一种基于事件触发的多智能体追逃控制方法及系统
- 国知局
- 2024-08-01 00:02:32
本发明属于多智能体控制策略,涉及一种基于事件触发的多智能体追逃控制方法及系统。
背景技术:
1、经过几十年的研究,博弈论已经在众多领域中得到了广泛的研究和应用,例如社会学与经济学、航空航天、通信工程、控制工程等。同样的,博弈论也为多智能体工程问题提供了有效的解决工具。在多智能体博弈系统中,每个智能体都是一个自私的决策者,他们会尽力优化自己的目标函数,而每个智能体的目标函数之间又存在着耦合关系。已有的应用包括城市交通协调控制、无线通信、智能电网、多智能体的控制问题等。
2、但是现有的多智能博弈系统主要是一个连续性的触发系统,控制频率高,不仅硬件的需求度高,且对能量消耗比较大,也使得系统计算负载比较大。
技术实现思路
1、本发明的目的在于解决现有技术中系统的控制频率高,对能量消耗比较大的问题,提供一种基于事件触发的多智能体追逃控制方法及系统。
2、为达到上述目的,本发明采用以下技术方案予以实现:
3、一种基于事件触发的多智能体追逃控制方法,包括以下步骤:
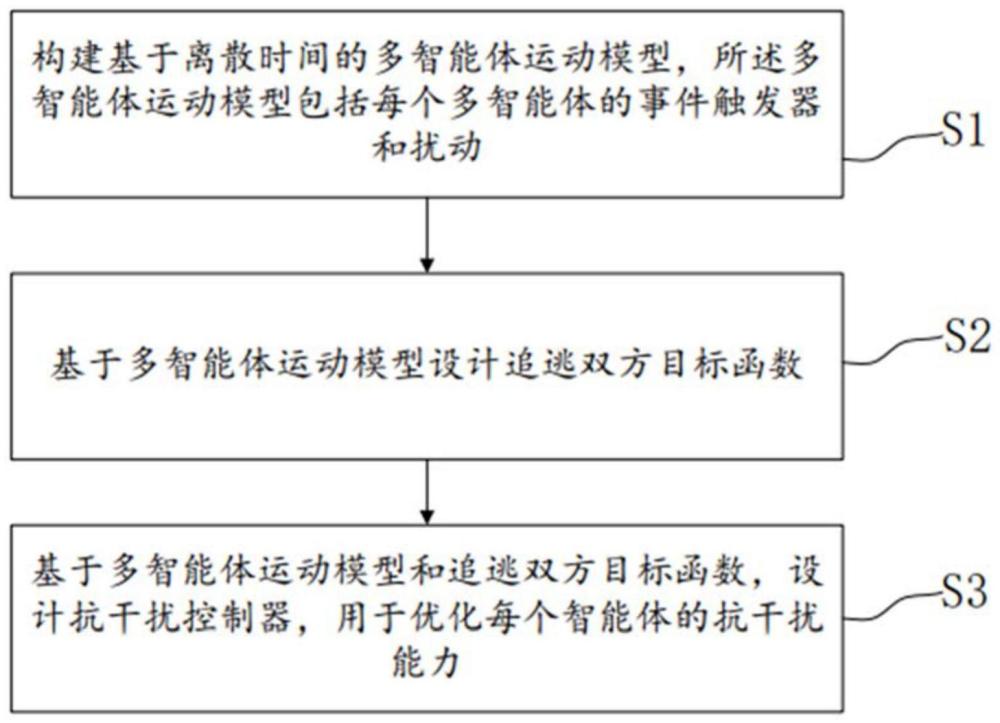
4、构建基于离散时间的多智能体运动模型,所述多智能体运动模型包括每个多智能体的事件触发器和扰动;
5、基于多智能体运动模型设计追逃双方目标函数;
6、基于多智能体运动模型和追逃双方目标函数,获取扰控制器,用于优化每个智能体的抗干扰能力。
7、本发明的进一步改进在于:
8、所述多智能体运动模型为:
9、
10、其中xi为智能体在地面参考系下的坐标,ui是控制输入量,ak,bk,dk为时变矩阵,f(xk)为干扰。
11、所述事件触发器为:
12、定义控制信号序列对于当时,其中,
13、
14、
15、
16、σi为一常数,0<σi<1。
17、所述追逃双方目标函数为:
18、
19、
20、其中,xn表示博弈结束时的状态;ri为一实正定矩阵。
21、对于追击方来说:
22、
23、对于逃脱方来说:
24、
25、其中,qij,wij为实正定矩阵,i,j∈p;k,l∈e。所述抗干扰控制器为:
26、
27、其中,kk表示反馈增益,xk表示系统状态。所述反馈增益kk的求解包括:
28、
29、定义权重矩阵:
30、
31、通过该迭代式解出p之后,定义:
32、
33、进一步得到:
34、
35、求解kk即可得到控制器增益,进一步获取抗干扰控制。
36、一种基于事件触发的多智能体追逃控制系统,包括:
37、多智能体运动模型构建模块,用于构建基于离散时间的多智能体运动模型,所述多智能体运动模型包括每个多智能体的事件触发器和扰动;
38、追逃双方目标函数构建模块,用于基于多智能体运动模型设计追逃双方目标函数;
39、抗干扰控制器构建模块,用于基于多智能体运动模型和追逃双方目标函数,获取抗干扰控制器,用于优化每个智能体的抗干扰能力。
