船载圆顶控制系统及其控制方法
- 国知局
- 2024-07-31 23:50:25
本发明涉及自动化系统,尤其涉及一种船载圆顶控制系统及其控制方法。
背景技术:
1、随着光测技术的不断发展,现有技术利用船载光电测量设备实现了对远离陆地的海上目标的测量。在光电测量设备的工作过程中,圆顶作为光电测量设备的保护装置发挥着极其重要的作用,即在天气状况恶劣或不满足光电测量设备的使用环境时,可以保护光电测量设备免受环境侵害,延长其使用寿命。目前,船载光电测量设备的圆顶主要按照陆基圆顶进行设计,并未考虑因船平台受海浪反复摇晃的影响,传统的船载圆顶跟随船载光电测量设备进行转动会造成传动机构的过度磨损等的问题。且船上工作人员需时刻关注磨损情况,并按时对传动机构和减速箱等进行维护和保养,除此之外,船上工作人员需时刻关注海面上的天气情况,如遇到突然间的降水、高湿、高盐雾、大风等极端天气时需紧急关闭圆顶天窗,极大的增加了船上工作人员的工作量。
技术实现思路
1、本发明为解决因船平台受海浪反复摇晃的影响,传统的船载圆顶跟随船载光电测量设备进行转动会造成传动机构的过度磨损等的问题,提供一种船载圆顶控制系统及其控制方法,能够快速获取船平台周围的气象条件和船平台本身的姿态信息,并利用船平台本身的姿态信息减少传动结构的损耗,节约人力成本。
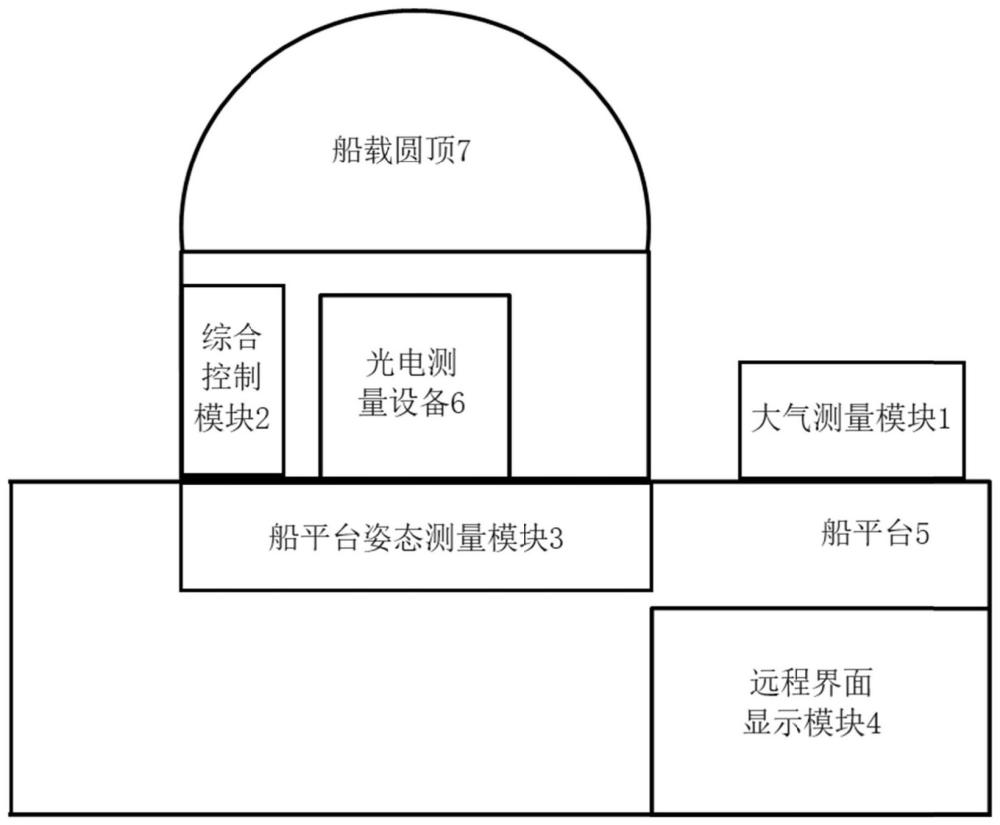
2、本发明提出的船载圆顶控制系统,用于实现光电测量设备与船载圆顶的同步转动,包括大气测量模块、综合控制模块、船平台姿态测量模块和远程界面显示模块,其中,
3、大气测量模块、船平台姿态测量模块和远程界面显示模块均安装于船平台上,且保证大气测量模块不受遮挡,综合控制模块安装于船载圆顶的内部;
4、大气测量模块用于实时监测船载圆顶的外部的气象信息,并将气象信息实时反馈至综合控制模块,船平台姿态测量模块用于实时采集船平台的姿态信息,并将姿态信息实时反馈至综合控制模块,综合控制模块用于结合姿态信息计算船载圆顶的目标旋转角速度,并根据气象信息实时开启或关闭船载圆顶,且将气象信息、目标旋转角速度、船载圆顶的旋转角度和实际旋转角速度发送至远程界面显示模块,远程界面用于存储并显示气象信息、目标旋转角速度、船载圆顶的旋转角度和实际旋转角速度。
5、优选地,大气测量模块包括温湿度计、风速计、空气盐雾测量计和大气激光雷达,其中,温湿度计用于实时测量船载圆顶的外部的温湿度;风速计用于实时测量船载圆顶的外部的风速;空气盐雾测量计用于实时测量船载圆顶的外部的酸碱度;大气激光雷达用于实时测量船载圆顶的外部的云层的高度、厚度和含水量。
6、优选地,综合控制模块包括数据采集单元、圆顶角度传感器、目标旋转角速度计算单元、数据传输单元和安全保护单元,其中,数据采集单元用于接收气象信息和姿态信息;圆顶角度传感器用于实时反馈船载圆顶的旋转角度;目标旋转角速度计算单元用于结合姿态信息,并根据圆顶角度传感器实时反馈的旋转角度计算船载圆顶的目标旋转角速度;数据传输单元用于向远程界面显示模块输送气象信息、目标旋转角速度、船载圆顶的旋转角度和实际旋转角速度,安全保护单元用于保护船载圆顶。
7、优选地,远程界面显示模块包括数据显示单元、数据接收单元和数据记录单元,其中,数据接收单元用于实时接收综合控制模块发送的气象信息、目标旋转角速度、船载圆顶的旋转角度和实际旋转角速度;数据记录单元用于存储气象信息、目标旋转角速度、船载圆顶的旋转角度和实际旋转角速度;数据显示单元用于实时显示气象信息、目标旋转角速度、船载圆顶的旋转角度和实际旋转角速度。
