用于控制推进设备的推力组件的方法与流程
- 国知局
- 2024-07-27 13:12:32
本发明涉及推进设备的,优选地、但不限于适于或被布置成提供负载的提升和移动的竖直推进飞行器,无论该负载是由一名或多名乘客、人类或动物和/或一种或多种固体或液体货物构成,其运输将由该推进设备提供。本发明特别是涉及对这种推进设备的推力单元的改进,其被设计成赋予所述推力单元的更大响应性,并且因此赋予所述设备的姿态的非常高的稳定性以及其轨迹的高精度。本发明旨在实现起来非常简单,并且可用于最大数量的推进设备,无论是在空中、陆地或水上领域中作为主要应用还是次要应用。在本文档的其余部分中,本发明将优选地、但非限制性地被描述为应用于被布置成提供基本上竖直起飞和降落能力的飞行器或重于空气的飞行器。通过非限制性示例,这样的推进设备可以包括无人机、四旋翼直升机或八旋翼直升机或飞行设备,在文档wo 2017/174942a1中描述了其实施例示例。然而,本发明不应被认为是仅限于这些应用示例,而是可以关于任何类型的负载推进设备而使用。
背景技术:
1、这种推进设备通常包括推力单元,该推力单元包括热发动机(在下文中也称为“内燃机”)。内燃机可以包括二冲程或四冲程发动机类型的旋转轴发动机,其与机械转子联接,以提供推力矢量,即,沿给定方向的推力。在变型中,这种内燃机可以包括涡轮喷气发动机。图1示出取自文档wo 2017/174942 a1的推进设备的第一示例。可以被描述为“飞行摩托车”的推进设备10包括两个系统tsa和tsb,系统tsa和tsb例如分别包括两个推力单元12a和12b,每个推力单元提供合成推力矢量al12a和al12b。根据图1中的示例,每个推力单元配备有呈涡轮喷气发动机形式的多个内燃推力器。每个涡轮喷气发动机(例如涡轮喷气发动机12a1)可以被描述为旋转轴内燃机与机械转子联接的组合。这种涡轮喷气发动机将燃料(例如煤油或等同物)结合氧化剂(在此情况下,经由流体进入口吸入的环境空气)中包含的势能转换成动能。此动能在弹性介质中沿与气体排放射流相反的方向产生反作用力。这导致推力器的流体进入口与其射流喷嘴或排放出口12a-o之间的一定量的空气的加速,从而通过在所述射流喷嘴中膨胀而产生推力。因此,涡轮喷气发动机12a1生成其自己的推力矢量al12a1。推力单元12a的合成推力矢量al12a包括分别由组成推力单元的涡轮喷气发动机生成的推力矢量的结合。推力单元12a和12b由与平台11相互布置的支撑装置14保持,特别是使得所述推力单元12a和12b的推力矢量al12a、al12b基本上垂直于平台11取向,为简单起见,平台11可以被简化为用图1中的虚线表示的虚拟平面p11的等同物,所述平面p11是当所述空中推进设备10放置在水平支撑件上时基本上水平的平面。因此,在所述推力矢量al12a和al12b的作用下,由所述平台11承载的负载1可以被竖直地提升。在图1中的此情况下,所述负载主要包括人类乘客1。
2、根据图1中的示例,支撑装置14的布置使得这两个推力单元的所述涡轮喷气发动机有利地基本上沿着包括在平面p11内的平台11的纵向轴线al10(即,沿着从推进设备10的尾部到头部取向的轴线)布置。因此,推力单元12a和12b的所述涡轮喷气发动机的推力矢量al12a和al12b位于垂直于所述平台11(即,垂直于代表平台11的虚拟平面p11)的同一平面(为简单起见,图1中未示出)内。应注意,根据此示例,设备10的本体的重心cg10位于推力系统tsa和tsb的所述涡轮喷气发动机的流体排放出口上方。