40、一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明任一项所述方法的步骤。
41、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现本发明任一项所述方法的步骤。
42、与现有技术相比,本发明具有以下有益效果:
43、本发明公开了一种基于事件触发的多智能体追逃控制方法,本方法考虑了控制器的事件触发功能,有效地降低了控制器的触发频率,相比于传统的控制策略,本发明设计的控制器在不改变原有控制效率的同时,降低了智能体内部的计算负担,从而提高了智能体内部硬件的控制性能,减少了对能量的消耗。在星上传感器检测装置受太空环境中太阳光压、电磁干扰影响检测到数据具有异常情况时,该方法可以实现对卫星状态的精确估计,有效避免由于异常野值对星上器件造成的破坏。
技术特征:1.一种基于事件触发的多智能体追逃控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于事件触发的多智能体追逃控制方法,其特征在于,所述多智能体运动模型为:
3.根据权利要求1所述的一种基于事件触发的多智能体追逃控制方法,其特征在于,所述事件触发器为:
4.根据权利要求1所述的一种基于事件触发的多智能体追逃控制方法,其特征在于,所述追逃双方目标函数为:
5.根据权利要求4所述的一种基于事件触发的多智能体追逃控制方法,其特征在于,对于追击方来说:
6.根据权利要求1所述的一种基于事件触发的多智能体追逃控制方法,其特征在于,所述抗干扰控制器为:
7.根据权利要求6所述的一种基于事件触发的多智能体追逃控制方法,其特征在于,所述反馈增益kk的求解包括:
8.一种基于事件触发的多智能体追逃控制系统,其特征在于,包括:
9.一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-7任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7任一项所述方法的步骤。
技术总结本发明实施例公开了一种基于事件触发的多智能体追逃控制方法及系统,包括以下步骤:构建基于离散时间的多智能体运动模型,所述多智能体运动模型包括每个多智能体的事件触发器和扰动;基于多智能体运动模型设计追逃双方目标函数;基于多智能体运动模型和追逃双方目标函数,设计抗干扰控制器,用于优化每个智能体的抗干扰能力。本发明考虑了控制器的事件触发功能,有效地降低了控制器的触发频率,相比于传统的控制策略,本发明设计的控制器在不改变原有控制效率的同时,降低了智能体内部的计算负担,从而提高了智能体内部硬件的控制性能。技术研发人员:袁欢欢,王翔宇,袁源受保护的技术使用者:西北工业大学技术研发日:技术公布日:2024/7/4本文地址:https://www.jishuxx.com/zhuanli/20240730/199510.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。