一种自动化港口AGV充电优化调度方法与流程
- 国知局
- 2024-07-31 22:43:26
本发明涉及agv充电,具体涉及到一种自动化港口agv充电优化调度方法。
背景技术:
1、面对港口规模的不断扩大和交通的日益繁忙,以及货物需求与空箱箱量不匹配的问题,港口陷入了拥堵的困境。一些集装箱码头已经超过了其设计吞吐量。这种集装箱吞吐量需求的增长对现有的港口运营组织架构造成了巨大冲击。同时,由于港口陆域规模的限制,如何有效应对码头吞吐量需求的迅速增长,提高港口的运营效率和服务水平,成为港口运营商面临的重要挑战[1]。不合理的集卡调度方案可能导致岸桥作业停滞,严重影响船舶的服务时间。此外,仅仅通过盲目增加集卡数量来满足岸桥作业需求可能会导致港内拥堵,既无法保证岸桥的作业效率,也造成了集卡资源的浪费。因此,为了最大限度地保证装卸设备的作业效率,提升集装箱在码头内的周转速度,优化集卡调度方案显得至关重要。
2、同时港口交通污染已成为我国城市环境的一大公害,严重威胁着人们的正常生活和身心健康,并成为制约城市居民生活质量提高的重要因素。现在电动卡车的发展迅速,根据现有文献和场景适应性证明,对于电动重卡如果采用充电式内集卡,会对港口用处的运行效率和调度产生较大影响,充电时长较久。而换电站换电机器人每次换电只需要6分钟,可以很大程度上满足车队每日的需求[2]。并由上海港等沿海港口项目实测,换电站的使用具有可复制、可推广的释放性意义。
3、针对上述问题,本发明提供了一种经济高效的agv调度方案、提高港口货物运转的效率的一种自动化港口agv充电优化调度方法。
技术实现思路
1、本发明提供了一种经济高效的agv调度方案、提高港口货物运转的效率的一种自动化港口agv充电优化调度方法。
2、本发明的目的是提供一种自动化港口agv充电优化调度方法,调度方法包括物流调度模块、换电模块和联合优化模型与算法模块。
3、进一步的,物流调度模块的具体计算步骤如下:
4、步骤一、确定每个agv的当前位置和目标岸桥的起始点位置,使用路径规划算法,来计算agv到达目标岸桥的最短路径,通过计算每个agv到各个岸桥起始点的行驶距离,评估每个agv与岸桥之间的距离,并根据任务和调度要求对agv进行合理的分配和调度,具体计算公式为:
5、sdi,j=|xdi-xdj|+|ydi-ydj|+2βij|xp-(1-αij)xdi-αijxdj|
6、其中,d为a、b两个堆场区域,j为并行作业岸桥数量,sdi,j为各区agv到各岸桥起始点的距离,xdi、ydi分别为各区agv的横、纵坐标,xdj、ydj为各岸桥起始点横、纵坐标,xp为agv所在区的右侧边界横坐标,αij为岸桥和agv距离右侧边界的变量,满足下式:
7、
8、其中、βij为agv从第i个区域到第j个区域的特征变量,按照agv行驶规则,从βd矩阵中提取为如下式:
9、
10、将sdi,j由小至大排序,并按照每个岸桥的agv数量,选出此时段响应物流调度的,当出现距离相同的情况时,将soc剩余量多少作为次优先级。
11、进一步的,换电模块具体计算步骤如下:
12、步骤一、各换电站初始状态默认均为空闲,其对应的坐标、满电电池库存已知,依据循环遍历记录的待充电各agv的坐标,读取换电站状态,空闲状态或排队车辆最小方可驾车前去,记为pi,按照行驶规则,遍历计算各agv到所有空闲换电站的距离sid,为避免多车选择同换电站,当一座空闲换电站被选中并且排队车辆比其他换电站多时,更改pi为占用状态po,避免选择换电站冲突,空闲换电站的距离sid的具体计算公式为:
13、sid=|xdi-xa-pi|+|ydi-ya-pi|
14、其中,i需要进行充电的agv,a=1,…,pi,pi为换电站的横、纵坐标;
15、步骤二、计算每个agv完成一轮装卸任务的行驶距离sik,考虑从起始点到岸桥再到堆场的距离之和,具体计算公式为:
16、sik=sdi,j+|xdi-xdd|+|ydi-ydk|+2βjk|xp-(1-αjk)xdi-αjkxdj|