这种布置使得所述乘客1可以通过简单地倾斜其身体而引起方向(或“偏航轨迹”)的变化。根据此示例,推进设备10的推力系统tsa和tsb还分别包括布置在所述推进设备10的本体的端部(头部和尾部)处的呈电动次级推力器(在图1中的此情况下,电动涡轮机)形式的姿态校正装置19a和19b。所述姿态校正装置19a和19b分别提供平行于由推力单元12a和12b的涡轮喷气发动机共同提供的推力矢量al12a和al12b的额外推力矢量al19a和al19b。电动涡轮机19a和19b用于修改平台11的姿态。事实上,根据文档wo 2017/174942 a1,这些电动涡轮机19a和19b的动力由呈电子处理装置形式的导航或飞行控制器30使用来自乘客1的控制指令来调节,以引起姿态变化,从而致使运载工具在头部次级推力器19a的推力的强制作用下“抬头”,或者相反,使其头部在尾部次级推力器19b的推力的强制作用下“俯冲”。这种姿态变化结合由推力单元12a和12b提供的推力引起推进设备10向前或向后的水平移位。所述电动次级推力器19a和19b还可以由所述导航控制器30自动地致动,以响应于源自例如与所述导航控制器30集成在一起的惯性单元的测量数据而稳定或维持推进设备10的姿态基本上恒定。当姿态校正次级推力器19a或19b中的一者或另一者被致动时,其推力矢量al19a al19bb被添加到由推力单元12a和12b生成的推力矢量al12a和al12b。替代涡轮喷气发动机,这样的推进设备可以由例如二冲程或四冲程发动机类型的热发动机移动,从而驱动机械转子,如在文档us2,417,896中所描述。
3、图2绘示允许提升所承载负载的第二示例性空中推进设备。技术教导取自文档ep3495262 a1。这涉及包括支撑推力器的装置14的四旋翼直升机,所述支撑装置14呈四个臂的形式,这四个臂在基本上平坦的平台11上方描述(décrivant)“x”。每个臂支撑推力系统tsa、tsb、tsc、tsd,每个推力系统包括由与先前示例类似的呈涡轮喷气发动机形式的热推力器组成的推力单元12a、12b、12c、12d。为提升由平台11承载的负载(在图2中未示出),各自包括涡轮喷气发动机的四个推力单元12a、12b、12c、12d分别基本上垂直于平台11提供推力矢量al12a、al12b、al12c、al12d。为降落、而不损坏推力单元12a至12d的涡轮喷气发动机的射流喷嘴或流体排放出口,推力系统tsa、tsb、tsc和tsd的支撑装置14的臂在其相应远侧部分的水平(niveau)处有利地与可伸缩突出装置或支腿17协作。呈电子处理装置形式的导航或飞行控制器30向推力系统tsa、tsb、tsc、tsd提供推力命令。根据支撑装置14的配置和布置,推力系统的推力器的流体出口基本上定位在设备10的重心cg10的水平上方或下方。为了修改和稳定平台11的姿态,每个推力系统tsa至tsd包括分别由推力单元12a至12d提供的推力矢量al12a、al12b、al12c、al12d的校正装置19a、19b、19c、19d。装置19a至19d也由电子导航控制器30控制。
