一种轮履式机器人小车的制作方法
- 国知局
- 2024-08-01 08:18:51
本技术涉及工程机器人设备,尤其涉及一种轮履式机器人小车。
背景技术:
1、轮履式机器人小车用途广泛,例如,可以用于自动巡检,如监测生产线、设备、管道等,以及在危险区域进行无人值守的自动巡检;用于侦查探测,如在消防、救援等领域,通过搭载不同的传感器和设备,可以探测温度、气体浓度、声音等,以及进行图像采集和传输;以及用于自动搬运等等方面。轮履式机器人小车既具有工程机械的大功率、多功能、适用范围广的优点,又具有机器人的灵活移动、环境感知、智能识别等各种功能。
2、在复杂地形中,轮履式机器人小车需要轮胎和履带切换行进,以提高行进效率。目前,轮履式机器人小车使用的轮履转换部件大致分为两种,一种具有复杂机械结构;另一种为采用的人工更换履带或者车轮。复杂的机械结构,会带来检修成本大大提高,降低使用效率。采用人工更换,降低了车辆的有效工作时长,也存在人为参与带来的误操作等风险。
3、因此,亟需要一种轮履式机器人小车,以解决上述存在的技术问题。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本实用新型提供一种轮履式机器人小车,其解决了目前轮履式机器人小车轮履转换结构复杂、转换效率低的技术问题。
3、(二)技术方案
4、为了达到上述目的,本实用新型采用的主要技术方案包括:
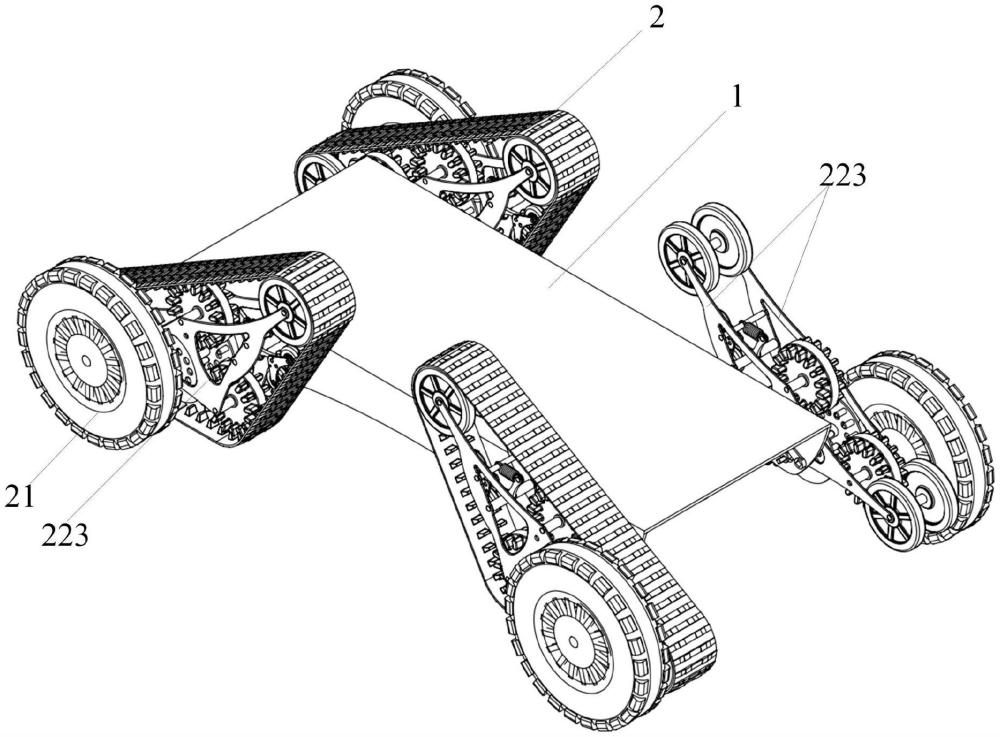
5、第一方面,本实用新型实施例提供一种轮履式机器人小车,包括车体、轮履组件和转换组件;四个所述轮履组件对称设置在所述车体行进方向的两侧,每个所述轮履组件包括能够独立行走的车轮和履带行走机构;所述转换组件包括驱动部和传动部,所述传动部同时连接所述驱动部和四个所述轮履组件,所述驱动部驱动所述传动部双向转动,以带动四组所述轮履组件绕所述车体的宽度方向双向翻转,以使所述轮履组件中的所述车轮和履带行走机构择一接地行走,并且四个所述轮履组件接地行走的部位相同。
6、可选地,所述的轮履式机器人小车,所述履带行走机构包括履带和支承所述履带运行轨迹的齿轮组件,所述履带的运行轨迹为三角形;所述车轮设置在所述履带行走机构行走方向的一侧;所述传动部双向转动,以带动所述履带行走机构以所述履带的第一拐点为支点呈指定角度双向翻转,当所述轮履组件翻转至位于所述第一拐点一侧的所述履带接地行走时,所述车轮被抬升离地,当所述轮履组件翻转至位于所述第一拐点另一侧的所述车轮接地行走时,所述履带被抬升离地。