8、优选地,综合控制模块还包括气象预测单元和船载圆顶控制单元,其中,气象预测单元用于根据数据记录单元存储的气象信息预测未来气象;船载圆顶控制单元用于根据气象预测单元的预测结果提前关闭或开启船载圆顶,并根据数据显示单元的显示结果对船载圆顶的实际旋转角速度进行调整。
9、优选地,大气测量模块和综合控制模块的通信方式为串口通信,船平台姿态测量模块和综合控制模块的通信方式为网络通信,远程界面显示模块和综合控制模块的通信方式为网络通信。
10、优选地,姿态信息包括船平台的艏摇、纵摇、航速和航向。
11、本发明提供的船载圆顶控制系统的控制方法,利用船载圆顶控制系统实现,具体包括如下步骤:
12、s1:大气测量模块实时采集船载圆顶的外部的气象信息,并将气象信息实时反馈至综合控制模块,船平台姿态测量模块实时采集船平台的姿态信息,并将姿态信息实时反馈至综合控制模块;
13、s2:若气象信息符合光电测量设备的观测条件,则执行步骤s3,否则关闭船载圆顶,执行步骤s1;
14、s3:综合控制模块结合姿态信息计算船载圆顶的目标旋转角速度,并控制船载圆顶的实际旋转角速度与目标旋转角速度相同;
15、s4:重复步骤s1-s3,实现船载圆顶和光电测量设备的同步转动。
16、优选地,步骤s3具体包括如下步骤:
17、s31:若船平台的艏摇值和纵摇值均小于船载圆顶的天窗开孔角度最大值,则执行步骤s33,否则执行步骤s32;
18、s32:根据圆顶角度传感器实时反馈的旋转角度计算船载圆顶的目标旋转角速度:
19、vθ=[(ai-δaj)-(ai-δai)]·f;
20、其中,vθ为目标旋转角速度,θ为旋转角度值,f为船平台姿态测量模块的采集频率,ai为圆顶角度传感器在第i时刻输出的旋转角度,aj为圆顶角度传感器在第j时刻输出的旋转角度,δai为第i时刻与前一时刻的旋转角度差,δaj为第j时刻与前一时刻的旋转角度差;
21、s33:若气象预测单元的预测结果符合光电测量设备的观测条件,则执行步骤s34,否则关闭船载圆顶,执行步骤s1;
22、s34:若实际旋转角速度与目标旋转角速度相同,则执行步骤s4,否则执行步骤s35;
23、s35:利用船载圆顶控制单元对船载圆顶的实际旋转角速度进行调整,使实际旋转角速度与目标旋转角速度相同。
24、与现有技术相比,本发明能够取得如下有益效果:
25、本发明通过设置大气测量模块和气象预测单元,实现了对船载圆顶外部的气象信息的采集和预测,减少了船上工作人员的操作压力,同时,通过设置船平台姿态测量模块和目标旋转角速度计算单元,实现了对船载圆顶的目标旋转角速度的计算,减小了船载圆顶在运转时对传动结构的磨损。
技术特征:1.一种船载圆顶控制系统,用于实现光电测量设备与船载圆顶的同步转动,其特征在于,包括大气测量模块、综合控制模块、船平台姿态测量模块和远程界面显示模块,其中,
2.根据权利要求1所述的船载圆顶控制系统,其特征在于,所述大气测量模块包括温湿度计、风速计、空气盐雾测量计和大气激光雷达,其中,所述温湿度计用于实时测量所述船载圆顶的外部的温湿度;所述风速计用于实时测量所述船载圆顶的外部的风速;所述空气盐雾测量计用于实时测量所述船载圆顶的外部的酸碱度;所述大气激光雷达用于实时测量所述船载圆顶的外部的云层的高度、厚度和含水量。