4、图3示出与根据图2的推力系统tsa的推力单元12a相关联的推力矢量的这种校正装置19a的布置。推力矢量的所述校正装置19a包括成对的偏转器引导件19a-1和19a-5,偏转器引导件19a-1和19a-5可移动地安装,更具体来说借助于相应枢转连杆19a-2和19a-6可移动地安装。所述偏转器引导件19a-1和19a-5被布置成在靠近于推力单元12a的涡轮喷气发动机12a-e的流体排放出口12a-o的区域的水平处偏转推力矢量al12a的全部或部分。因此,由偏转器引导件19a-1和19a-5组成的偏转器组件使得可以描述所述推力矢量al12a的“夹捏(pincement)”。偏转器引导件19a-1和19a-5有利地分别由成对的凸轮致动器或伺服马达致动,在图3中仅可以看到其中的致动器19a-3。因此,致动器19a-3借助于控制杆19a-4与偏转器引导件19a-1协作。致动器19a-3的凸轮的致动引起偏转器引导件19a-1围绕位于涡轮喷气发动机12a的流体排放区域上方的轴19a-2的旋转移动r,这限制致动器19a-3对于如下所需的扭矩:在偏转器引导件19a-1的关闭和打开期间克服和经受由推力单元12a的涡轮喷气发动机12a-e提供的推力矢量al12a产生的吸引(aspiration)或排斥(aurejet)。当分别与偏转器引导件19a-1和19a-5相关联的凸轮致动器(诸如致动器19a-3)引起推力矢量al12a被这些偏转器引导件的夹捏时,所述推力矢量al12a在所述偏转器引导件的下游根据特定偏转器引导件19a-1或19a-5是进入还是并不进入在涡轮喷气发动机12a-e的流体出口12a-o处排放的流而被细分成两个或三个分量al12a、al12a’、al12a”。在“打开”配置中,所述推力矢量al12a的力最大,根据打开配置,偏转器引导件19a-1和19a-5基本上定位在推力矢量al12a的轨迹之外。相反地,当两个偏转器引导件19a-1、19a-5中的一者(或两者)“夹捏”所述推力矢量时,所述偏转器引导件19a-1和19a-5的下游的所述推力矢量al12a的合成推力减小,直到其在来自涡轮喷气发动机的射流喷嘴12a-o的出口流的所述偏转器引导件19a-1和19a-5的“完全夹捏”期间被抵消。根据所述偏转器引导件19a-1和19a-5的布置,这些偏转器引导件在图3中类似于面向彼此的两个勺形或基本上由曲线组成的半圆形表面,在两个引导件19a-1和19a-5的“关闭”配置的情况下,可以产生反推力,即,与流体排放出口12a-o处的推力矢量al12a方向相反的推力矢量。凭借所述引导件的形状,可以使例如约为百分之十至百分之三十的这种反推力成为可能。事实上,这些引导件可以被分别布置成引导流体流,从而在所述引导件的出口(远侧部分)处产生沿与涡轮喷气发动机12a-e的流体排放出口12a-o处的原始推力矢量al12a的方向基本上相反的方向取向的次级推力矢量al12a’和al12a”。
5、参考图1至图3通过非限制性示例描述的空中推进设备的推力系统的不同实施例共享同一一般原理。其包括提供电子导航控制器30,所述电子导航控制器控制与用于校正姿态的次级推力器(诸如装置19a)相关联的主推力器(推力单元,诸如单元12a)。因此,这种电子导航控制器30可以主要施加主推力器的主要动力,然后施加次级推力器的辅助动力,用于独立于由所述电子导航控制器30针对所述主推力器中的每个生成的动力命令而基于由惯性单元提供的测量结果来校正该空中推进设备的姿态。最后,当借助于次级姿态校正推力器的姿态校正被证明不足时,所述推进设备电子导航控制器30再次影响主推力器的动力,从而增加或减小推力矢量的幅值。
