基于数据分析的激光雷达性能测试方法及系统与流程
- 国知局
- 2024-07-30 11:04:40
本技术涉及激光雷达,具体涉及基于数据分析的激光雷达性能测试方法及系统。
背景技术:
1、三维成像激光雷达由于其具有较高的分辨率和抗干扰能力,被广泛应用于军事遥感、防灾预警、自动驾驶等诸多领域。现如今的三维激光雷达为了适应自动驾驶的需求,在横向上具有较高的角分辨率,但是在纵向扫描上由于机械结构的限制,往往角分辨率都较低,由此容易造成激光雷达在检测范围内扫描的均匀性较差,因此在垂直方向上更加容易受到干扰。
2、此外,外界环境的变化容易引发激光脉冲的反射畸变现象,对于目标物表面反射率差异较大的更易引起激光脉冲的反射畸变现象,而激光脉冲的反射畸变会使得激光脉冲的有效信息受损。针对激光脉冲的反射畸变现象,可以通过多种方式进行优化,从而减少激光脉冲信号受反射畸变现象的影响。因此,为了表征激光雷达的探测性能,确保激光雷达的环境鲁棒性,需要提供一种性能测试方法用于评估激光雷达在不同场景下对反射畸变现象的处理能力。
技术实现思路
1、为了解决上述技术问题,本技术的目的在于提供基于数据分析的激光雷达性能测试方法及系统,所采用的技术方案具体如下:
2、第一方面,本技术实施例提供了基于数据分析的激光雷达性能测试方法,该方法包括以下步骤:
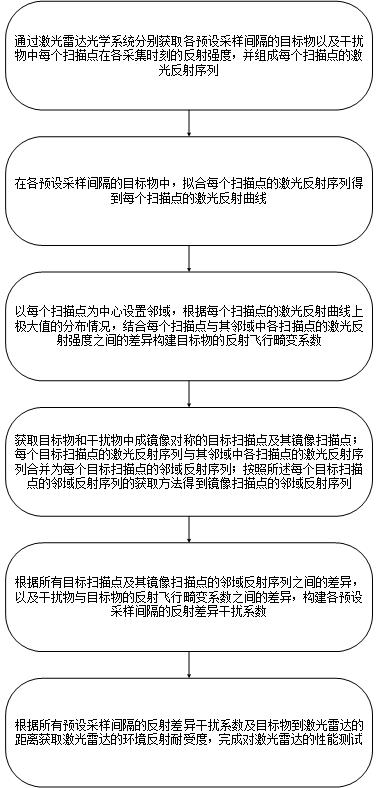
3、通过激光雷达光学系统分别获取各预设采样间隔的目标物以及干扰物中每个扫描点在各采集时刻的反射强度,并组成每个扫描点的激光反射序列;
4、在各预设采样间隔的目标物中,拟合每个扫描点的激光反射序列得到每个扫描点的激光反射曲线;以每个扫描点为中心设置邻域,根据每个扫描点的激光反射曲线上极大值的分布情况,结合每个扫描点与其邻域中各扫描点的激光反射强度之间的差异构建目标物的反射飞行畸变系数;
5、获取目标物和干扰物中成镜像对称的目标扫描点及其镜像扫描点;每个目标扫描点的激光反射序列与其邻域中各扫描点的激光反射序列合并为每个目标扫描点的邻域反射序列;按照所述每个目标扫描点的邻域反射序列的获取方法得到镜像扫描点的邻域反射序列;
6、根据所有目标扫描点及其镜像扫描点的邻域反射序列之间的差异,以及干扰物与目标物的反射飞行畸变系数之间的差异,构建各预设采样间隔的反射差异干扰系数;
7、根据所有预设采样间隔的反射差异干扰系数及目标物到激光雷达的距离获取激光雷达的环境反射耐受度,完成对激光雷达的性能测试。
8、优选的,所述每个扫描点的激光反射序列的获取方法为:
9、在各预设采样间隔内,每个扫描点的所有采集时刻的反射强度组成每个扫描点的激光反射序列。
10、优选的,所述目标物的反射飞行畸变系数的构建过程为:
11、在各预设采样间隔的目标物中,根据每个扫描点与其邻域中各扫描点的激光反射强度之间的差异,构建每个扫描点的邻域中各扫描点的飞行偏差系数;
12、计算每个扫描点的邻域中所有扫描点的飞行偏差系数的均值,记为第一特征值;目标物的反射飞行畸变系数与所有扫描点的第一特征值成正相关关系。
13、优选的,所述每个扫描点的邻域中各扫描点的飞行偏差系数的构建过程为:
14、在各预设采样间隔的目标物中,计算每个扫描点的激光反射曲线上最大值对应的采集时刻与其对应的激光反射序列中激光反射强度的起始采集时刻的差值,记为每个扫描点的飞行时间;
15、根据每个扫描点的激光反射曲线上极大值的分布情况,构建每个扫描点的极差偏离系数;
16、将每个扫描点与其邻域中各扫描点的飞行时间差值取绝对值,记为第一权重;计算每个扫描点的激光反射序列与其邻域中各扫描点的激光反射序列之间的距离,记为度量距离;将每个扫描点的极差偏离系数与其邻域中各扫描点的极差偏离系数之间的差值取绝对值,记为第二权重;每个扫描点的邻域中各扫描点的飞行偏差系数与第一权重和度量距离成正向关联,与第二权重成负向关联。