3.根据权利要求1所述的船载圆顶控制系统,其特征在于,所述综合控制模块包括数据采集单元、圆顶角度传感器、目标旋转角速度计算单元、数据传输单元和安全保护单元,其中,所述数据采集单元用于接收所述气象信息和所述姿态信息;所述圆顶角度传感器用于实时反馈所述船载圆顶的旋转角度;所述目标旋转角速度计算单元用于结合所述姿态信息,并根据所述圆顶角度传感器实时反馈的旋转角度计算所述船载圆顶的目标旋转角速度;所述数据传输单元用于向所述远程界面显示模块输送所述气象信息、所述目标旋转角速度、所述船载圆顶的旋转角度和实际旋转角速度,所述安全保护单元用于保护所述船载圆顶。
4.根据权利要求3所述的船载圆顶控制系统,其特征在于,所述远程界面显示模块包括数据显示单元、数据接收单元和数据记录单元,其中,所述数据接收单元用于实时接收所述综合控制模块发送的所述气象信息、所述目标旋转角速度、所述船载圆顶的旋转角度和实际旋转角速度;所述数据记录单元用于存储所述气象信息、所述目标旋转角速度、所述船载圆顶的旋转角度和实际旋转角速度;所述数据显示单元用于实时显示所述气象信息、所述目标旋转角速度、所述船载圆顶的旋转角度和实际旋转角速度。
5.根据权利要求4所述的船载圆顶控制系统,其特征在于,所述综合控制模块还包括气象预测单元和船载圆顶控制单元,其中,所述气象预测单元用于根据所述数据记录单元存储的气象信息预测未来气象;所述船载圆顶控制单元用于根据所述气象预测单元的预测结果提前关闭或开启所述船载圆顶,并根据所述数据显示单元的显示结果对所述船载圆顶的实际旋转角速度进行调整。
6.根据权利要求1所述的船载圆顶控制系统,其特征在于,所述大气测量模块和所述综合控制模块的通信方式为串口通信,所述船平台姿态测量模块和所述综合控制模块的通信方式为网络通信,所述远程界面显示模块和所述综合控制模块的通信方式为网络通信。
7.根据权利要求1所述的船载圆顶控制系统,其特征在于,所述姿态信息包括所述船平台的艏摇、纵摇、航速和航向。
8.一种船载圆顶控制系统的控制方法,利用权利要求1-7中任意一项所述的船载圆顶控制系统实现,其特征在于,具体包括如下步骤:
9.根据权利要求8所述的船载圆顶控制系统的控制方法,其特征在于,所述步骤s3具体包括如下步骤:
技术总结本发明涉及自动化系统技术领域,尤其涉及一种船载圆顶控制系统及其控制方法。系统包括:大气测量模块、综合控制模块、船平台姿态测量模块、远程界面显示模块,其中,大气测量模块用于实时监测船载圆顶的外部的气象信息,并将气象信息实时反馈至综合控制模块,船平台姿态测量模块用于实时采集船平台的姿态信息,并将姿态信息实时反馈至综合控制模块,综合控制模块用于结合姿态信息计算船载圆顶的目标旋转角速度,并根据气象信息实时开启或关闭船载圆顶,远程界面用于存储并显示气象信息、目标旋转角速度、船载圆顶的旋转角度和和实际旋转角速度。本发明能够减少传动结构的损耗,节约人力成本。技术研发人员:许海斌,葛兵,管佩琛,蔡立华,余毅,初威澄受保护的技术使用者:中国科学院长春光学精密机械与物理研究所技术研发日:技术公布日:2024/6/23本文地址:https://www.jishuxx.com/zhuanli/20240730/198773.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表