6、通常,主推力器是内燃机,其一方面提供将推进设备10提升到空中所需的动力,并且另一方面,在飞行持续时间方面提供足够的操作范围。关于次级推力器,其通常是针对其响应性选择和定尺寸的电控马达,其响应性大于受到惯性阻碍而难以靠自己稳定推进设备10的姿态的可比的内燃机的响应性。另一方面,电动次级推力器的操作范围和动力通常低于热推力器的操作范围和动力。因此,适合使用热(内燃)和电动两种类型的推力器,以便提高推力系统的响应性,同时关于能量维持令人满意的操作范围。
7、这种基于针对内燃推力器生成连续动力命令、然后针对电动推力器生成连续动力命令的设计的结果是空中推进设备的低响应性和紧张性(tonicité)、有限姿态稳定性、可以明显提高的控制准确度、不同推力器的减小的操作范围,一些推力器需要校正其他推力器的不足或故障。此外,为生成不同主推力器12a、12b、12c、12d和次级推力器19a、19b、19c、19d的动力命令而由这种空中推进设备10的电子导航控制器30实现的处理被证明在设计和实现上复杂,以提供所述空中推进设备10的令人满意的飞行。
技术实现思路
1、本发明使得可以解决由已知或上文提及的方案产生的全部或部分缺点。
2、在本发明贡献的众多优点之中,可以提及的是,本发明使得可以:
3、-提出组合操作范围、动力和响应性的推力系统;
4、-简化由电子导航控制器实现的处理,电子导航控制器现在只需要向一个或多个推力系统发送推力命令,而不管这些推力系统的技术或相应布置如何;
5、-将用于校正推力矢量的处理分散在每个推力系统的水平处,以将源自中央电子导航控制器的推力命令转换成对(内燃)热推力器的和/或用于致动由所述热推力器提供的推力的电动校正装置的动力命令,以便最大化每个推力系统的响应性,从而增加或减少所提供的推力;
6、-将根据本发明的技术教导转用(transposer)到任何推进设备,无论是空中、海上还是陆地推进设备。
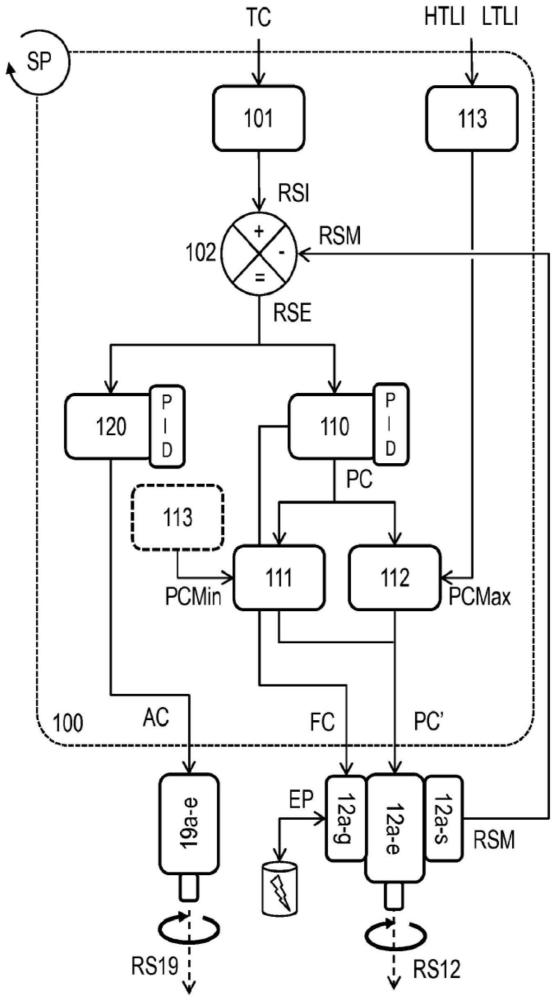
7、为此目的,本发明提供一种用于校正由推力系统的推力单元提供的推力矢量的方法,所述推力系统还包括被布置成实现所述方法的处理装置。这种推力单元包括响应于动力命令由内燃机的旋转轴旋转移动的机械转子。
8、这种方法迭代地包括:
9、-将推力命令转换成推力单元的内燃机的轴的旋转速度设定点的步骤;
10、-通过与所述内燃机且与所述处理装置协作的测量传感器产生所述轴的所测量旋转速度与所述旋转速度设定点之间的误差值的步骤;
11、-基于所述内燃机的轴的所测量旋转速度与所述旋转速度设定点之间的所述误差值生成动力命令,以便减小所述误差值并且因此控制内燃机的速度的步骤;
12、为了提出使操作范围与能量、动力和响应性相组合的推力系统:
13、-所述推力系统还包括由所述推力单元提供的所述推力矢量的电动校正装置;
14、-所述方法包括独立于对内燃机的轴的旋转的所述速度控制、基于内燃机的轴的所测量旋转速度与旋转速度设定点之间的所述误差值生成推力矢量的所述电动校正装置的致动命令的迭代步骤。
15、根据优选实施例,生成动力命令的步骤可以包括通过对所述轴的所述旋转速度设定点与所测量旋转速度之间的所述误差值的乘法、积分和/或求导来产生所述动力命令。
16、为了独立于推力设定点维持由推力单元提供的最小动力,这种方法可以包括如下步骤:校正所生成的动力命令,使得这样的动力命令不小于最小动力命令阈值。
17、相应地,为了独立于推力设定点限制由推力单元提供的动力,根据本发明的方法可以包括如下步骤:校正所生成的动力命令,使得这样的动力命令并不超过最大动力命令阈值。
