一种变电站无人机自动巡检系统及方法与流程
- 国知局
- 2024-08-01 00:03:38
本发明涉及变电站状态监测和缺陷监测安全方向,特别是涉及一种变电站无人机自动巡检系统及方法。
背景技术:
1、为实现安全可靠的供电目标,需要对电网进行定期检查。人工检测方式实地考察设备的运行情况,巡检结果精准合理,但效率慢。目前变电站巡检普遍采用“人工为主、机器人为、辅”的巡检模式,机器人辅助巡视一定程度上缓解了运维人员的巡检压力,提高了发现设备缺陷的能力。由于变电站内环境复杂、设备种类众多且纵横交错,且巡检路径上存在各种障碍物,这对无人机的障碍物的处理能力和最优路径寻优能力提出了很大的挑战。
2、国内涉及电力行业无人机巡检路径优化的专利有“一种无人机配电网巡检路线生成方法”(202311082618.2),该发明根据重点杆塔位置,以及无人机参数(能耗、时间、航程),计算起降点位置并优化构建配电网巡视路线,并根据巡检范围内故障预测点位快速选择最优机型和最优巡检线路,有效提高巡检效率。国内专利“一种巡检无人机路径规划系统”(202111605225.6),该系统包括无人机控制单元、路线规划单元、续航单元、巡检单元、预警单元和通讯单元,有效规划出可行路线,实现大范围对复杂地形的巡检。
3、在最优路径的规划中,由于复杂的障碍物环境(通道狭窄、障碍物密集),会导致计算量暴增,现有的算法规划路径慢同时成功率不高,而这限制了算法的推广和落地。针对以上难题,本专利提出了一种变电站无人机自动巡检系统及方法,用以实现快速有效的规划无人机巡检最优路径,提升巡检效率,第一时间发现故障,保障用电安全。
技术实现思路
1、为解决上述问题,本发明在bi-rrt算法的基础上,提出了一种变电站无人机自动巡检系统及方法(fast sparse bi-rrt,fsbi-rrt,fsbi-rrt)。针对复杂的障碍物环境(通道狭窄、障碍物密集)导致计算量暴增,现有的算法规划路径慢同时成功率不高的问题,本专利提出了快速稀疏bi-rrt(fast sparse bi-rrt,fsbi-rrt)算法,该算法中提出了局部稀疏节点策略、方向自学习策略和二分贪心剪枝优化策略用以进行算法加速,其中局部稀疏节点策略在路径搜索过程中实现对数据节点的核查,完成数据的降维;方向自学习策略,通过算法确定搜索方向,从而限制算法的随机搜索以避免无效计算;二分贪心剪枝优化策略进行最终路径的优化,加快优化点的搜索,提升算法效率。
2、为达此目的,本发明提供一种变电站无人机自动巡检方法,具体步骤如下:
3、步骤1:搭建无人机巡检系统,其中整个系统中包括:无人机及机巢、分析主机和站端巡视主机、安全接入模块和交换机;
4、步骤2:利用提出的fsbi-rrt算法求解最优路径,然后控制无人机进行巡检,并将采集的数据通过安全接入模块和交换机连接站端巡检主机完成数据的回传;
5、步骤3:分析主机对回传的数据进行分析,然后得出当前变电站设备状态和缺陷并进行告警;
6、步骤4:对状态错误或缺陷的检测结果,运维人员进行处理,从而消减变电站风险。
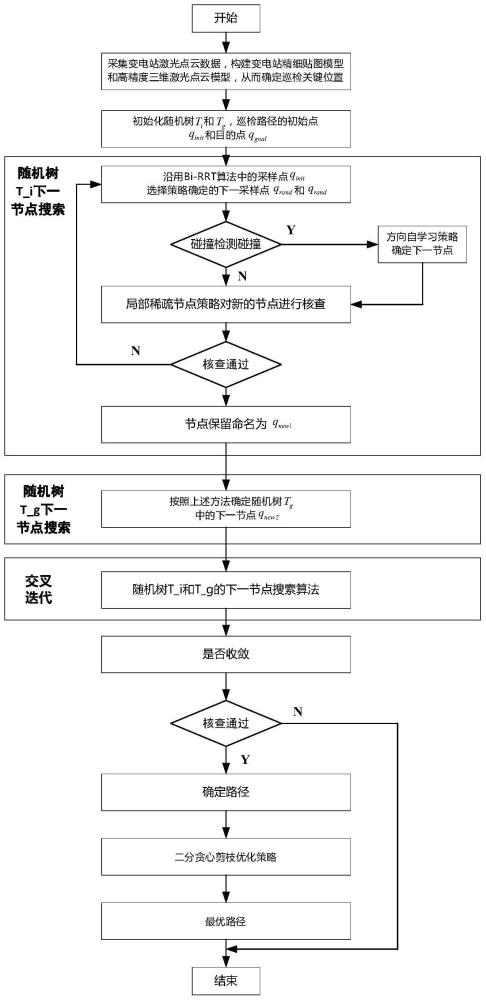
7、作为本发明进一步改进,步骤2中fsbi-rrt算法的具体步骤如下,其特征在于:
8、步骤2.1,采集变电站激光点云数据,构建变电站精细贴图模型和三维激光点云模型,从而确定巡检关键位置;
9、步骤2.2,在确定的状态空间中,初始化随机树ti、tg,qinit和qgoal分别表示巡检路径的初始点和目的点,在bi-rrt算法中,qinit和qgoal分别设置为ti和tg的根节点,fsbi-rrt保持一致,并对迭代次数、搜索步长和最短节点间距的参数进行赋值;
10、步骤2.3.沿用bi-rrt算法中的采样点选择策略确定qinit的下一采样点qrand,而后查找ti中离qrand欧氏距离最小的节点,并以之为下一节点,记为qnear1,接着以qnear1作为起始搜索点,顺着qrand指向移动一个搜索步长以确定新的节点qnew1;
11、步骤2.4.连接qnew1和qnear1,检测是否和障碍物存在碰撞,如果不存在则利用提出的局部稀疏节点策略对qnew1进行核查,核查通过后确定该点为路径上的优化点,如果不通过,则丢弃;如果存在碰撞,利用提出的方向自学习策略确定下一节点,而后用局部稀疏节点策略进行核查,核查通过保留不通过则丢弃并重新进入步骤2.2否则进入步骤2.5;
12、步骤2.5.以qnew1为起始点,按照步骤2.3~2.4中所述方法确定随机树tg中的qnear2和qnew2;
13、步骤2.6,交替进行步骤2.3~2.4和步骤2.5,迭代收敛的准则为:随机树tg和ti对应的最短节点间距小于设置的阈值同时局部稀疏节点策略核查连接线满足条件,最终获得初步的巡检路线。
