一种大曲率风电塔筒表面维护系统及维护方法与流程
- 国知局
- 2024-07-27 13:47:36
本发明涉及一种金属柱表面维护系统及维护方法,具体涉及一种大曲率风电塔筒表面维护系统及维护方法。
背景技术:
1、风力发电机大多是在远郊、高山或者沿海等条件恶劣的环境下建设,风力发电机的风电塔筒长时间暴露在恶劣环境下会发生表面腐蚀,在表面腐蚀部分会产生大量锈迹,从而容易造成风电塔筒的工作寿命缩短,因此,需要对风电塔筒进行定期维护。
2、现有对风电塔筒的表面维护主要采用人工维护,而风电塔筒的维护不仅属于高空作业,而且由于气象多变,多处于风力较大的地方,进行人工维护时,维护人员的工作姿态不易保持,导致安全性较差,而且影响维护质量和工作效率。
技术实现思路
1、本发明的目的是解决现有对风电塔筒的表面维护主要采用人工维护,而风电塔筒的维护不仅属于高空作业,而且由于气象多变,多处于风力较大的地方,进行人工维护时,维护人员的工作姿态不易保持,导致安全性较差,而且影响维护质量和工作效率的技术问题,而提供一种大曲率风电塔筒表面维护系统及维护方法。
2、为实现上述目的,本发明所采用的技术方案为:
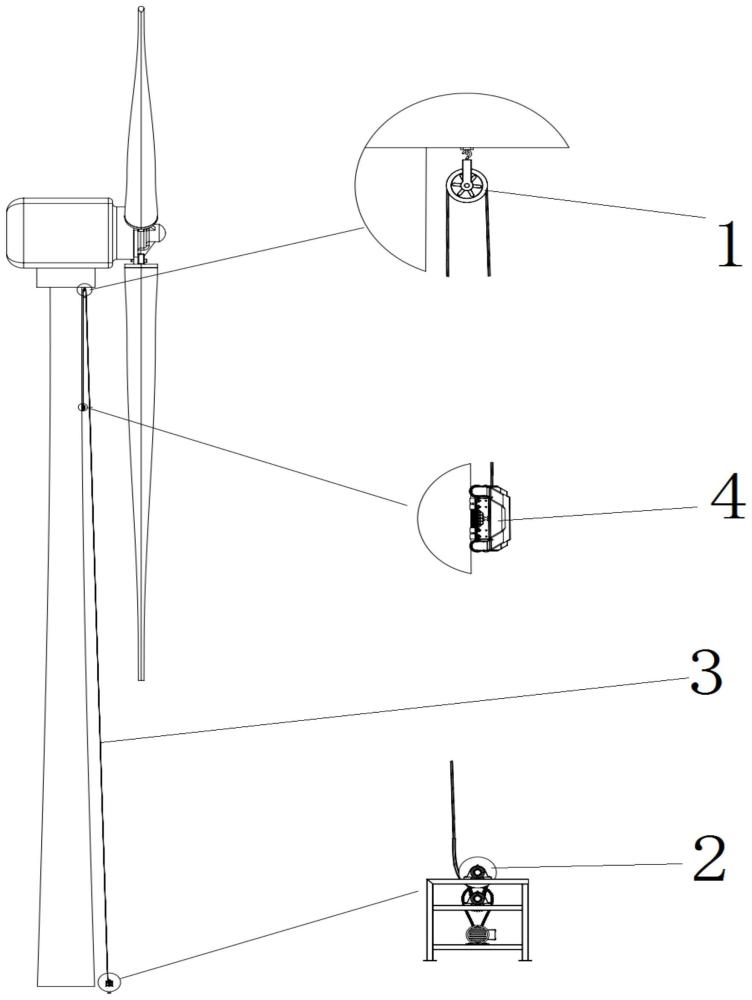
3、一种大曲率风电塔筒表面维护系统,其特殊之处在于:包括上位机、安装于风电塔筒上端的定滑轮、放置于风电塔筒底部的卷扬机、绕设于卷扬机上的线缆、可在风电塔筒上进行纵向和横向移动的爬壁机器人,以及打磨装置和喷漆装置;
4、所述线缆一端与风力发电机的输电口连接,或与便携式发电机的输电口连接;线缆另一端绕过定滑轮后连接于维护机器人的接线端口上;
5、所述爬壁机器人上设置有路径记录装置和多个视觉装置,多个所述视觉装置用于获取爬壁机器人所处位置周围的风电塔筒表面状态,所述路径记录装置用于记录爬壁机器人的移动路径;所述爬壁机器人、卷扬机、视觉装置和路径记录装置均与上位机电连接;
6、所述打磨装置用于在打磨作业时安装于爬壁机器人上,通过路径记录装置实时记录爬壁机器人打磨作业的移动路径;所述喷漆装置用于在喷漆作业时安装于爬壁机器人上,按照打磨作业的移动路径进行喷漆作业;所述打磨装置和喷漆装置与上位机电连接。
7、进一步地,所述爬壁机器人包括安装架,以及安装于安装架上的两组磁力吸附模块、四个动力轮、两个转向机构和用于磁力吸附模块与风电塔筒分离的顶升模块;
8、所述安装架的中心设置有安装槽,所述安装槽用于安装打磨装置或喷漆装置;
9、定义安装架沿风电塔筒的上下方向,位于上端的一端为前端,位于下端的一端为后端;两个所述转向机构分别设置于安装架的前端和后端,四个所述动力轮分别安装于安装架的四个边角处;位于安装架前端的转向机构与前端的两个动力轮连接,用于驱动前端两个动力轮同步转向;位于安装架后端的转向机构与后端的两个动力轮连接,用于驱动后端的两个动力轮同步转向;
