立体空域风险评估方法、装置和计算机设备
- 国知局
- 2024-07-31 23:09:58
本技术涉及空中交通,特别是涉及一种立体空域风险评估方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
背景技术:
1、目前,越来越多的空中节点(例如通用航空飞行器和轻小型无人机)会在混合空域(尤其是低空空域)中执行商业飞行任务。随着空中节点越来越多,需要进行空域管理。
2、目前的空域管理方法,是获取空中节点上报的目标时间段的目标空域。然后,将目标时间段内的目标空域划分给空中节点,并隔离管制目标空域。
3、当另一或者另外多个空中节点需要在目标时间段内经过目标空域时,需要通过立体空域风险评估方法确定空中节点在目标空域的风险。但是,目前并没有立体空域风险评估方法可以确定空中节点在目标空域的风险。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种立体空域风险评估方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种立体空域风险评估方法,包括:
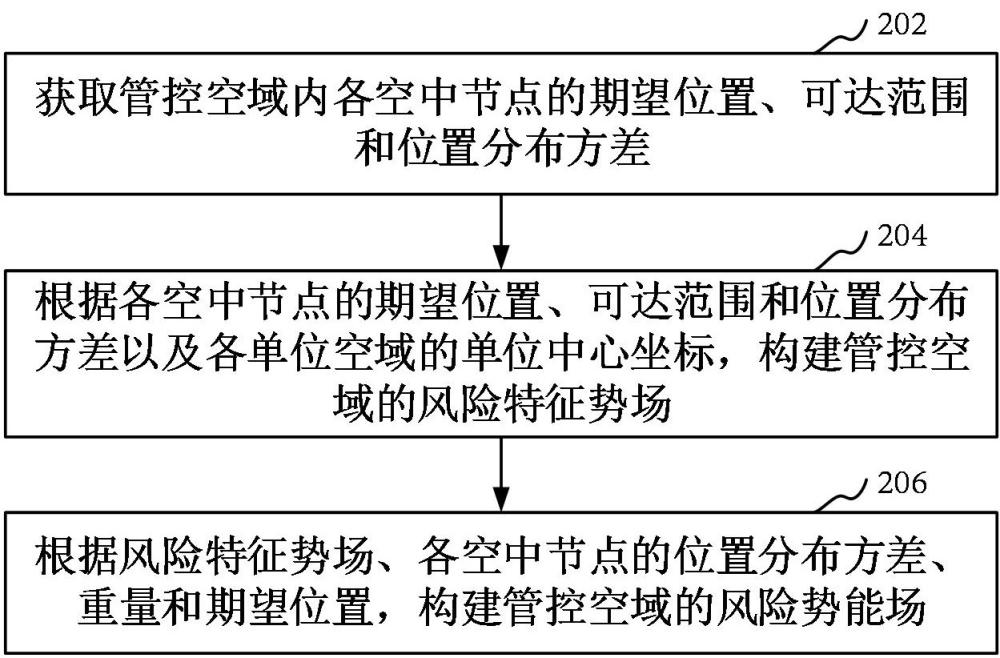
3、获取管控空域内各空中节点的期望位置、可达范围和位置分布方差;所述管控空域包含各单位空域;
4、根据各所述空中节点的期望位置、可达范围和位置分布方差以及各所述单位空域的单位中心坐标,构建所述管控空域的风险特征势场;所述风险特征势场表征所述管控空域的风险大小;
5、根据所述风险特征势场、各所述空中节点的位置分布方差、重量和期望位置,构建所述管控空域的风险势能场;所述风险势能场表征所述管控空域内的各所述空中节点在各所述单位空域的风险大小。
6、在其中一个实施例中,所述获取管控空域内各空中节点的期望位置、可达范围和位置分布方差之前,所述方法还包括:
7、按照预设的划分规则划分管控空域,得到各单位空域;
8、针对每一所述单位空域,基于所述单位空域在所述管控空域中的位置,确定所述单位空域的单位中心坐标。
9、在其中一个实施例中,所述获取管控空域内各空中节点的期望位置、可达范围和位置分布方差,包括:
10、获取管控空域内各空中节点的航行状态数据和基本特征数据;
11、针对每一所述空中节点,对所述空中节点的航行状态数据和所述基本特征数据进行数据处理,得到所述空中节点的期望位置和可达范围;
12、基于分布方差算法、所述可达范围和所述基本特征数据中的目标置信度确定所述空中节点的位置分布方差。
13、在其中一个实施例中,所述针对每一所述空中节点,对所述空中节点的航行状态数据和所述基本特征数据进行数据处理,得到所述空中节点的期望位置和可达范围,包括:
14、针对每一所述空中节点,基于预设的单位时间对所述航行状态数据中的原始位置数据和速度数据进行数据运算,得到所述空中节点的期望位置;
15、根据偏移距离算法,对所述单位时间和所述基本特征数据中的最大加速度进行数据运算,得到所述空中节点的可达范围。
16、在其中一个实施例中,所述基于分布方差算法、所述可达范围和所述基本特征数据中的目标置信度确定所述空中节点的位置分布方差,包括:
17、基于所述基本特征数据中的目标置信度在预设的关联数据表中确定所述置信度对应的目标空间特征值;所述关联数据表中包含各置信度和各空间特征值之间的关联关系;
18、基于分布方差算法对所述可达范围和目标空间特征值进行数据处理,得到所述空中节点的位置分布方差。
19、在其中一个实施例中,所述根据各所述空中节点的期望位置、可达范围和位置分布方差以及各所述单位空域的单位中心坐标,构建所述管控空域的风险特征势场,包括:
20、根据各所述空中节点的期望位置、可达范围和位置分布方差,构建风险特征势算法;
21、针对每一所述单位空域,根据所述风险特征势算法对所述单位空域的单位中心坐标进行运算,得到所述单位空域的风险特征势的值;
22、汇总各所述单位空域的风险特征势的值,得到所述管控空域的全局风险特征势场。
23、在其中一个实施例中,所述根据所述风险特征势场、各所述空中节点的位置分布方差、重量和期望位置,构建所述管控空域的风险势能场,包括:
