一种基于纳米磁编辑的石墨烯微机器人及其制备与应用
- 国知局
- 2024-07-27 12:54:57
本发明属于微纳器件,具体涉及一种基于纳米磁编辑的石墨烯微机器人及其制备与应用。
背景技术:
1、随着微纳制备技术的不断进步,微机器人技术得到了快速发展,其在体内医疗方面的主要用途是微创手术、靶向药物治疗和疾病监测等等。对于应用于微创手术及靶向药物输送的磁驱动微机器人而言,微机器人可以通过无线方式进行驱动和控制,在微创手术及靶向药物输送领域具有非常大的应用前景。
2、尽管国内外研究人员已经提出了诸多可变形微机器人分别用于微创手术和靶向药物输送,但鲜有将两种功能集合于一体用于医疗诊治之中。因为多种功能的集成需要微纳机器人更加智能,受控,在外界刺激下能受响应并具有多种变形形状。但基于目前材料设计与制备。很难在数十微米尺度制备出智能的具有多种变形形态的微机器人。
3、针对以上问题,有必要基于提高微机器人的变形能力和智能性结合其微创手术及靶向货物、药物输送方面的医疗应用,基于新的制备方法,设计一种新型的、可智能编辑多种形状的微机器人。要制备智能微机器人,新的基于半导体工艺的微机器人释放工艺必不可少。
技术实现思路
1、本发明的目的在于提供一种具有多种变形形态的石墨烯微机器人及其制备方法和应用。
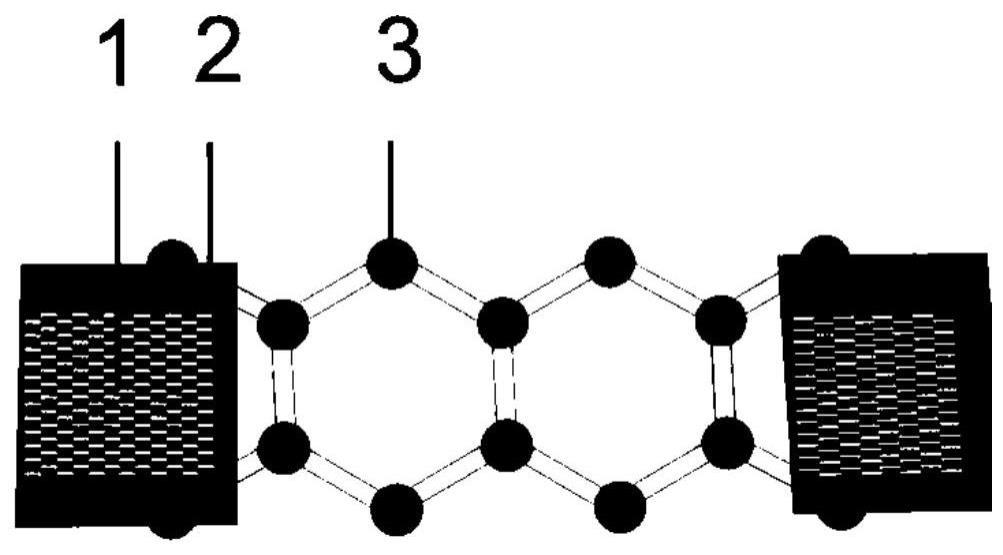
2、本发明提供的石墨烯微机器人,是基于纳米磁编辑技术的,包括:两个或多个(即两个以上)纳米磁编辑阵列,分别覆盖在两个或多个纳米磁编辑阵列上的硬块层,连接在两个或多个硬块层之间柔软石墨烯铰链,参见图1所示。其中,纳米磁编辑阵列是重复排列的单畴磁体组成的5-20 μm的阵列,通过外加磁场进行磁编辑定义微机器人的形状;在外部特定磁场下,基于纳米磁编辑的微机器人可以在石墨烯铰链处发生变形,导致整个微机器人发生目标变形行为。
3、所述两个或多个纳米磁编辑阵列,分别由两种或多种不同长宽比的纳米磁体单元组成,纳米磁体单元呈类标准田径场的长方形状;纳米磁体单元长度为300-600 nm,宽度为60-140 nm;厚度为40-100 nm。
4、所述纳米磁编辑阵列的材料为三个维度在60-600 nm尺度的单畴磁体。
5、所述纳米磁编辑阵列,是将搭载有纳米磁阵列的样品置于磁场中,沿着纳米磁棒长轴的方向,施加特定的磁场,对纳米磁阵列进行磁编辑而得到。这里,所述施加特定的磁场对纳米磁阵列进行磁编辑,具体为:由于纳米磁体按照其不同的几何形状,具有不同的矫顽力大小;故对纳米磁体阵列施加特定磁场并对其进行磁化时,是按照微机器人的总体磁化构型设计,首先磁化高矫顽力的纳米磁体阵列(即施加超过高矫顽力大小的磁场,对其进行磁化),然后再磁化低矫顽力的纳米磁体阵列(施加高于低矫顽力大小、但不超过高矫顽力的磁场,对其进行磁化)。
6、所述的纳米磁阵列由在旋转磁场、梯度磁场和静磁场以及三者的组合磁场下可响应的磁性材料制备而成。
7、所述的纳米磁阵列选自铁磁性材料co、cr、ni、al等。
8、所述的磁性材料包括在纳米尺度具有单畴磁性性质的一种或更多种。
9、所述的硬块层,呈长方形或正方形薄膜,总厚度不超过100 nm,如厚度为50-100nm。
10、所述硬块层材料选自cr、al、au等。
11、所述石墨烯铰链,由单层石墨烯制备而成,其厚度为单个原子层(<1 nm),连接两块硬板层的石墨烯铰链长为5-100 μm。