10、两组所述磁力吸附模块分别设置于安装架的两侧,且位于同侧的前端和后端两个动力轮的连线上,两组所述磁力吸附模块中磁块与风电塔筒接触的表面分别位于金属柱外周面的切平面内,所述动力轮的胎面为中间高两边低的弧形面,当所述磁力吸附模块中磁块贴合于风电塔筒外周面上时,所述动力轮的胎面内半边贴合于风电塔筒的外周面上;
11、所述顶升模块设置在安装架上且位于安装架与金属柱之间所述顶升模块设置在安装架上且位于安装架与金属柱之间;所述转向机构、顶升模块均与上位机电连接。
12、进一步地,所述磁力吸附模块包括连接板以及若干磁铁;
13、所述连接板一侧与安装架连接,若干所述磁铁沿连接板的长度方向布设于连接板另一侧,且分别通过可锁止的铰接件与连接板连接,用于根据风电塔筒的直径大小对磁铁的倾斜角度进行调节。
14、进一步地,所述转向机构包括转向电机、滚珠丝杠、转向滑块、刹车盘、导向组件以及两个转向连杆;
15、所述转向电机安装于安装架上,且位于同一端两个动力轮之间;所述转向电机的输出端与滚珠丝杠的一端连接,所述刹车盘与滚珠丝杠的另一端连接,所述转向滑块套装且螺纹连接于滚珠丝杠上,所述转向滑块通过导向组件与安装架连接;
16、两个所述转向连杆沿转向电机输出轴的轴向对称设置,两个所述转向连杆的一端分别与转向滑块铰接,另一端分别与同一端的两个动力轮铰接;
17、所述转向电机与上位机电连接。
18、进一步地,所述转向电机安装于安装架设有磁力吸附模块的一侧表面,所述转向连杆设置于安装架另一侧表面;
19、所述安装架上开设有与转向滑块运动轨迹相适配的贯穿槽,所述转向滑块穿过贯穿槽与转向连杆的一端连接。
20、进一步地,所述转向机构还包括分别与上位机电连接的接触传感器和编码器;
21、所述接触传感器安装于安装架上,且位于转向滑块运动轨迹的一端,用于动力轮的调零限位,当所述转向滑块接触到接触传感器上时,动力轮处于初始位置;
22、所述编码器安装于动力轮上,用于监测动力轮的转向角度;
23、所述接触传感器、编码器均与上位机电连接。
24、进一步地,所述打磨装置包括固定架、打磨组件、调节组件以及用于收集打磨组件打磨时产生废屑的吸尘装置;
25、所述打磨组件包括打磨轮、两个相对设置于打磨轮两端的驱动电机以及连接架;所述打磨轮的外周面用于在打磨作业时与圆柱金属塔筒表面接触;两个所述驱动电机均安装于连接架上,所述驱动电机的输出轴通过连接件与打磨轮的轮轴连接;
26、所述调节组件包括安装于固定架上的调节电机、多个导向柱以及压力反馈单元;所述调节电机的输出端穿过固定架与连接架连接,用于带动连接架远离或靠近风电塔筒表面,所述压力反馈单元设置于固定架远离连接架一侧,多个所述导向柱的轴向与调节电机的输出方向平行设置,所述导向柱一端与压力反馈单元连接,另一端穿过固定架与连接架连接;