18、根据后两种变型中的一者,为了使得可以动态地修改这种最小和/或最大命令阈值,根据本发明的方法可以包括如下步骤:考虑推力单元的推力的下限或上限设定点以及最小或最大命令阈值的初始化。
19、根据有利实施例,致动推力矢量校正装置的步骤可以包括:通过对内燃机的轴的所述旋转速度设定点与所测量旋转速度之间的所述误差值的乘法、积分和/或求导来生成所述推力矢量校正装置的致动命令。
20、根据第二主题,本发明涉及一种计算机程序产品,其包括能够由计算机的处理装置解释的一个或多个程序指令,所述程序指令能够被载入所述计算机的非易失性存储器中,其特征在于,所述指令由所述处理装置的执行致使实现根据本发明的推力矢量校正方法。
21、根据第三主题,本发明涉及一种计算机可读存储介质,其包括这种计算机程序产品的指令。
22、根据第四主题,本发明涉及一种推力系统,其包括推力单元、由所述推力单元提供的所述推力矢量的电动校正装置、被布置成实现根据本发明的推力矢量校正方法的处理装置。
23、根据这种推力系统的第一实施例,推力单元可以包括:
24、-旋转轴内燃机,所述旋转轴内燃机的旋转速度是由处理装置生成的动力命令的函数;
25、-机械转子,所述机械转子由所述内燃机旋转移动。
26、在此情况下,推力矢量的电动校正装置可以包括:
27、-旋转轴电动马达,所述旋转轴电动马达的旋转速度是由处理装置生成的所述校正装置的致动命令的函数;
28、-机械转子,所述机械转子由所述电动马达旋转移动,并且提供基本上平行于由推力单元提供的推力矢量的额外推力矢量。
29、根据这种推力系统的此第一实施例,所述推力系统还可以包括马达发电机,所述马达发电机与推力单元的内燃机相互联接,以便根据由处理装置生成的所述马达发电机的致动命令将由所述内燃机提供的机械动力的全部或部分转换成由所述马达发电机提供的电力。
30、本发明提供推力系统的第二实施例,据此:
31、-推力单元可以包括具有流体排放出口的涡轮喷气发动机;
32、-推力矢量的电动校正装置可以包括:
33、o成对的偏转器引导件,所述偏转器引导件旋转安装,并且相互被布置成在流体排放出口的下游、沿与涡轮喷气发动机的流体排放出口处的所述推力矢量的方向基本上垂直的一个或多个方向偏转推力单元的推力矢量的全部或部分;
34、o电动致动器,所述电动致动器被布置成解释致动命令,并且分别引起偏转器引导件的旋转。
35、根据第五主题,本发明涉及一种推进设备,其包括根据本发明的至少一个推力系统,所述推进设备包括导航控制装置,所述导航控制装置被布置成生成能够由所述至少一个推力系统的处理装置解释的推力命令。
36、为了赋予空中推进设备竖直起飞和降落能力,所述空中推进设备可以包括被布置成接收负载的平台、所述至少一个推力系统的推力单元的支撑装置,所述支撑装置被布置成在基本上垂直于所述平台的方向上取向所述推力单元的推力矢量。
37、有利地,为了维持最小动力或者限制由根据本发明的推力系统的所述至少一个推力单元提供的动力,所述导航控制器装置可以被布置成生成所述至少一个推力系统的推力单元的推力的下限或上限设定点。
38、为了保护或保持所承载的负载的完整性,根据本发明的推进设备可以包括与平台相关联的整流罩,所述整流罩被布置成保护所述负载免受所述推进设备的环境的影响。
本文地址:https://www.jishuxx.com/zhuanli/20240726/125361.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表