基于S型速度曲线的割草机速度规划与控制方法、系统、装置、存储介质及骑乘式割草机与流程
- 国知局
- 2024-07-31 23:50:22
本发明涉及割草机自动控制,特别是涉及一种基于s型速度曲线的割草机速度规划与控制方法、系统、装置、存储介质及骑乘式割草机。
背景技术:
1、割草机是一种用于收割牧草和修剪草坪的机械设备,它可将牧草和园林中的杂草进行切割。割草机按行走方式可分为手持式割草机、手推式割草机、骑乘式割草机和智能割草机(无人操控的自动式割草机),其中,骑乘式割草机适用于较大面积的草坪的修剪。
2、无人操控的智能割草机的常采用工字型规划路径,沿直线路径运行非常普遍,多采用梯形速度曲线规划算法来规划自动驾驶过程中的行驶速度,此种方式控制简单,但其加速度不连续,在加、减速阶段与匀速阶段的衔接处,存在突变的情况,这会对割草机造成冲击,长期下来会造成割草机寿命下降。
3、目前,在骑乘式割草机中,主要采用人工驾驶,速度由驾驶员来控制。具备高级辅助驾驶系统的骑乘式割草机,在行驶过程中需要驾驶员乘坐,如果采用智能割草机所采用的梯形速度曲线规划算法来规划辅助驾驶(自动驾驶)过程中的行驶速度,由于冲击的存在,非常影响驾驶员的驾乘舒适性。
4、其他应用领域的自动化移动设备(例如机械臂),通常采用s型速度曲线规划算法来规划设备移动速度。s型速度曲线规划算法的核心思想是让加速度不产生突变,从而使被控对象的速度控制具有快速、平稳的特性。但是,其他应用领域的自动化移动设备采用的s型速度曲线,通常将初速度和末速度默认为零,然而在骑乘式割草机实际作业中,前一条路径与后一条路径之间的速度(进行路径转换时的速度)并不为零,因此现有的s型速度曲线规划算法无法适用于骑乘式割草机。
5、综上所述可知,如何规划和控制骑乘式割草机在辅助驾驶过程中的行驶速度以降低行驶速度变化对骑乘式割草机和驾驶员的冲击,是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的目的在于提供一种基于s型速度曲线的割草机速度规划与控制方法、系统、装置、存储介质及骑乘式割草机,以降低对骑乘式割草机和驾驶员的冲击。
2、为了实现本发明的上述目的,根据本发明的第一个方面,本发明提供了一种基于s型速度曲线的割草机速度规划与控制方法,应用于骑乘式割草机,所述骑乘式割草机具有自动驾驶模式,其中,在所述自动驾驶模式下,所述骑乘式割草机能够按照预先规划的作业路线自动行走作业,所述方法包括:
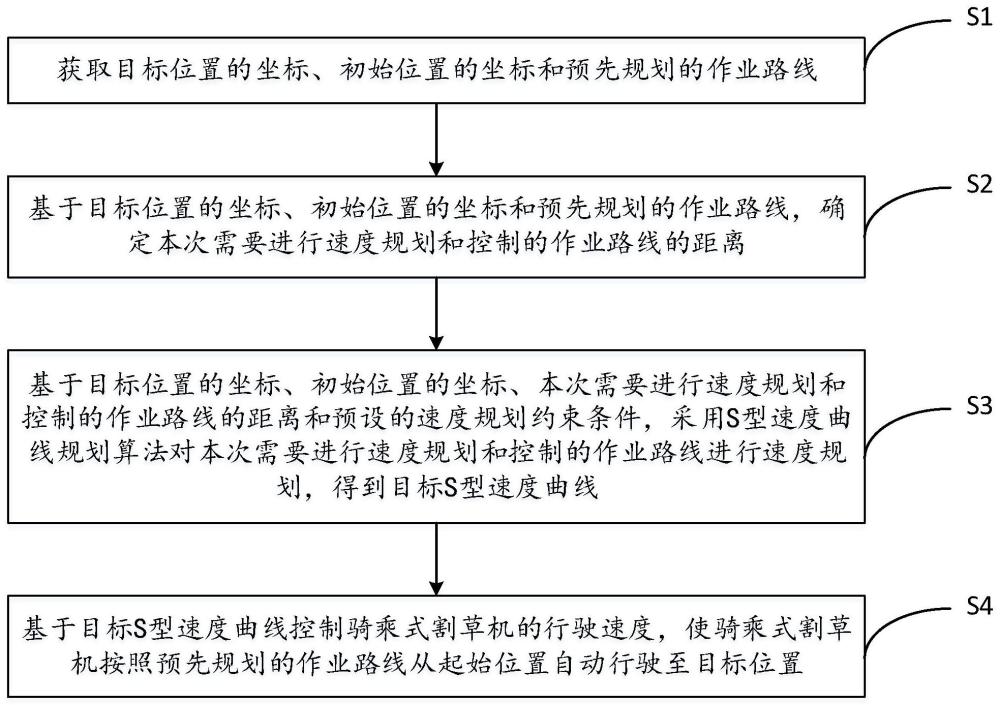
3、s1,获取目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)和预先规划的作业路线,其中,所述目标位置为所述骑乘式割草机的本次速度规划的终点,初始位置为所述骑乘式割草机的本次速度规划的起点;
4、s2,基于所述目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)和预先规划的作业路线,确定本次需要进行速度规划和控制的作业路线的距离smove;
5、s3,基于所述目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)、本次需要进行速度规划和控制的作业路线的距离smove和预设的速度规划约束条件,采用s型速度曲线规划算法对本次需要进行速度规划和控制的作业路线进行速度规划,得到目标s型速度曲线;
6、s4,基于所述目标s型速度曲线控制所述骑乘式割草机的行驶速度,使所述骑乘式割草机按照预先规划的作业路线从所述起始位置自动行驶至所述目标位置。
7、优选地,所述速度规划约束条件包括:
8、骑乘式割草机的预设最大加加速度jmax、预设最大加速度amax、预设最大速度vmax、预设的末速度ve和骑乘式割草机的初速度vs,其中,所述骑乘式割草机的初速度是指所述骑乘式割草机在所述初始位置的速度。
9、优选地,步骤s3中,所述采用s型速度曲线规划算法对本次需要进行速度规划和控制的作业路线进行速度规划,得到目标s型速度曲线包括:
10、s31,采用s型速度曲线规划算法将用于对骑乘式割草机进行速度控制的s型速度曲线划分七个速度控制段,所述七个速度控制段包括依次连接的加加速段、匀加速段、减加速度段、匀速段、加减速段、匀减速段和减减速段,其中,
11、所述加加速段,加加速度为jmax,加速度线性增加至最大值amax;
12、所述匀加速段,加加速度为0,以恒定的加速度amax加速;
13、所述减加速度,以恒定的加加速度-jmax使加速度从amax减小到0;
14、所述匀速段,以恒定的速度vmax匀速运动;
15、所述加减速段,以恒定的加加速度-jmax使加速度从0减小到-amax;
16、所述匀减速段,加加速度为0,以恒定的加速度-amax减速;
17、所述减减速段,以恒定的加加速度jmax使加速度从-amax增加到0;
18、s32,基于所述目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)、本次需要进行速度规划和控制的作业路线的距离smove和预设的速度规划约束条件,确定所述s型速度曲线中的加加速段持续时间t1、匀加速段持续时间t2、减加速度持续时间t3、匀速段持续时间t4、加减速段持续时间t5、匀减速段持续时间t6和减减速段持续时间t7、所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大速度vlim和所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大加速度alim;
19、s33,根据所述目标s型速度曲线中的加加速段持续时间t1、匀加速段持续时间t2、减加速度持续时间t3、匀速段持续时间t4、加减速段持续时间t5、匀减速段持续时间t6、减减速段持续时间t7、所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大速度vlim和所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大加速度alim,计算所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中各个时刻的速度;
20、s34,基于所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中各个时刻的速度生成所述目标s型速度曲线。
21、优选地,步骤s4中,所述基于所述目标s型速度曲线控制所述骑乘式割草机的行驶速度包括:
22、s41,获取所述骑乘式割草机的当前位置的坐标p(x,y);
23、s42,基于所述骑乘式割草机的当前位置的坐标p(x,y)和所述目标位置的坐标p1(x1,y1)计算本次需要进行速度规划和控制的作业路线中截止到当前时刻t的剩余距离s;
24、s43,基于本次需要进行速度规划和控制的作业路线中截止到当前时刻t的剩余距离s和预设的判断条件,判断所述骑乘式割草机当前时刻t所属的速度控制段;
25、s44,基于所述目标s型速度曲线中所述当前时刻t所属的速度控制段对所述骑乘式割草机的当前行驶速度v进行控制。
26、优选地,步骤s44中,所述基于所述目标s型速度曲线中所述当前时刻t所属的速度控制段对所述骑乘式割草机的当前行驶速度v进行控制包括:
27、s441,基于所述目标s型速度曲线中所述当前时刻对应的速度控制段确定所述当前时刻对应的规划速度;
28、s442,基于所述目标s型速度曲线确定所述骑乘式割草机在所述当前时刻的规划累积行驶距离;
29、s443,基于所述当前时刻的规划累积行驶距离、本次需要进行速度规划和控制的作业路线中截止到当前时刻t的剩余距离s和本次需要进行速度规划和控制的作业路线的距离smove,计算所述骑乘式割草机在当前时刻t的行驶距离偏差值;
30、s444,基于所述骑乘式割草机在当前时刻t的行驶距离偏差值,采用pid闭环控制算法计算所述骑乘式割草机在所述当前时刻t所需的速度补偿值;
31、s445,基于所述当前时刻t对应的规划速度和所述当前时刻t所需的速度补偿值确定所述骑乘式割草机在当前时刻t的目标速度;
32、s446,控制所述骑乘式割草机在所述当前时刻t以所述目标速度行驶。