14、步骤2.7,利用二分贪心剪枝优化策略对初始巡检路线进行优化,从而最终确定最优的巡检路线。
15、作为本发明进一步改进,步骤2.4中局部稀疏节点策略的具体描述为:
16、对通过碰撞检测且确定为的新节点的qnew来说,计算其与父节点qparent的欧氏距离,记为ξ,遍历随机树中的其它节点确定最近的节点qnearest,若qnew和qnearest的欧式距离小于ξ,则表示该两点过于密集,基于稀疏性原则,需要丢弃节点qnearest,反之保留并刷新随机数的节点。
17、作为本发明进一步改进,步骤2.4中方向自学习策略的具体描述为:
18、在fsbi-rrt算法中,下一节点的生长有以下三种情况:1)随机生长;2)向目标节点生长;3)沿着原有的路径走势方向生长,对应的概率可分别表示为pr、pg和pp,其中:
19、pr+pg+pp=1
20、从中看出该三种概率之和为1,所以随机生长的概率pr和pg+pp进行零和博弈,当pg和pp增长时,fsbi-rrt对无用节点的搜索也会大大的降低;
21、接着,对节点和概率进行随机用以确认新节点qnew,qnew的选择函数可表示为:
22、
23、其中,p表示[0,1]范围的随机数,i表示[1,n]范围的随机整数,n为方向自学习中节点总数;
24、针对节点qnear生长新节点qnew,在综合考虑qrand、qgoal和qpath,i的影响后,设计了随机数的生长函数f(qnear),表达式为:
25、f(qnear)=ρ(f(qnew)+kgf(qgoal)+kpf(qpath,i))
26、式中,ρ表示步长,kg和kp表示引力权重和路径自学习权重,函数f(qnew)、f(qgoal)和f(qpath,i)分别表示qnear朝向qnew、qgoal和qpath,i节点的方向,具体表达为:
27、
28、
29、
30、由上式可知,f(qgoal)和f(qpath,i)分别记录了qnear朝向qgoal和预先自学习的节点方向,可以有效的指导随机树的生长,进而降低随机抽样概率以避免无效计算,|| ||表示欧式距离。
31、作为本发明进一步改进,步骤2.7中二分贪心剪枝优化策略的具体描述为:
32、步骤2.7.1.对确定的各搜索节点q1、q2、q3…qn-1、qn,确定该搜索节点的二分节点[]表示取整运算,具体步骤如下:
33、步骤2.7.1.1.q1和之间的连线和障碍物不存在碰撞,则以作为下一搜索的初始点,继续按照二分贪心搜索;
34、步骤2.7.1.2.若步骤2.7.1.1存在碰撞,则按照顺序进行碰撞监测,找到未碰撞的点即结束搜索,并以搜索到的点作为新的起点重新按照步骤2.7.1.1进行搜索;
35、步骤2.7.1.3.若步骤2.7.1.1和步骤2.7.1.2都存在碰撞,将搜索区间减为并进入步骤2.7.1.1继续搜索,如果一直搜索不到满足条件的点,则当前点不存在优化空间,对所要优化路径中该点的下一个点进行搜索。
36、步骤2.7.1.4.重复步骤2.7.1.1~步骤2.7.1.2直至搜索到qn。
37、步骤2.7.2.在确定下一剪枝优化点后,以该剪枝优化点为起始点重复步骤2.7.1,以确定下一个剪枝点;
38、步骤2.7.3.重复步骤2.7.2,直至确定的剪枝点即为qn。
39、本发明还提供一种变电站无人机自动巡检系统,包括无人机及机巢、分析主机和站端巡视主机、安全接入模块和交换机,无人机分析主机采用上述任意一种无人机自动巡检方法进行巡检。
40、本发明的技术效果在于:
41、针对复杂的障碍物环境(通道狭窄、障碍物密集)导致计算量暴增,现有的算法规划路径慢同时成功率不高的问题,本专利提出了快速稀疏bi-rrt(fast sparse bi-rrt,fsbi-rrt)算法,该算法中提出了局部稀疏节点策略、方向自学习策略和二分贪心剪枝优化策略用以进行算法加速,其中局部稀疏节点策略在路径搜索过程中实现对数据节点的核查,完成数据的降维;方向自学习策略,通过算法确定搜索方向,从而限制算法的随机搜索以避免无效计算;二分贪心剪枝优化策略进行最终路径的优化,加快优化点的搜索,提升算法效率。
42、本发明所提出的fsbi-rrt能够快速处理无人机巡检过程中的遇障问题,能以很快的速度规划最优路径,在提升效率的同时降低安全事故,保障变电站用力安全,较传统的算法更具有推广的意义。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199585.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表