12、本发明还提供基于纳米磁编辑的石墨烯微机器人的制备方法,具体是,先在石墨烯表面制备出纳米磁阵列,对纳米磁阵列进行磁编辑,再在纳米磁编辑阵列上覆盖上硬块层,最后将石墨烯刻蚀成石墨烯铰链,最后将微机器人释放到工作环境中。其中:
13、纳米磁阵列的制备方法为:利用电子束曝光制备出重复单一的纳米磁图样形成阵列,显影得到纳米磁阵列图案后,通过电子束蒸发蒸镀上所需的磁性材料,经过lift-off金属剥离处理后得到纳米磁阵列;
14、对纳米磁阵列进行磁编辑的方法为,是将纳米磁阵列的样品置于磁场中,沿着纳米磁棒长轴的方向,施加特定的磁场,对纳米磁阵列进行磁化,使之具有特定的磁化构型,从而定义微机器人的变形行为;
15、所述施加特定的磁场对纳米磁阵列进行磁化,具体为:首先磁化高矫顽力的纳米磁体阵列,即施加超过高矫顽力大小的磁场,对其进行磁化;然后再磁化低矫顽力的纳米磁体阵列;即施加高于低矫顽力大小、但不超过高矫顽力的磁场,对其进行磁化;
16、硬块层的制备方法为:在纳米磁编辑阵列制备完成后,经过图案对准的制版操作,得到硬块层的图案,再通过电子束蒸发镀上所需的硬块层材料,经过lift-off金属剥离处理后得到硬块层;
17、石墨烯铰链制备方法为:通过对准硬块层通过制版操作得到石墨烯层的光刻胶图案,采用离子束刻蚀将多余的石墨烯刻掉后洗掉光刻胶,得到石墨烯铰链;
18、微机器人从基底释放到工作环境中的方法为:微机器人制备好后,通过旋涂pva水溶性牺牲层,pmma a4保护层和紫外光刻胶,通过紫外光刻或是激光直写做出保护层形状,通过干法刻蚀将不需要的部分除去,再通过xef2干法刻蚀使微机器人脱离衬底,最后通过微操作台将微机器人释放到工作环境;该释放工艺在制备其他器件时也可使用;是一种全新的与半导体工艺适配的释放工艺。
19、本发明还提供基于纳米磁编辑的石墨烯机器人作为体内靶向运输货物的应用。具体方式为,当纳米磁编辑的石墨烯机器人在特定磁场中时,经过磁编辑的纳米磁阵列带动石墨烯发生变形,造成微机器人的变形,并通过变形捕获微货物,在磁场指引下微机器人到达指定位置后,再通过特定磁场的变化,引起微机器人的形变来释放微货物,实现定点运输微货物的功能。
20、本发明还涉及一种微货物运输装置,该微货物运输装置含所述的基于纳米磁编辑的石墨烯机器人。
21、与现有技术相比,本发明具有以下特点:
22、(1)本发明中,微机器人的释放工艺不仅可用于石墨烯微机器人的释放,也可用于与半导体制备兼容的其他微机器人的释放,最关键的步骤是使用了pva水溶性牺牲层,pmma防水层,光刻胶掩膜层以及干法刻蚀方法;
23、(2)本发明中,纳米磁阵列是重复排列的单畴磁体组成的阵列,可以通过外加磁场进行磁编辑定义微机器人的形状;在外部特定磁场下,基于纳米磁编辑的微机器人可以在石墨烯铰链处发生变形,导致整个微机器人发生目标变形行为;
24、(3)本发明中纳米磁阵列和石墨烯铰链可以组合出各种形状结构,纳米磁阵列不仅作为驱动部件,响应外加磁场,具备驱动整个微机器人的功能,又作为功能单元,通过实时的磁场调制改变微机器人的形状;本发明利用自驱动石墨烯微机器人在纳米磁编辑下可实现多种变形形态的特点,实现了微货物的定点运输,过程可控,生物相容,且多种变形形状在体内微纳治疗领域有重要应用前景。