33、根据本发明的第二个方面,本发明提供了一种基于s型速度曲线的割草机速度规划与控制系统,应用于骑乘式割草机,所述骑乘式割草机具有自动驾驶模式,其中,在所述自动驾驶模式下,所述骑乘式割草机能够按照预先规划的作业路线自动行走作业,所述系统包括:
34、基础参数获取模块,用于获取目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)和预先规划的作业路线,其中,所述目标位置为所述骑乘式割草机的本次速度规划的终点,初始位置为所述骑乘式割草机的本次速度规划的起点;
35、规划距离确定模块,用于基于所述目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)和预先规划的作业路线,确定本次需要进行速度规划和控制的作业路线的距离smove;
36、s型速度曲线规划模块,用于基于所述目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)、本次需要进行速度规划和控制的作业路线的距离smove和预设的速度规划约束条件,采用s型速度曲线规划算法对本次需要进行速度规划和控制的作业路线进行速度规划,得到目标s型速度曲线;
37、行驶速度控制模块,用于基于所述目标s型速度曲线控制所述骑乘式割草机的行驶速度,使所述骑乘式割草机按照预先规划的作业路线从所述起始位置自动行驶至所述目标位置。
38、优选地,所述速度规划约束条件包括:
39、骑乘式割草机的预设最大加加速度jmax、预设最大加速度amax、预设最大速度vmax、预设的末速度ve和骑乘式割草机的初速度vs,其中,所述骑乘式割草机的初速度是指所述骑乘式割草机在所述初始位置的速度。
40、优选地,所述s型速度曲线规划模块在执行采用s型速度曲线规划算法对本次需要进行速度规划和控制的作业路线进行速度规划,得到目标s型速度曲线时具体用于:
41、采用s型速度曲线规划算法将用于对骑乘式割草机进行速度控制的s型速度曲线划分七个速度控制段,所述七个速度控制段包括依次连接的加加速段、匀加速段、减加速度段、匀速段、加减速段、匀减速段和减减速段,其中,
42、所述加加速段,加加速度为jmax,加速度线性增加至最大值amax;
43、所述匀加速段,加加速度为0,以恒定的加速度amax加速;
44、所述减加速度,以恒定的加加速度-jmax使加速度从amax减小到0;
45、所述匀速段,以恒定的速度vmax匀速运动;
46、所述加减速段,以恒定的加加速度-jmax使加速度从0减小到-amax;
47、所述匀减速段,加加速度为0,以恒定的加速度-amax减速;
48、所述减减速段,以恒定的加加速度jmax使加速度从-amax增加到0;
49、基于所述目标位置的坐标p1(x1,y1)、初始位置的坐标p0(x0,y0)、本次需要进行速度规划和控制的作业路线的距离smove和预设的速度规划约束条件,确定所述s型速度曲线中的加加速段持续时间t1、匀加速段持续时间t2、减加速度持续时间t3、匀速段持续时间t4、加减速段持续时间t5、匀减速段持续时间t6和减减速段持续时间t7、所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大速度vlim和所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大加速度alim;
50、根据所述目标s型速度曲线中的加加速段持续时间t1、匀加速段持续时间t2、减加速度持续时间t3、匀速段持续时间t4、加减速段持续时间t5、匀减速段持续时间t6、减减速段持续时间t7、所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大速度vlim和所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中能够达到的实际最大加速度alim,计算所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中各个时刻的速度;
51、基于所述骑乘式割草机在本次需要进行速度规划和控制的作业路线中各个时刻的速度生成所述目标s型速度曲线。
