一种基于切换滑模控制的固定翼空投无人机姿态控制方法及系统
- 国知局
- 2024-07-30 09:23:54
本发明涉及无人机姿态控制,尤其涉及一种基于切换滑模控制的固定翼空投无人机姿态控制方法。
背景技术:
1、近年来,随着无人机设计技术与自动化技术的快速发展,空投无人机在灾区救援和货物配送等领域得到广泛应用。其中,固定翼无人机具有飞行速度快、载重量大、续航时间长等优势,更适合应用于远距离、重载荷运输和空投任务。与传统的巡航飞行任务相比,在空投任务中,固定翼无人机要携带相较于自身质量较大的载荷。在这种大载重比情况下,无人机的质量、质心位置和气动特性均将在投放后发生变化,容易引起投放前后飞行状态的跳变,甚至导致无人机失稳。这对无人机空投过程建模的精确性和飞行控制器的鲁棒性提出了较高的要求。
2、在现有的空投无人机飞行控制问题研究中,一般只考虑载荷装载至载机几何对称面内(如机腹等)的情况,这样尽管载荷被依次投放,载机与载荷的质量分布始终处于对称状态,仅产生重量的改变。这一传统研究方法简化了建模过程,但忽略了载荷被安装在例如机翼下方等非对称面的更广泛的情况。除此之外,现有的固定翼空投无人机控制问题研究往往采用无人机纵向简化动力学模型,只考虑空投对无人机纵向分量,如攻角、俯仰角等状态变量的影响,没有考虑如滚转角等横向分量的变化情况。因此,设计一种考虑非对称载荷情况的横纵向非解耦的控制器,可以应用于更广泛的无人机空投问题,更具有实际意义。
3、在无人机的飞行控制方面,滑模控制方法能够通过设计滑动模态改变系统的原有控制结构,使其对扰动和系统参数变化不敏感,从而提高系统的鲁棒性。由于其出色的抗扰性能,滑模控制目前已初步应用于无人机空投问题中,解决了空投过程中的高度速度保持等一系列问题,取得了一定的效果。然而,在现有研究中,空投所导致的无人机系统参数变化总是被视为一种可以被滑动模态抵消的控制干扰,所采用的控制器基本结构和参数在空投前后并没有做适应性调整,这在载荷重量较低时仍可以保证较好的控制效果,然而在大载重比投放任务中,往往会产生系统模型与控制器不匹配的问题。针对这一问题,切换控制理论具备多模态适应和故障容错等优势,已被应用于具有参数跳跃的机器人系统例如四旋翼无人机控制、无人车控制等。因此,为了结合为了结合滑模控制的强鲁棒性以及切换控制对参数突变系统的良好处理能力,在传统滑模控制方法基础上引入多模态切换控制理论进行改进,提高无人机控制性能,势在必行。
4、如何在传统滑模控制方法基础上引入多模态切换控制理论以提高无人机控制性能,现有技术并没有给出相应的解决方案。
技术实现思路
1、本发明要解决的技术问题是:
2、本发明的目的是提供一种基于切换滑模控制的固定翼空投无人机姿态控制方法及系统,以解决现有的无人机姿态控制技术没有考虑空投对纵向和横向分量的影响限定无人机空投的广泛应用、以及解决针对固定翼无人机在连续空投中因系统频繁切换可能导致的不稳定问题。
3、本发明为解决上述技术问题所采用的技术方案为:
4、本发明所述的一种基于切换滑模控制的固定翼空投无人机姿态控制方法包括以下步骤:
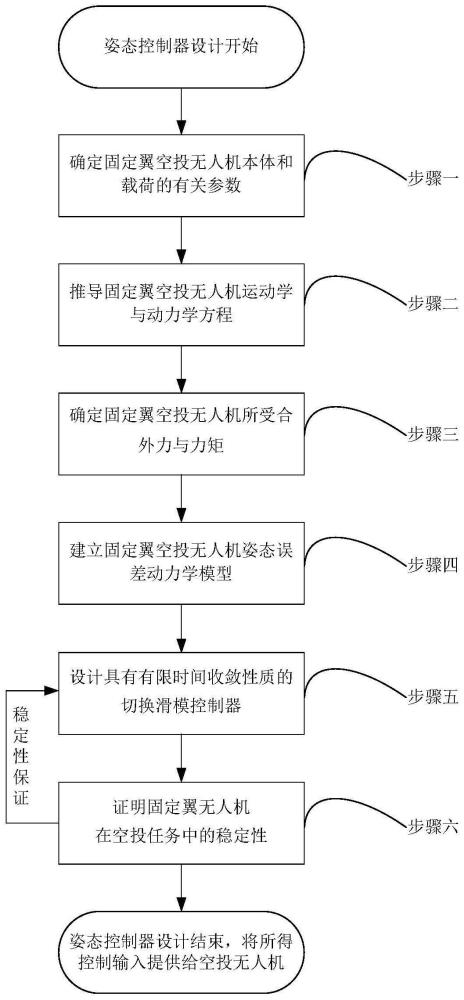
5、步骤一:确定固定翼空投无人机本体(以下称载机)和载荷的有关参数,具体包括:载机质量、转动惯量、质心位置、机翼面积、翼展、平均气动弦长、空气动力学系数等;载荷的数量、质量、安装位置等;
6、步骤二:在步骤一所得参数的基础上,推导固定翼空投无人机在不同载荷搭载情况下的运动学和动力学方程。具体步骤为:首先将载荷视为质点,将载机视为刚体,根据步骤一所得载机和载荷的质量、质心位置和转动惯量等参数,计算出不同载荷搭载情况下的载机与载荷整体(以下简称整体)的总质心、总质量和总转动惯量;随后,根据坐标系转换关系建立运动学方程,根据牛顿定律和欧拉方程建立动力学方程;