17、优选的,所述每个扫描点的极差偏离系数的构建方法为:
18、在各预设采样间隔的目标物中,计算每个扫描点的激光反射曲线上中最大值与剩余极大值之间的差值的平均值,记为极差平均值;计算每个扫描点的激光反射曲线上所有极大值的标准差,记为极值标准差;所述极差平均值和所述极值标准差均与所述每个扫描点的极差偏离系数成正向关联。
19、优选的,所述每个目标扫描点的邻域反射序列的获取方法为:
20、在各预设采样间隔的目标物中,计算每个目标扫描点到其邻域中各扫描点的距离;根据所述距离对每个目标扫描点的邻域中各扫描点的激光反射序列进行加权;
21、将每个目标扫描点的激光反射序列与其邻域中各扫描点的加权后的激光反射序列合并为每个目标扫描点的邻域反射序列。
22、优选的,所述各预设采样间隔的反射差异干扰系数为:
23、在各预设采样间隔的目标物和干扰物中,所述每个目标扫描点与其镜像扫描点组成各扫描点对;根据所有目标扫描点及其镜像扫描点的邻域反射序列之间的差异,构建各扫描点对的差异干扰系数;计算所有扫描点对的差异干扰系数的均值,记为各预设采样间隔的第一差异干扰系数;
24、按照目标物的反射飞行畸变系数的获取方法得到干扰物的反射飞行畸变系数;
25、将目标物和干扰物的反射飞行畸变系数的差值取绝对值,记为反射对比系数;所述第一差异干扰系数和所述反射对比系数均与各预设采样间隔的反射差异干扰系数成正协同关系。
26、优选的,所述各扫描点对的差异干扰系数的构建过程为:
27、在各预设采样间隔的目标物和干扰物中,将每个目标扫描点与其镜像扫描点的邻域反射序列中相同位置处激光反射强度的差值取绝对值,组成每个扫描点对邻域反射差值序列;
28、计算所述邻域反射差值序列的标准差,记为各扫描点对的第一残差值;将每个目标扫描点与其镜像扫描点的飞行时间的差值取绝对值,记为各扫描点对的时间权重,所述第一残差值与所述时间权重均与各扫描点对的差异干扰系数成正向关联。
29、优选的,所述激光雷达的性能的测试过程为:
30、在各预设采样间隔中,获取目标物的中心位置并计算其到激光雷达的距离的倒数,记为各预设采样间隔的距离间隔权重;
31、所有预设采样间隔的反射差异干扰系数与其距离间隔权重加权的结果作为激光雷达的环境反射耐受度,以对激光雷达性能测试。
32、第二方面,本技术实施例还提供了基于数据分析的激光雷达性能测试系统,包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述方法的步骤。
33、本技术至少具有如下有益效果:
34、本技术通过在激光雷达有效距离范围内等间隔设置目标物和干扰物,由此得到目标物和干扰物;根据每个扫描点的激光反射曲线上极大值的分布情况,结合每个扫描点与其邻域中各扫描点的激光反射强度之间的差异,以及激光反射信号的分布情况得到目标物和干扰物的反射飞行畸变系数;反映了每个扫描点的邻域中各扫描点受环境光照因素引起反射畸变的情况,结合激光雷达中心面得到目标物和干扰物的对应扫描点,由此得到反射差异干扰系数,反映了因反射率差异引起反射畸变的情况的程度。本技术根据所有采样间隔的反射差异干扰系数得到激光雷达整体的环境反射耐受度,解决了传统测试中直接激光雷达数据进行点云匹配带来的巨大计算量,并且通过分析在环境因素和反射率差异对反射畸变的影响情况,能够更加准确衡量激光雷达对反射率差异和环境因素的耐受情况,为后续技术和算法优化提供了数据支撑。
本文地址:https://www.jishuxx.com/zhuanli/20240730/155384.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表