7、可选地,所述的轮履式机器人小车,位于所述车体行进方向同一侧的两个所述轮履组件呈对称分布;所述转换组件设置在所述车体的下方;所述传动部包括第一传动杆和两个第二传动杆;所述第一传动杆沿所述车体行进方向设置;两个所述第二传动杆垂直设置于所述第一传动杆的两端;所述第二传动杆的两个端部对应连接于位于所述车体行进方向两侧的两个所述履带行走机构的中部;所述驱动部驱动所述第一传动杆双向转动,所述第一传动杆带动两个所述第二传动杆双向同步转动,以带动位于所述车体行进方向同一侧的两个所述履带行走机构同步相对或相背翻转,带动位于所述车体行进方向两侧的两个所述履带行走机构同步同向翻转,进而切换所述车轮和所述履带择一着地行走。
8、可选地,所述的轮履式机器人小车,所述履带行走机构设置在所述车轮和所述车体之间;所述齿轮组件包括齿轮组和两个支架;所述齿轮组设置于相对设置的两个支架之间;所述传动部还包括连杆机构;所述连杆机构绕所述第二传动杆的端部设置,其一端固定接于所述第二传动杆的端部,另一端铰接于靠近所述车体一侧的所述支架;所述第二传动杆带动所述连杆机构绕所述第二传动杆延伸方向转动,以带动所述履带行走机构翻转。
9、可选地,所述的轮履式机器人小车,所述连杆机构依次包括第一连杆、第二连杆和第三连杆;所述第二连杆的两端分别铰接所述第一连杆与所述第三连杆;所述第一连杆的自由端固定连接于所述第二传动杆的端部;所述第二连杆和所述第三连杆的铰接点与所述支架连接;所述第三连杆的自由端铰接于所述支架的中部。
10、可选地,所述的轮履式机器人小车,所述转换组件还包括两个护板和限位杆;两个所述护板相对分布在所述车体的两侧,且所述护板位于所述连杆机构和所述履带行走机构之间;所述护板对应所述第二连杆和所述第三连杆的铰接点移动轨迹的位置设置有弧形通孔;所述限位杆一端固定于所述第二连杆和所述第三连杆的铰接点朝向所述支架的一侧,另一端垂直固定于所述支架上;所述限位杆穿过所述弧形通孔。
11、可选地,所述的轮履式机器人小车,所述指定角度为40-80°;所述弧形通孔对应的圆心角等于所述指定角度。
12、可选地,所述的轮履式机器人小车,所述齿轮组包括轴向均垂直于所述支架的主动轮、第一从动轮、第二从动轮、第一导向轮和第二导向轮;所述第一从动轮设置于所述履带的所述第一拐点,且与所述履带啮齿配合;所述第一导向轮和所述第二导向轮对应设置于所述履带的另外两个拐点处,与所述第一从动轮围成三角形;所述第一导向轮与所述第一从动轮之间的所述履带用于接地行走;所述第二从动轮设置于所述第一导向轮和所述第二导向轮之间,且与所述履带啮齿配合;所述主动轮啮齿配合设置在所述第一从动轮和所述第二从动轮之间;所述第三连杆的自由端转动接于所述支架的位置位于所述主动轮的轴线上。
13、可选地,所述的轮履式机器人小车,所述齿轮组还包括轴向垂直于所述支架的第三从动轮;所述第三从动轮设置在所述第二导向轮和所述主动轮之间,且与所述主动轮啮齿配合;所述车轮与所述第三从动轮同轴设置在所述支架上。
14、可选地,所述的轮履式机器人小车,还包括减震组件;所述减震组件设置于两个所述支架之间;所述减震组件包括减震轮、减震件和异形杆;所述减震轮连接于所述异形杆的一端,通过所述异形杆的中部铰接在两个所述支架之间;所述减震轮的轴线平行于所述车轮的轴线,且所述减震轮滚动接触于用于接地行走的所述履带的内侧;所述减震件一端固定于两个所述支架之间,另一端连接所述异形杆的自由端;所述异形杆受力拉伸或挤压所述减震件;所述异形杆为两个杆体呈钝角相接。
