纤维铺放机器人的控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-07-31 23:41:16
本发明涉及智能控制,具体涉及纤维铺放机器人的控制方法、装置、设备及存储介质。
背景技术:
1、纤维铺放机器人利用铺丝头,可以将纤维束铺放到芯模表面;在将纤维束铺放到芯模表面时,需要施加一恒定的压力,保证纤维束紧密贴合到芯模表面。
2、传统的纤维铺放机器人一般利用其末端的施压气缸实现铺放压力的恒定控制,通过施压气缸实现铺放过程的被动柔顺过程,即在施压方向压辊能够小范围移动来补偿末端位置误差造成的铺放压力误差。这种控制方式主要通过位置控制,当铺丝头与芯模表面存在偏差时,由于工件刚度较大,从而导致较小位置偏差就会产生较大的铺放压力误差,从而影响工件的成型质量。
技术实现思路
1、有鉴于此,本发明提供了一种纤维铺放机器人的控制方法、装置、设备及存储介质,以解决铺放压力误差较大的问题。
2、第一方面,本发明提供了一种纤维铺放机器人的控制方法,包括:
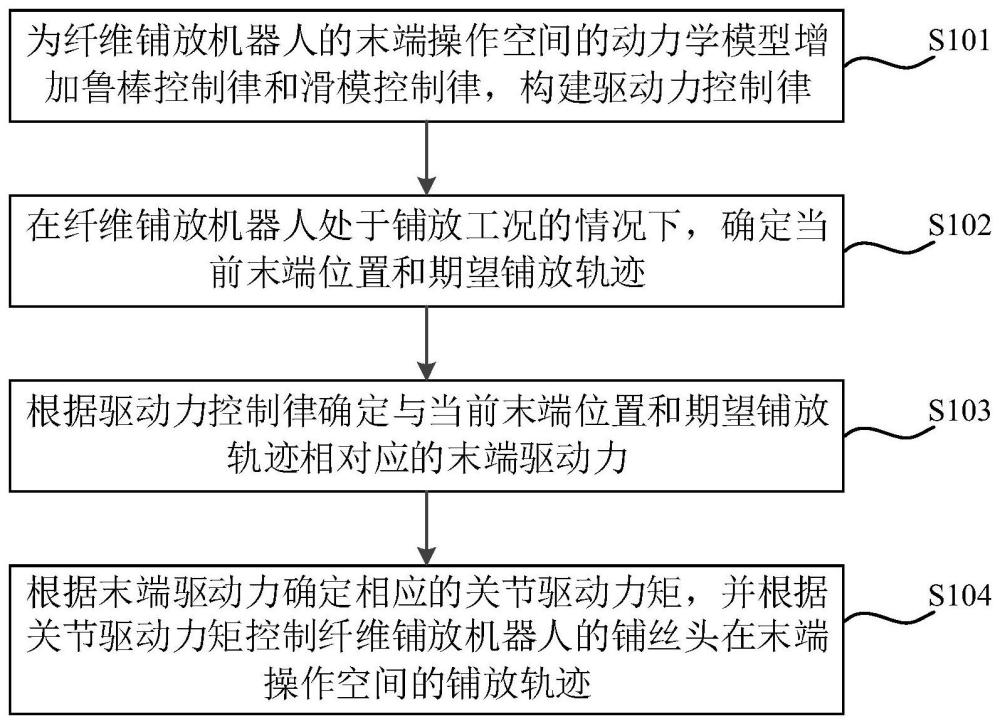
3、为纤维铺放机器人的末端操作空间的动力学模型增加鲁棒控制律和滑模控制律,构建驱动力控制律;
4、在所述纤维铺放机器人处于铺放工况的情况下,确定当前末端位置和期望铺放轨迹;
5、根据所述驱动力控制律确定与所述当前末端位置和所述期望铺放轨迹相对应的末端驱动力;
6、根据所述末端驱动力确定相应的关节驱动力矩,并根据所述关节驱动力矩控制所述纤维铺放机器人的铺丝头在末端操作空间的铺放轨迹。
7、在一些可选的实施方式中,所述为纤维铺放机器人的末端操作空间的动力学模型增加鲁棒控制律和滑模控制律,构建驱动力控制律,包括:
8、根据纤维铺放机器人的标准动力学模型,构建末端操作空间的动力学模型;
9、根据铺放轨迹的轨迹跟踪误差,设计鲁棒控制律和滑模控制律;所述轨迹跟踪误差为所述期望铺放轨迹与实际铺放轨迹之间的误差;
10、将所述鲁棒控制律和所述滑模控制律添加至所述末端操作空间的动力学模型,生成驱动力控制律。
11、在一些可选的实施方式中,所述根据铺放轨迹的轨迹跟踪误差,设计鲁棒控制律和滑模控制律,包括:
12、根据铺放轨迹的轨迹跟踪误差,设计滑模控制的滑模面:其中,s表示所述滑模面,e表示所述轨迹跟踪误差,λ为预设的正定矩阵;
13、根据所述滑模面设计鲁棒控制律和滑模控制律;所述鲁棒控制律和所述滑模控制律满足:
14、
15、其中,ua表示所述鲁棒控制律,us表示所述滑模控制律,k表示系数矩阵,η和ε为预设的调整系数,且ε>0,η≥δ;δ表示由所述末端操作空间的动力学模型计算误差所导致的末端驱动力误差。
16、在一些可选的实施方式中,该方法还包括:
17、判定所述驱动力控制律的稳定性,且判定所述驱动力控制律的稳定性的过程包括:
18、定义李雅普诺夫函数:
19、其中,mx(q)=j-tm(q)j-1;v表示李雅普诺夫函数,j表示雅可比矩阵,q表示关节变量,m(q)表示惯性矩阵的期望值;
20、根据所述末端操作空间的动力学模型,对所述李雅普诺夫函数的一阶偏导数进行简化,确定所述李雅普诺夫函数的一阶偏导数满足:
21、
22、确定所述李雅普诺夫函数的一阶偏导数所满足的不等式:
23、其中,λmin(k)表示系数矩阵k的最小特征值,λmax(mx)表示惯性矩阵mx(q)的最大特征值,μ为不小于零的系数;
24、对所述不等式进行求解,确定在时刻t的系统状态v(t)满足:
25、其中,t0表示初始时刻;
26、基于所述时刻t的系统状态v(t)的极限值,确定所述驱动力控制律具备稳定性;所述极限值满足:
27、在一些可选的实施方式中,所述驱动力控制律为:
28、
29、其中,fx表示末端驱动力,xr表示当前末端位置,ua表示所述鲁棒控制律,us表示所述滑模控制律;j表示雅可比矩阵,q表示关节变量,表示惯性矩阵的计算值,表示离心力/哥氏力矩阵的计算值,表示重力矩阵的计算值。