27、所述驱动电机、调节电机、压力反馈单元以及吸尘装置均与上位机电连接。
28、进一步地,所述吸尘装置包括吸尘组件、吸尘管以及吸尘密封舱;
29、所述吸尘组件安装于固定架上,所述吸尘密封舱安装于连接架上且与打磨轮位于同一侧,所述吸尘密封舱上设置有与打磨轮相适配的安装槽,所述打磨轮位于吸尘密封舱内且外周面穿出安装槽,用于在打磨作业时与风电塔筒的表面接触;所述吸尘组件与上位机电连接;
30、所述吸尘管一端与吸尘组件连接,另一端置于吸尘密封舱内。
31、进一步地,所述视觉装置为广角摄像头,数量为四个;四个所述视觉装置分别设置于安装架的四个不同方位,用于分别获取爬壁机器人四周的风电塔筒表面图像信息;
32、所述路径记录装置为轨迹球装置。
33、同时,本发明还提供了一种大曲率风电塔筒表面维护方法,基于一种大曲率风电塔筒表面维护系统,其特殊之处在于,具体按照以下步骤实施:
34、步骤1、通过外部的无人机初步获取风电塔筒表面的图像信息;通过上位机根据风电塔筒表面的图像信息初步确定待维护位置,将风电塔筒的外周面沿其轴向划分为n个等分的待维护区域,n为大于等于2的偶数,根据待维护位置确定爬壁机器人在四个待维护区域内的理论移动路径;
35、步骤2、将打磨装置安装至爬壁机器人上,将卷扬机和定滑轮均置于一个待维护区域内;
36、步骤3、通过上位机控制爬壁机器人从下至上根据理论移动路径在该待维护区域内移动;
37、步骤4、在爬壁机器人移动过程中,使用视觉装置实时获取风电塔筒表面的图像信息,通过上位机最终确定该待维护区域内的待维护位置,通过打磨装置对最终确定的待维护位置进行打磨除锈,同时通过路径记录装置实时记录爬壁机器人的实际移动路径,完成该待维护区域内待维护位置的打磨除锈;
38、步骤5、控制爬壁机器人从风电塔筒上端横移至下一待维护区域内,将卷扬机和定滑轮均置于该待维护区域内,控制爬壁机器人从上至下移动,按照步骤4完成该待维护区域内待维护位置的打磨除锈;
39、步骤6、控制爬壁机器人从风电塔筒上端横移至下一待维护区域内,将卷扬机和定滑轮均置于该待维护区域内,返回步骤3,直至完成n个待维护区域内待维护位置的打磨除锈;
40、步骤7、使用喷漆装置替换打磨装置,控制爬壁机器人根据打磨时爬壁机器人的实际移动路径移动,依次对n个待维护区域内完成打磨除锈的位置进行喷漆;
41、步骤8、完成风电塔筒表面的维护。
42、与现有技术相比,本发明的有益效果是:
43、1、本发明通过爬壁机器人在打磨时搭载打磨装置,在喷漆时搭载喷漆装置,并通过轨迹记录装置记录打磨时爬壁机器人的移动路径,控制爬壁机器人在喷漆时按照打磨时的移动路径移动,可以实现打磨除锈+喷漆的表面维护作业,相比于采用人工维护的方式,采用爬壁机器人风阻较小,可以更好的贴合在风电塔筒表面,适用于条件恶劣的环境,实现稳定、高效地维护作业;通过上位机实施控制卷扬机和爬壁机器人同步工作,可以通过电缆长时间为爬壁机器人提供工作所述电能;通过设置的视觉装置可以实时发现待维护的位置、监测打磨效果和喷漆效果,实现精准、高质量的维护作业。