7、步骤三:确定固定翼空投无人机所受合外力和合外力矩,具体步骤为:假设无人机气动外形在空投过程中的变化可以忽略不计,根据步骤一中所得空气动力学参数计算出整体所受气动力,与重力、发动机推力结合,计算出整体所受合外力,根据空气动力学参数和总质心的偏移量计算出整体所受气动力矩,即无人机所受合外力矩;最后,将所得无人机所受合外力和合外力矩代入动力学方程,完成运动学与动力学建模;
8、步骤四:根据步骤二和步骤三建立的运动学与动力学模型,建立固定翼空投无人机姿态误差动力学模型,并将其建模为非线性仿射切换系统;具体步骤为:设定期望姿态角和期望姿态角速度,代入并建立无人机姿态误差动力学模型;假设固定翼无人机的速度在投放过程中发生的变化可忽略不计,将无人机姿态误差动力学模型改写为线性切换项、二次项、非线性扰动切换项相结合的形式;
9、步骤五:根据步骤四建立的姿态误差动力学模型,设计具有有限时间收敛性质的切换滑模控制器。具体包括姿态角控制器与姿态角速度切换控制器;具体步骤为:首先将姿态角误差设为外环滑模面,设计具有有限时间收敛性质的姿态角滑模控制器,然后在此基础上,将姿态角速度误差设计为内环滑模面,设计具有有限时间收敛性质的姿态角速度切换滑模控制器,控制增益由求解线性矩阵不等式获得;
10、步骤六:根据步骤五设计的切换滑模控制器,证明固定翼无人机在空投任务中的稳定性。具体包括:证明无人机在单个模态下的有限时间收敛性质,分析固定翼无人机在连续空投任务中的稳定性,并确定最小空投间隔时间。
11、一种基于切换滑模控制的固定翼空投无人机姿态控制系统,该系统具有与上述技术方案的步骤对应的程序模块,运行时执行上述的一种基于切换滑模控制的固定翼空投无人机姿态控制方法中的步骤。
12、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序配置为由处理器调用时实现上述的一种基于切换滑模控制的固定翼空投无人机姿态控制方法的步骤。
13、本发明具有以下有益技术效果:
14、本发明是针对载荷投放瞬间质量特性跳变的固定翼空投无人机飞行控制问题而提出的。针对载荷被设置在载机非对称面的更普遍情况,综合考虑空投对纵向和横向分量的影响,设计了横纵非解耦的具有有限时间收敛性质的非线性控制器,适用于不同种类的空投无人机;同时,本发明将无人机不同载荷搭载情况视为系统的不同模态,将空投及其引起的无人机参数突变过程建模为系统模态的切换动作,在此基础上设计切换滑模控制器,根据平均驻留时间理论求解控制器增益,确定最小空投间隔时间。本发明在传统滑模控制方法基础上引入多模态切换控制理论进行改进,以结合滑模控制的强鲁棒性以及切换控制对参数突变系统的良好处理能力,从而提高无人机控制性能。
15、本发明从建立一种更普适的固定翼空投无人机动力学模型统出发,提出一种基于切换滑模控制的空投无人机姿态控制器设计方法,并近一步根据平均驻留时间切换控制理论求解控制器增益,确定最小空投间隔时间。相关成果可覆盖在不同位置搭载不同重量载荷的固定翼空投无人机飞行控制方案,具有良好的实际应用价值。针对载荷被安装在例如机翼下方等非对称面的多种装载情况,综合考虑载荷对质心变化的影响,提出横纵向非解耦动力学建模,实现了对空投过程的精准建模。该建模方法同样适用于各种质心变化情况下固定翼无人机的控制问题,具有广泛的适用范围。针对固定翼无人机在连续空投中因系统频繁切换可能导致的不稳定问题,提出基于滑模控制的切换控制器,根据平均驻留时间理论确定空投的最小间隔时间,为无人机连续空投任务提供稳定性保证。
16、综上,本发明利用滑模控制与切换控制理论,有效解决了固定翼无人机在空投过程中的姿态控制问题,提高了固定翼无人机在空投过程中的安全性和可靠性,且适用范围广泛,具有较高的工程应用价值。
本文地址:https://www.jishuxx.com/zhuanli/20240730/149368.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。