24、针对每一所述空中节点,根据所述风险特征势场、位置分布方差、重量和期望位置,构建所述空中节点的风险势能算法;
25、针对每一所述单位空域,根据所述风险势能算法对所述单位空域的单位中心坐标进行运算,得到所述空中节点位于所述单位空域的风险势能的值;所述风险势能场表征所述空中节点位于所述单位空域的风险大小;
26、汇总各空中节点位于各单位空域的风险势能的值,得到所述管控空域的风险势能场。
27、第二方面,本技术还提供了一种立体空域风险评估装置,包括:
28、获取模块,用于获取管控空域内各空中节点的期望位置、可达范围和位置分布方差;所述管控空域包含各单位空域;
29、第一构建模块,用于根据各所述空中节点的期望位置、可达范围和位置分布方差以及各所述单位空域的单位中心坐标,构建所述管控空域的风险特征势场;所述风险特征势场表征所述管控空域的风险大小;
30、第二构建模块,用于根据所述风险特征势场、各所述空中节点的位置分布方差、重量和期望位置,构建所述管控空域的风险势能场;所述风险势能场表征所述管控空域内的各所述空中节点在各所述单位空域的风险大小。
31、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
32、获取管控空域内各空中节点的期望位置、可达范围和位置分布方差;所述管控空域包含各单位空域;
33、根据各所述空中节点的期望位置、可达范围和位置分布方差以及各所述单位空域的单位中心坐标,构建所述管控空域的风险特征势场;所述风险特征势场表征所述管控空域的风险大小;
34、根据所述风险特征势场、各所述空中节点的位置分布方差、重量和期望位置,构建所述管控空域的风险势能场;所述风险势能场表征所述管控空域内的各所述空中节点在各所述单位空域的风险大小。
35、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
36、获取管控空域内各空中节点的期望位置、可达范围和位置分布方差;所述管控空域包含各单位空域;
37、根据各所述空中节点的期望位置、可达范围和位置分布方差以及各所述单位空域的单位中心坐标,构建所述管控空域的风险特征势场;所述风险特征势场表征所述管控空域的风险大小;
38、根据所述风险特征势场、各所述空中节点的位置分布方差、重量和期望位置,构建所述管控空域的风险势能场;所述风险势能场表征所述管控空域内的各所述空中节点在各所述单位空域的风险大小。
39、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
40、获取管控空域内各空中节点的期望位置、可达范围和位置分布方差;所述管控空域包含各单位空域;
41、根据各所述空中节点的期望位置、可达范围和位置分布方差以及各所述单位空域的单位中心坐标,构建所述管控空域的风险特征势场;所述风险特征势场表征所述管控空域的风险大小;
42、根据所述风险特征势场、各所述空中节点的位置分布方差、重量和期望位置,构建所述管控空域的风险势能场;所述风险势能场表征所述管控空域内的各所述空中节点在各所述单位空域的风险大小。
43、上述立体空域风险评估方法、装置、计算机设备、计算机可读存储介质和计算机程序产品,获取管控空域内各空中节点的期望位置、可达范围和位置分布方差;所述管控空域包含各单位空域;根据各所述空中节点的期望位置、可达范围和位置分布方差以及各所述单位空域的单位中心坐标,构建所述管控空域的风险特征势场;所述风险特征势场表征所述管控空域的风险大小;根据所述风险特征势场、各所述空中节点的位置分布方差、重量和期望位置,构建所述管控空域的风险势能场;所述风险势能场表征所述管控空域内的各所述空中节点在各所述单位空域的风险大小。采用本方法,通过各空中节点的期望位置、可达范围和位置分布方差以及各单位空域的单位中心坐标,构建管控空域的风险特征势场,明确了管控空域的风险,进而根据风险特征势场确定风险势能场,明确了各空中节点在各单位空域的风险大小,实现了空中节点在各单位空域的风险评估,进而实现了对立体空域的风险评估。
本文地址:https://www.jishuxx.com/zhuanli/20240730/196185.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表