44、2、本发明的爬壁机器人通过采用将两个转向机构分别驱动四个动力轮、将磁力吸附模块设置于前后端一侧两个动力轮的连线上、将工作的打磨装置和喷漆装置搭载在安装架的中心位置,实现了爬壁机器人的紧凑布局,不仅简化了结构、减小体积降低风阻,而且降低了重量、降低了功耗;并且通过设计磁铁沿风电塔筒外周面的切线方向设置、动力轮的胎面为中间高两点低的弧形面,不仅可以更好的贴合大曲率金属柱表面,并在一定的直径变化范围内,均可稳定移动;同时在动力轮转向时,通过设置的胎面结构可以在其最高点处转动,防止转向时爬壁机器人与风电塔筒之间间距发生变化,导致磁力吸附失效。
45、3、本发明通过设置磁铁通过可锁止的铰接件与连接板连接,使得磁铁可根据不同直径的风电塔筒进行调节,使得磁铁在风电塔筒表面直径变化范围内均可稳定移动。
46、4、本发明通过设置的转向电机带动滚珠丝杠转动,从而通过转向滑块带动两个转向连杆移动,相比于采用直线电机的方式,本发明采用的结构扭转力更大,能够承受更大的负载,不易出现转向失效的情况;同时,通过设置的刹车盘可以使滚珠丝杠稳定、精准的停在某一转动角度上,实现动力轮的精准转向控制,不易出现晃动的情况。
47、5、本发明通过设置的接触传感器可以当转向滑块与其接触时发出电信号,用于动力轮的调零限位,提高转向精度,从而实现爬壁机器人稳定地横移和竖移;通过设置编码器可以实时监测动力轮的转向角度,以便于精准控制爬壁机器人的行走轨迹。
48、6、本发明通过双驱动电机驱动打磨轮转动,不仅增强了打磨轮转动时的稳定性,而且增大了打磨轮的扭矩,提高了打磨效果;通过设置的调节电机和压力反馈板可以实时监测打磨轮与风电塔筒表面的接触应力,并进行自适应调整,防止出现由于接触不到位导致的打磨失效或效果不佳问题。
49、7、本发明通过设置的吸尘密封舱可以将打磨轮的周围围成一个较为封闭的环境,使得打磨产生的残渣聚集在舱体内,并通过吸尘组件和吸尘管将残渣进行吸收暂存,防止打磨产生的残渣造成环境污染。
50、8、本发明通过经风电塔筒外周面划分四个待维护区域,控制爬壁机器人搭载打磨装置进行“上-下-上-下”的工作顺序分别对n个待维护区域进行打磨除锈,防止直接控制爬壁机器人进行一周的环形维护作业出现线缆缠绕打结的情况;并通过爬壁机器人搭载喷漆装置按照打磨时的移动路径移动,进而实现风电塔筒的表面维护操作,维护效率高、维护效果好。
本文地址:https://www.jishuxx.com/zhuanli/20240726/127636.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表