技术特征:1.一种基于纳米磁编辑的石墨烯微机器人,其特征在于,包括:两个或多个纳米磁编辑阵列,分别覆盖在两个或多个纳米磁编辑阵列上的硬块层,连接在两个或多个硬块层之间柔软石墨烯铰链;其中,纳米磁编辑阵列是重复排列的单畴磁体组成的5-20 μm的二维阵列,通过外加磁场进行磁编辑定义微机器人的形状;在外部特定磁场下,基于纳米磁编辑的微机器人在石墨烯铰链处发生变形,导致整个微机器人发生目标变形行为;
2.根据权利要求1的所述石墨烯微机器人,其特征在于,所述纳米磁编辑阵列的材料为三个维度在60-600 nm尺度的单畴磁体。
3.根据权利要求1的所述石墨烯微机器人,其特征在于,所述纳米磁编辑阵列是将搭载有纳米磁阵列的样品置于磁场中,沿着纳米磁棒长轴的方向,施加特定的磁场,对纳米磁阵列进行磁编辑而得到;所述施加特定的磁场对纳米磁阵列进行磁编辑,具体是按照微机器人的总体磁化构型设计,首先磁化高矫顽力的纳米磁体阵列,即施加超过高矫顽力大小的磁场,对其进行磁化;然后再磁化低矫顽力的纳米磁体阵列;即施加高于低矫顽力大小、但不超过高矫顽力的磁场,对其进行磁化。
4.根据权利要求1的所述石墨烯微机器人,其特征在于,所述纳米磁阵列选自铁磁性材料co、cr、ni、al。
5.根据权利要求1的所述石墨烯微机器人,其特征在于,所述的磁性材料包括在纳米尺度具有单畴磁性性质的一种或更多种。
6.根据权利要求1的所述石墨烯微机器人,其特征在于,所述硬块层为呈长方形或正方形薄膜,总厚度不超过100 nm;所述硬块层材料选自cr、al、au。
7.根据权利要求1的所述石墨烯微机器人,其特征在于,所述石墨烯铰链由单层石墨烯制备而成,其厚度为单个原子层,连接两块硬板层的石墨烯铰链长为5-100 μm。
8.一种如权利要求1-7之一所述石墨烯微机器人的制备方法,其特征在于,先在石墨烯表面制备出纳米磁阵列,对纳米磁阵列进行磁编辑,再在纳米磁编辑阵列上覆盖上硬块层,最后将石墨烯刻蚀成石墨烯铰链,最后将微机器人释放到工作环境中;其中:
9.如权利要求1-7之一所述石墨烯微机器人在体内靶向运输货物的应用;具体方式为,当纳米磁编辑的石墨烯机器人在特定磁场中时,经过磁编辑的纳米磁阵列带动石墨烯发生变形,造成微机器人的变形,并通过变形捕获微货物;在磁场指引下微机器人到达指定位置后,再通过特定磁场的变化,引起微机器人的形变来释放微货物,实现定点运输微货物的功能。
技术总结本发明属于微纳器件技术领域,具体为一种基于纳米磁编辑的石墨烯微机器人及其制备与应用。本发明微机器人包括:两个或多个纳米磁编辑阵列,覆盖在纳米磁编辑阵列上的硬块层,连接在硬块层之间柔软石墨烯铰链;纳米磁编辑阵列是由单畴磁体组成的二维阵列,通过外加磁场进行磁编辑,定义微机器人的磁化构型,控制微机器人的变形行为;在外部特定磁场下,微机器人在石墨烯铰链处发生变形,导致整个微机器人发生目标变形行为;即纳米磁阵列作为驱动部件,驱动微机器人运动,又作为功能单元通过实时磁场调制改变微机器人的形状。本发明利用石墨烯微机器人可实现微货物的定点运输,过程可控,生物相容,且多种变形形状,在体内微纳治疗领域有应用前景。技术研发人员:崔继斋,林心怡,梅永丰受保护的技术使用者:复旦大学技术研发日:技术公布日:2024/1/13本文地址:https://www.jishuxx.com/zhuanli/20240726/124116.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表