15、(三)有益效果
16、本实用新型的有益效果是:本实用新型的一种轮履式机器人小车,由于采用在车体下部设置驱动部和传动部,传动部同时连接驱动部和四组轮履组件,驱动部驱动传动部转动,以带动四组轮履组件绕其轴向往复翻转,以使轮履组件中的车轮和履带行走机构相互切换,相对于现有技术而言,其可以采用独立于小车的驱动部,简化了轮履转换相关部件的结构,控制更准确,降低了轮履转换过程的故障率。
17、传动部通过传动杆和连杆机构,同步反向实现四组轮履组件的翻转,进而实现轮履转换过程,进一步简化了转换组件的结构。
18、通过在履带行走机构的内部下端设置减震轮和减震件,当履带经过崎岖路面时,减震轮上下跳动带动减震件伸缩活动,降低履带行走机构的颠簸,延长履带使用寿命。
技术特征:1.一种轮履式机器人小车,其特征在于,包括车体(1)、轮履组件(2)和转换组件(3);
2.如权利要求1所述的轮履式机器人小车,其特征在于:
3.如权利要求2所述的轮履式机器人小车,其特征在于:
4.如权利要求3所述的轮履式机器人小车,其特征在于:
5.如权利要求4所述的轮履式机器人小车,其特征在于:
6.如权利要求5所述的轮履式机器人小车,其特征在于:
7.如权利要求6所述的轮履式机器人小车,其特征在于:
8.如权利要求5所述的轮履式机器人小车,其特征在于:
9.如权利要求8所述的轮履式机器人小车,其特征在于:
10.如权利要求4所述的轮履式机器人小车,其特征在于:
技术总结本技术涉及一种轮履式机器人小车,包括车体、轮履组件和转换组件;四个所述轮履组件对称设置在所述车体行进方向的两侧,每个所述轮履组件包括能够独立行走的车轮和履带行走机构;所述转换组件包括驱动部和传动部,所述传动部同时连接所述驱动部和四个所述轮履组件,所述驱动部驱动所述传动部双向转动,以带动四组所述轮履组件绕所述车体的宽度方向双向翻转,以使所述轮履组件中的所述车轮和履带行走机构择一接地行走,并且四个所述轮履组件接地行走的部位相同。采用独立于小车的驱动部,简化了轮履转换相关部件的结构,控制更准确,降低了轮履转换过程的故障率。技术研发人员:李心宏,孙鹏,卢世健,孙英楠,张晴,王文索,吕舜,王锴明,李冠邑,吴晓,杨宇航,周传奇,段嘉麟,李星彤受保护的技术使用者:红塔辽宁烟草有限责任公司沈阳卷烟厂技术研发日:20231225技术公布日:2024/7/18本文地址:https://www.jishuxx.com/zhuanli/20240722/231121.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
变轴距磁吸爬壁机器人
下一篇
返回列表