装置设置在所述车体上方,所述牵引装置设置在所述车体后方;
2.根据权利要求1所述的一种全自动牵引式agv,其特征在于:所述牵引组件包括安装座、设置在所述安装座上的牵引柱、位于所述安装座下方的复位弹簧,以及用于对所述牵引柱的升降进行限位的限位组件,所述驱动组件驱动所述安装座升降。
3.根据权利要求2所述的一种全自动牵引式agv,其特征在于:所述牵引柱上侧且位于所述牵引柱外设置有一卡板,所述卡板呈y形开口,所述卡板上与所述y形开口相对侧设置有检测口,所述安装架上设置有一探货检测光电开关,所述探货检测光电开关与所述检测口相对设置。
4.根据权利要求2所述的一种全自动牵引式agv,其特征在于:所述限位组件包括设置在所述牵引柱外且与安装架固定连接的限位套、贯穿所述安装座设置的限位柱,其中一个所述限位柱穿过所述复位弹簧设置,所述限位柱与所述安装座滑动连接,所述牵引柱与所述限位套滑动连接。
5.根据权利要求2所述的一种全自动牵引式agv,其特征在于:所述驱动组件包括电机、与所述电机的输出轴连接的转盘和固定在所述转盘上的压块,所述压块偏心设置在所述转盘上,且位于所述安装座上方。
6.根据权利要求2所述的一种全自动牵引式agv,其特征在于:所述安装架设置有一腰型槽,所述安装座上设置有一延伸块,所述延伸块穿过所述腰型槽设置,所述监测组件包括呈上下设置在所述腰型槽外的上限位接近开关和下限位接近开关,所述延伸块在移动过程依次与所述上限位接近开关和下限位接近开关相对。
7.根据权利要求1所述的一种全自动牵引式agv,其特征在于:所述安全防护装置包括右激光避障雷达、左激光避障雷达、安全触边、左急停开关、右急停开关、语音报警器和三色指示灯。
8.根据权利要求1所述的一种全自动牵引式agv,其特征在于:所述导航装置包括导航支架和固定在所述导航支架上的激光导航雷达。
9.根据权利要求1所述的一种全自动牵引式agv,其特征在于:所述操控装置包括操作按钮总成、触摸屏、操作手柄和工控机天线。
技术总结本技术公开了一种全自动牵引式AGV,包括车体、设置在所述车体上的安全防护装置、导航装置、牵引装置和操控装置;所述安全防护装置设置在所述车体前方,所述导航装置设置在所述车体上方,所述牵引装置设置在所述车体后方;所述牵引装置包括安装架、设置在所述安装架上的牵引组件、用于驱动所述牵引组件升降的驱动组件,以及用于监测所述牵引组件升降停止位点的监测组件。通过控制AGV小车实现自动套接和解除,无需等待人工操作,使得货物运输更加快速、准确、高效,降低人工成本。技术研发人员:姜跃君,王焘受保护的技术使用者:安歌科技(六安)有限公司技术研发日:20231225技术公布日:2024/7/15本文地址:https://www.jishuxx.com/zhuanli/20240722/230890.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表