17、其中,xdk、ydk为堆场终止点的横、纵坐标,由于agv从岸桥起始点出发后只能从左至右行驶至堆场内部,βjk为岸桥所在区域和堆场所在区域的变量,从βd矩阵中提取,xp为堆场所在区域的左侧边界横坐标,αjk为岸桥和堆场距离左侧边界的状态变量,满足下式:
18、
19、接着分别计算出agv行驶时间和各自剩余电量:
20、
21、其中,ti为各agv的行驶时间,其等于响应时间t1、岸桥装卸时间t2和实际行驶时间之和,为第i辆调用agv在第t时段结束时的剩余电量,为第i辆agv在第t时段开始时的剩余电量,ploss为单位行驶距离的损失电量,单位为kw·h/m;
22、步骤三、计算第t时段内每辆待换电agv的排队换电时长和电量,换电站中换电机器人的换电时长统一记为6分钟,具体计算公式如为:
23、
24、其中,各agv需要等待充电的时间,ni为每i个agv前排队换电的数量换电站功率变化如下式:
25、pi(t)=pcharmi(t)
26、其中,pi(t)第t时段换电站充电的功率,pchar为每agv电池充电的功率,mi(t)为第t时段换电站需充电的电池数。
27、进一步的,联合优化模型与算法模块具体计算步骤如下:
28、步骤一、建立购电费用与总调度时间最小的目标函数,具体计算公式如下:
29、
30、其中,y为整个调度周期,pt为第t时段换电站充电的功率,cprice(t)第t时段的分时电价,为第t时段内第i辆需换电agv的排队换电时长,ti为为第t时段内第i辆需调度agv的调度时长;
31、步骤二、结合港口调度的实际需求,为保证终止时刻的剩余电量满足所设定的下一周期起始电量的需求,考虑到各辆agv充电的灵活性,对终止时刻电量之和进行约束,以保证下一周期的起始总电量充足,具体计算公式为:
32、
33、其中、为第i辆agv在终止时刻的剩余电量,n为agv总数,socre为下一周期的起始总电量;
34、步骤三、按照agv电池设置的技术及安全要求,设置决策变量上下限约束,具体计算公式为:
35、
36、其中,分别为最小剩余电量的上下限,分别为最大充电电量的上下限;
37、步骤四、使用免疫优化算法,通过生成初始种群,然后进行一系列的交叉、变异和选择操作来逐步改进个体的适应度,并找到解决方案。
38、进一步的,联合优化模型与算法模块的步骤四中的免疫优化算法具体计算步骤如下:
39、步骤一、输入港口所有agv数量、换电站位置、分时电价、调度集装箱数据的初始信息;
40、步骤二、初始抗体群,由约束条件随机产生n个个体并从记忆库中提取m个个体构成初始群体其中为记忆库中个体的数量;
41、步骤三、抗体适应度计算,抗体适应度即目标函数,对物流模块和换电模块进行计算,选取目标函数最优时对应的抗体;
42、步骤四、选取个体最优和全局最优,根据约束条件检查符合的,与上次对比进行更新,并且保存下来;
43、步骤五、对上述群体中各个抗体进行评价,在本算法中对个体的评价是以个体的期望繁殖率p为标准的;
44、步骤六、形成父代群体,将初始群体按期望繁殖率p进行降序排列,并取前n个个体构成父代群体,同时取前m个个体存人记忆库中;
45、步骤七、判断是否满足结束条件,是则结束,反之,则继续下一步操作;
46、步骤八、新群体的产生,基于步骤六的计算结果对抗体群体进行选择、交叉、变异操作得到新群体,再从记忆库中取出记忆的个体,共同构成新一代群体;
47、步骤九、转去执行步骤三;
48、步骤十、最终跳出循环,得到最优的配置方案。
49、本发明具有以下优势:
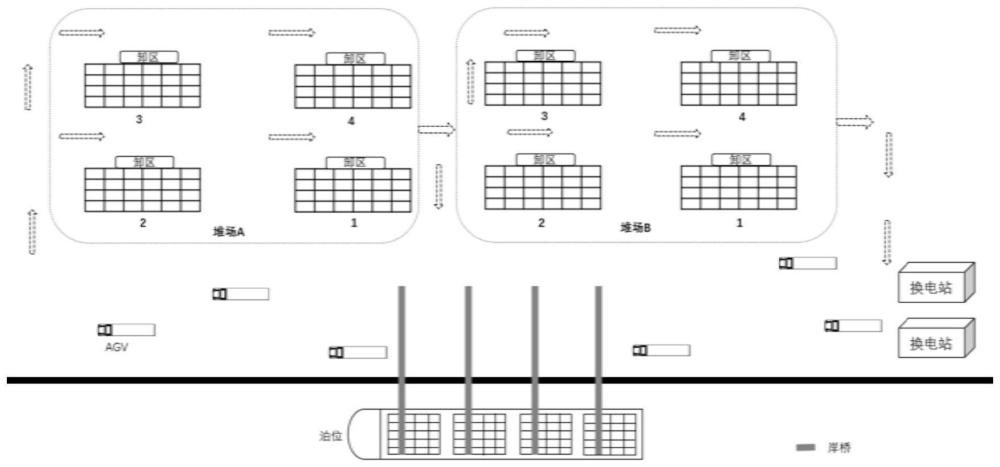
50、本发明通过调度系统指定船舶停靠泊位,并提前分配好相应的岸桥,指派满足电量要求的agv到指定的岸桥位置等待,待岸桥将集装箱装卸至agv后,由agv自动行驶至堆场内指定卸区,并等待场桥卸放集装箱至目的地,随即完成本轮任务,agv保持就地不动,等待下轮指派。自动化码头可分为两个堆场区域,为保证agv无人驾驶的安全性,且在堆场侧agv只能由东向西单向行驶,在岸桥侧方可双向行驶。
本文地址:https://www.jishuxx.com/zhuanli/20240730/194308.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。