一种硅单晶提拉伺服系统振动分析方法
- 国知局
- 2024-08-01 00:05:19
本技术涉及半导体集成电路硅单晶制备,尤其涉及一种硅单晶提拉伺服系统振动分析方法。
背景技术:
1、随着集成电路行业的不断发展,对硅单晶的品质和制备工艺提出了更高的要求。目前,直拉法是生产硅单晶的主要方法,其生长技术与工艺,控制策略与手段一直是半导体等相关行业高度关注和不断研究的热点。硅单晶的品质一般会受到多种因素的影响,例如硅单晶生长过程中的温度控制、提拉速度控制,搅拌和旋转速度控制,以及制备设备的精度和稳定性等。这些因素之间的相互作用使得直拉法制备硅单晶成为一项精密的工艺,需要精细的工艺控制和检测,其中,对提拉速度的控制是影响硅单晶的品质的关键环节之一。
2、由于提拉伺服系统长期在低速模式下进行工作,会受到非线性摩擦、力矩波动、光电编码器的精度,以及系统耦合力矩等因素的干扰,从而使提拉伺服系统出现低速爬行现象和无规则振动现象。其中,非线性摩擦干扰是提拉伺服系统产生低速爬行现象和无规则振动现象的主要原因,这严重影响了硅单晶的品质。为了克服提拉伺服系统中的非线性摩擦干扰带来的不利影响,提高硅单晶的品质,就需要建立一个带有非线性摩擦模型的提拉伺服系统,来模拟非线性摩擦干扰给提拉伺服系统带来的不利影响,然后再进一步地分析如何对该提拉伺服系统中的摩擦环节实施有效补偿。
3、目前,用于提拉伺服系统的摩擦模型主要包括:lugre摩擦模型、dahl摩擦模型,stribeck摩擦模型和greenwood-williamson摩擦模型等。这些摩擦模型存在如下问题:
4、第一,lugre摩擦模型可以描述摩擦力在不同阶段的切换,比较贴合实际摩擦现象,但lugre摩擦模型的摩擦参数多,难以辨识,在实际应用中受到限制;
5、第二,dahl摩擦模型是最简单的动态摩擦模型,dahl摩擦模型避免了在静态状况下,不同制备阶段中不能连续切换的问题,但无法描述低速模式时的摩擦现象;
6、第三,greenwood-williamson摩擦模型考虑了表面微观结构,但主要应用于描述弹性形变和塑性形变对摩擦的影响;
7、第四,虽然stribeck摩擦模型能够描述提拉伺服系统在不同速度和超低速下的摩擦特性,但该摩擦模型中的多个参数在当提拉伺服系统的运行环境变化时,需要针对性地进行辨识和分析。
8、因此,有必要提出一种方案以改善上述相关技术方案中存在的一个或者多个问题。
9、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本技术的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本技术实施例提供一种硅单晶提拉伺服系统振动分析方法,该方法包括以下步骤:
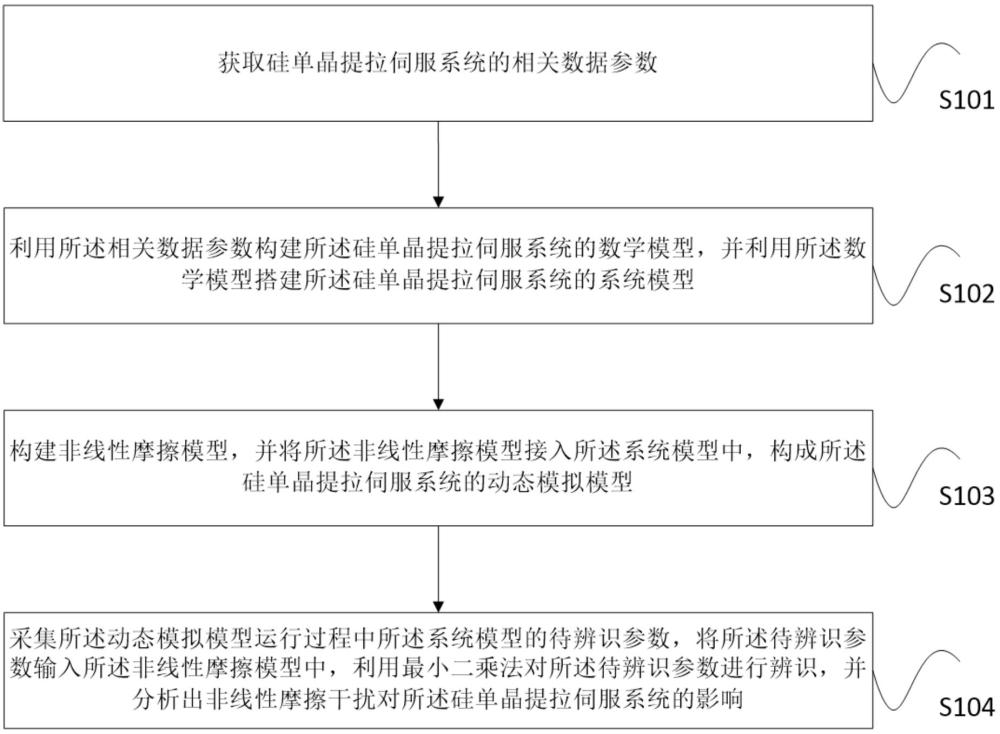
2、获取硅单晶提拉伺服系统的相关数据参数;
3、利用所述相关数据参数构建所述硅单晶提拉伺服系统的数学模型,并利用所述数学模型搭建所述硅单晶提拉伺服系统的系统模型;
4、构建非线性摩擦模型,并将所述非线性摩擦模型接入所述系统模型中,构成所述硅单晶提拉伺服系统的动态模拟模型;
5、采集所述动态模拟模型运行过程中所述系统模型的待辨识参数,将所述待辨识参数输入所述非线性摩擦模型中,利用最小二乘法对所述待辨识参数进行辨识,并分析出非线性摩擦干扰对所述硅单晶提拉伺服系统的影响。
6、本技术的一示例性实施例中,所述相关数据参数包括:电机的电磁转矩、电机的转矩系数、电机的转动惯量、电机的角速度、定子绕组的电压、定子绕组的电流、定子绕组的电阻、定子绕组的相电感、永磁体的磁势、转子的电角速度,转子的阻尼和摩擦扰动转矩。
7、本技术的一示例性实施例中,所述利用所述相关数据参数构建所述硅单晶提拉伺服系统的数学模型,并利用所述数学模型搭建所述硅单晶提拉伺服系统的系统模型的步骤包括:
8、利用所述相关数据参数构建出所述数学模型;
9、在零输入条件下,将所述数学模型进行拉氏变换处理,得到拉氏变换模型;
10、利用所述数学模型和所述拉氏变换模型,搭建出所述系统模型。
11、本技术的一示例性实施例中,所述数学模型的表达式为:
12、 (1)
13、其中,表示两相旋转坐标系下相的定子绕组的电压,表示定子绕组的电阻,表示两相旋转坐标系下相的定子绕组的相电感,表示两相旋转坐标系下相的定子绕组的电流,表示转子的电角速度,表示两相旋转坐标系下相的定子绕组的电流,表示两相旋转坐标系下相的定子绕组的电压,表示两相旋转坐标系下相的定子绕组的相电感,表示永磁体的磁势,表示电机的电磁转矩,表示电机的转动惯量,表示电机的角速度,表示转子的阻尼,表示摩擦扰动转矩。
14、本技术的一示例性实施例中,所述拉氏变换模型的表达式为:
15、<mstyle displaystyle="true" mathcolor="#000000"><mi>y</mi><mi>(</mi><mi>s</mi><mi>)</mi><mi>=</mi><mrow><mo>{</mo><mrow><mrow><mo>[</mo><mrow><msub><mi>k</mi><mi>c</mi></msub><mi>−</mi><msub><mi>t</mi><mn>1</mn></msub><mi>(</mi><msub><mi>l</mi><mi>q</mi></msub><mi>s</mi><mo>+</mo><msub><mi>r</mi><mi>s</mi></msub><mo>+</mo><mn>1</mn><mi>)</mi></mrow><mo>]</mo></mrow><mi>/</mi><msub><mi>k</mi><mi>c</mi></msub><mo>+</mo><mi>(</mi><mi>js</mi><mi>−</mi><msub><mi>t</mi><mn>1</mn></msub><mi>)(</mi><msub><mi>l</mi><mi>q</mi></msub><mi>s</mi><mo>+</mo><msub><mi>r</mi><mi>s</mi></msub><mo>+</mo><mn>1</mn><mi>)</mi></mrow><mo>}</mo></mrow><mi>⋅</mi><mi>r</mi><mi>(</mi><mi>s</mi><mi>)</mi></mstyle> (2)
16、其中,表示电机的实际转速,表示电机的转矩系数,表示拉氏变换处理中具有正实数部分的复变数,表示期望的速度。
17、本技术的一示例性实施例中,所述硅单晶提拉伺服系统的所述系统模型包括双闭环交流调速伺服系统,所述双闭环交流调速伺服系统为包括速度环和电流环的串级控制系统;
18、所述速度环为最外环的主回路,包括速度调节器;
19、所述电流环为最内环的副回路,包括电流调节器;
20、其中,所述速度调节器的输出作为所述电流调节器的输入;
21、所述电流环的表达式为:
22、 (3)
23、其中,表示域上的两相旋转坐标系下相的定子绕组的电压,表示域上的两相旋转坐标系下相的定子绕组的电流;
24、所述速度环的表达式与所述数学模型的表达式相同。
25、本技术的一示例性实施例中,所述非线性摩擦模型为stribeck摩擦模型,所述stribeck摩擦模型的表达式为:
26、 (4)
27、其中,表示摩擦力,表示动摩擦力,表示符号函数,表示提拉速度,表示最大静摩擦力,表示粘性摩擦系数,表示系统外力,表示stribeck速度。
28、本技术的一示例性实施例中,所述并将所述非线性摩擦模型接入所述系统模型中,构成所述硅单晶提拉伺服系统的动态模拟模型的步骤包括:
29、将所述非线性摩擦模型的输出与电机的电磁转矩的输出共同作为减速器的输入;
30、将电流环的输出作为所述非线性摩擦模型的所述系统外力的输入;
31、将所述减速器的输出作为所述非线性摩擦模型的实际速度的输入。
32、本技术的一示例性实施例中,所述采集所述动态模拟模型运行过程中所述系统模型的待辨识参数,将所述待辨识参数输入所述非线性摩擦模型中,利用最小二乘法对所述待辨识参数进行辨识,并分析出非线性摩擦干扰对所述硅单晶提拉伺服系统的影响的步骤包括:
33、所述待辨识参数包括所述系统模型的所述提拉速度和所述摩擦力;
34、构建利用所述最小二乘法进行所述辨识的目标函数;
35、将所述提拉速度和所述摩擦力代入所述目标函数中,辨识出所述动摩擦力、所述最大静摩擦力,所述粘性摩擦系数和所述stribeck速度;
36、通过辨识出的各项参数,分析所述stribeck摩擦模型中的各种情况和计算结果。
37、本技术的一示例性实施例中,所述目标函数的表达式为:
38、<mstyle displaystyle="true" mathcolor="#000000"><mi>e</mi><mi>=</mi><msup><mstyle displaystyle="true"><msubsup><mo>∑</mo><mrow><mi>i</mi><mi>=</mi><mn>1</mn></mrow><mi>n</mi></msubsup><mrow><mo>[</mo><mrow><mi>f</mi><mi>−</mi><mi>(</mi><msub><mi>f</mi><mi>c</mi></msub><mi>⋅</mi><mi>sign</mi><mi>(</mi><mi>v</mi><mi>)</mi><mo>+</mo><mi>(</mi><msub><mi>f</mi><mi>s</mi></msub><mi>−</mi><msub><mi>f</mi><mi>c</mi></msub><mi>)</mi><mi>⋅</mi><mi>(</mi><mn>1</mn><mi>/(</mi><msub><mi>v</mi><mi>i</mi></msub><mi>/</mi><msub><mi>v</mi><mi>s</mi></msub><msup><mi>)</mi><mn>2</mn></msup><mi>)</mi><mo>+</mo><msub><mi>f</mi><mi>v</mi></msub><mi>⋅</mi><mi>v</mi></mrow><mo>]</mo></mrow></mstyle><mn>2</mn></msup></mstyle> (5)
39、其中,表示目标函数,表示测量数据的数量,,表示第次测量的提拉速度。
40、有益效果:
41、本技术提供一种硅单晶提拉伺服系统振动分析方法,至少具有以下有益效果:
42、(1)本技术通过构建系统模型和非线性摩擦模型,能够模拟硅单晶提拉过程中由于非线性摩擦干扰引起的低速爬行现象和无规则振动现象;
43、(2)本技术通过将非线性摩擦模型接入系统模型中,构建出动态模拟模型,有利于对硅单晶提拉伺服系统进行进一步研究,来抑制硅单晶提拉过程中产生的低速爬行现象和无规则振动现象,提高硅单晶的成品的品质;
44、(3)同时,本技术提出的非线性摩擦模型和系统模型具有很高的可移植性,能够通过对非线性摩擦模型的参数和系统模型进行调节,来分析非线性摩擦对其他类似的伺服系统产生的干扰。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199602.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表