52、优选地,所述行驶速度控制模块在执行基于所述目标s型速度曲线控制所述骑乘式割草机的行驶速度时具体用于:
53、获取所述骑乘式割草机的当前位置的坐标p(x,y);
54、基于所述骑乘式割草机的当前位置的坐标p(x,y)和所述目标位置的坐标p1(x1,y1)计算本次需要进行速度规划和控制的作业路线中截止到当前时刻t的剩余距离s;
55、基于本次需要进行速度规划和控制的作业路线中截止到当前时刻t的剩余距离s和预设的判断条件,判断所述骑乘式割草机当前时刻t所属的速度控制段;
56、基于所述目标s型速度曲线中所述当前时刻t所属的速度控制段对所述骑乘式割草机的当前行驶速度v进行控制。
57、优选地,所述基于所述目标s型速度曲线中所述当前时刻t所属的速度控制段对所述骑乘式割草机的当前行驶速度v进行控制包括:
58、基于所述目标s型速度曲线中所述当前时刻对应的速度控制段确定所述当前时刻对应的规划速度;
59、基于所述目标s型速度曲线确定所述骑乘式割草机在所述当前时刻的规划累积行驶距离;
60、基于所述当前时刻的规划累积行驶距离、本次需要进行速度规划和控制的作业路线中截止到当前时刻t的剩余距离s和本次需要进行速度规划和控制的作业路线的距离smove,计算所述骑乘式割草机在当前时刻t的行驶距离偏差值;
61、基于所述骑乘式割草机在当前时刻t的行驶距离偏差值,采用pid闭环控制算法计算所述骑乘式割草机在所述当前时刻t所需的速度补偿值;
62、基于所述当前时刻t对应的规划速度和所述当前时刻t所需的速度补偿值确定所述骑乘式割草机在当前时刻t的目标速度;
63、控制所述骑乘式割草机在所述当前时刻t以所述目标速度行驶。
64、根据本发明的第三个方面,本发明提供了一种基于s型速度曲线的割草机速度规划与控制装置,包括存储器、处理器以及存储于所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,实现上述第一个方面所述的任意一种基于s型速度曲线的割草机速度规划与控制方法。
65、根据本发明的第四个方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时,实现上述第一个方面所述的任意一种基于s型速度曲线的割草机速度规划与控制方法。
66、根据本发明的第五个方面,本发明提供了一种骑乘式割草机,包括上述第三个方面所述的基于s型速度曲线的割草机速度规划与控制装置。
67、由以上技术方案可知,本发明提供了一种基于s型速度曲线的割草机速度规划与控制方法、系统、装置、存储介质及骑乘式割草机,通过获取目标位置的坐标、初始位置的坐标和预先规划的作业路线;基于所述目标位置的坐标、初始位置的坐标和预先规划的作业路线,确定本次需要进行速度规划和控制的作业路线的距离;基于所述目标位置的坐标、初始位置的坐标、本次需要进行速度规划和控制的作业路线的距离和预设的速度规划约束条件,采用s型速度曲线规划算法对本次需要进行速度规划和控制的作业路线进行速度规划,得到目标s型速度曲线;基于所述目标s型速度曲线控制所述骑乘式割草机的行驶速度,使所述骑乘式割草机按照预先规划的作业路线从所述起始位置自动行驶至所述目标位置,从而在骑乘式割草机处于自动驾驶模式时,基于s型速度曲线对割草机自动行驶过程中的速度进行规划与控制,有效降低行驶速度变化对骑乘式割草机和驾驶员的冲击。
68、本发明通过对现有的s型速度曲线规划算法进行改进,使其能够适用于骑乘式割草机在自动驾驶时初速度和末速度不为零的应用场景,并基于改进后的s型速度曲线规划算法来对骑乘式割草机在自动驾驶时的速度规划与控制策略进行改进,有效降低在自动驾驶模式下割草机行驶速度变化对骑乘式割草机和驾驶员的冲击,解决了现有技术中采用梯形速度曲线规划算法来规划自动驾驶过程中的行驶速度突变而存在冲击导致的影响割草机使用寿命和驾驶员的驾乘舒适性的问题,也解决了现有的s型速度曲线规划算法无法适用于骑乘式割草机的问题。
69、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240730/198768.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。