30、在一些可选的实施方式中,该方法还包括:在所述纤维铺放机器人处于定位工况的情况下,基于期望运动轨迹对所述纤维铺放机器人的铺丝头进行位置控制。
31、在一些可选的实施方式中,该方法还包括:在云计算集群指定主机下建立不同操作系统的虚拟机;所述虚拟机用于根据所述驱动力控制律对纤维铺放机器人的铺放轨迹进行控制,并存储控制过程中生成的轨迹数据。
32、第二方面,本发明提供了一种纤维铺放机器人的控制装置,包括:
33、控制律设置模块,用于为纤维铺放机器人的末端操作空间的动力学模型增加鲁棒控制律和滑模控制律,构建驱动力控制律;
34、确定模块,用于在所述纤维铺放机器人处于铺放工况的情况下,确定当前末端位置和期望铺放轨迹;
35、驱动力计算模块,用于根据所述驱动力控制律确定与所述当前末端位置和所述期望铺放轨迹相对应的末端驱动力;
36、控制模块,用于根据所述末端驱动力确定相应的关节驱动力矩,并根据所述关节驱动力矩控制所述纤维铺放机器人的铺丝头在末端操作空间的铺放轨迹。
37、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的纤维铺放机器人的控制方法。
38、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的纤维铺放机器人的控制方法。
39、本发明提供的纤维铺放机器人的控制方法,基于动力学模型建立结合了鲁棒控制、滑模控制的驱动力控制律,利用该驱动力控制律可以实现对纤维铺放机器人的力和位置的混合控制,可以实现对铺放过程的主动柔顺的动态控制;并且,采用力和位置的混合控制,不仅实现对铺放轨迹的精确跟踪,而且能够有效消除位置误差导致的铺放压力误差,从而可以保证末端铺放压力的恒定,能够保证纤维铺放工件的成型质量。
技术特征:1.一种纤维铺放机器人的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述为纤维铺放机器人的末端操作空间的动力学模型增加鲁棒控制律和滑模控制律,构建驱动力控制律,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据铺放轨迹的轨迹跟踪误差,设计鲁棒控制律和滑模控制律,包括:
4.根据权利要求3所述的方法,其特征在于,还包括:
5.根据权利要求2所述的方法,其特征在于,所述驱动力控制律为:
6.根据权利要求1所述的方法,其特征在于,还包括:
7.根据权利要求1所述的方法,其特征在于,还包括:
8.一种纤维铺放机器人的控制装置,其特征在于,所述装置包括:
9.一种计算机设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至7中任一项所述的纤维铺放机器人的控制方法。
技术总结本发明涉及智能控制技术领域,公开了纤维铺放机器人的控制方法、装置、设备及存储介质,该方法包括:为纤维铺放机器人的末端操作空间的动力学模型增加鲁棒控制律和滑模控制律,构建驱动力控制律;在纤维铺放机器人处于铺放工况的情况下,确定当前末端位置和期望铺放轨迹;根据驱动力控制律确定与当前末端位置和期望铺放轨迹相对应的末端驱动力;根据末端驱动力确定相应的关节驱动力矩,并根据关节驱动力矩控制纤维铺放机器人的铺丝头在末端操作空间的铺放轨迹。本发明采用力和位置的混合控制,不仅实现对铺放轨迹的精确跟踪,而且能够有效消除位置误差导致的铺放压力误差,从而可以保证末端铺放压力的恒定。技术研发人员:李婧受保护的技术使用者:济南浪潮数据技术有限公司技术研发日:技术公布日:2024/6/18本文地址:https://www.jishuxx.com/zhuanli/20240730/198084.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表