多电液伺服系统协调跟踪控制方法
- 国知局
- 2024-08-01 00:05:55
本发明属于控制方法领域,涉及一种多电液伺服系统协调跟踪控制方法。
背景技术:
1、基于pid控制电液伺服系统,对于电液伺服系统这种具有高非线性的系统,无法获得高精度控制性能。
2、作为近年来日渐成熟的控制理论,自适应控制逐渐被应用到电液位伺服系统的高精度跟踪控制研究中,常被用来处理电液伺服系统中出现的参数不确定性。采用反步法逐步设计虚拟控制律,并且使用自适应律来估计参数不确定性,从而降低了控制器的设计难度,保证了系统的瞬态性能和稳态跟踪精度。设计了复合型扩张状态观测器来抑制匹配扰动和不匹配扰动给系统带来的影响,使用自适应律估计参数不确定性,并且基于参数估计和干扰估计设计了控制器,进一步减小了参数不确定性和外界干扰对系统性能的影响,大大提高了系统的跟踪性能。自适应控制虽然可以用来处理参数不确定性,可是对于强干扰作用下的系统设计的控制器的性能却不理想。进一步考虑安全性能,优化性能设计要求,现有多电液伺服协调控制系统设计方法还不够完善。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种多电液伺服系统协调跟踪控制方法。
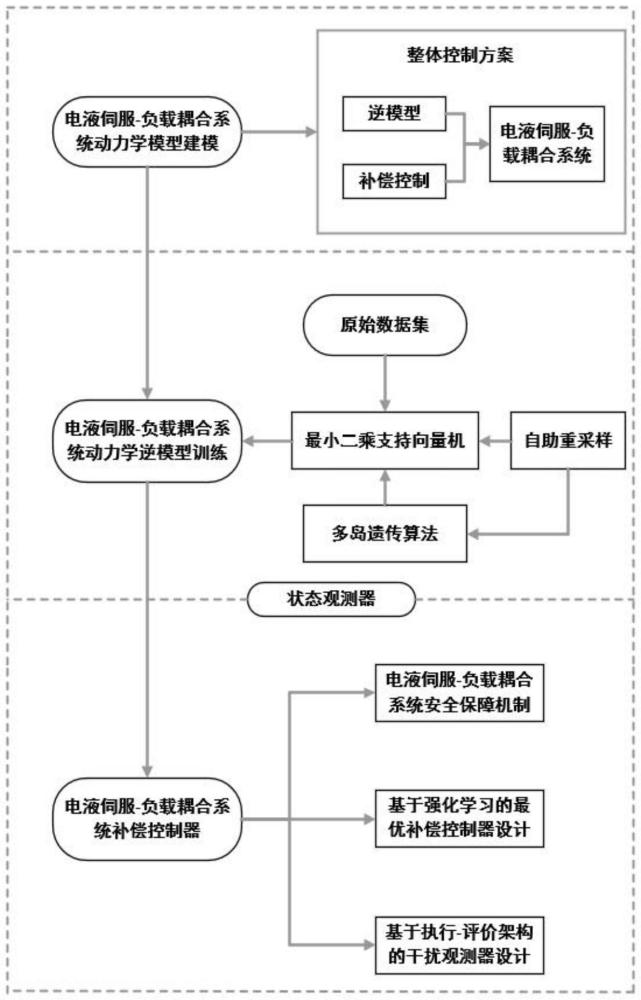
2、针对于现有技术对电液伺服系统中负载问题的忽视,本发明创新性地提出构建电液伺服-负载耦合系统动力学模型,将负载动量和液压缸压力作为系统状态变量。
3、针对于电液伺服系统高精度跟踪控制问题,本发明创新提出逆模型-补偿控制器跟踪控制方案,可实现对电液伺服-负载耦合系统的高精度跟踪控制。
4、针对于最小二乘支持向量机策略中惩罚因子和核函数宽度参数选择问题,本发明提出用多岛遗传算法对其进行优化。
5、针对于原始数据获取困难问题,本发明提出使用自助残差重采样方法生成多组伪数据集,不仅可以作为多岛遗传算法子岛数据,还可以在最小二乘支持向量机构建单电液伺服-负载耦合系统动力学逆模型中作为训练数据集。
6、针对于传统多电液伺服系统安全性问题,本发明提出安全性保障机制,提高电液伺服-负载耦合系统的安全性与可靠性。
7、针对于传统补偿控制器设计中的适应性缺乏问题和非确定性问题,提出基于强化学习设计补偿控制器。
8、为达到上述目的,本发明提供如下技术方案:
9、多电液伺服系统协调跟踪控制方法,该方法包括以下步骤:
10、s1:建立电液伺服-负载耦合系统动力学模型;
11、建立电液伺服系统的三个特性方程:
12、①伺服阀流量-压力特性方程:
13、
14、式中:ql为负载流量,cd为伺服阀节流孔流量系数,w为节流孔面积梯度,ps为系统供给压力,pl为负载压力,xv为阀芯位移,ρ为液压油密度;
15、②机械动力机构平衡方程:
16、
17、式中:ap为活塞有效面积,y为活塞位移,m为系统负载质量,k为负载弹簧长度,bc为粘性阻尼系数,fl为负载压力,l(t)为系统非线性如摩擦干扰;
18、③液压缸流量压力连续性方程:
19、
20、式中:ctl为总泄露系数,βe为流体体积弹性模量,ctlpl为总泄露流量,总压缩流量;
21、多电液伺服系统负载总动量为:
22、
23、根据三个特性方程以及多电液伺服系统负载总动量公式,令单个电液伺服-负载耦合系统状态变量为:
24、x(t)=[x1,x2,x3]t=[y(t),p(t),appl(t)]t (1-5)
25、联立电液伺服系统的三个特性方程与动量计算公式,则多电液伺服-负载耦合系统中单个电液伺服-负载耦合系统动力学模型如下:
26、
27、式中ksv为伺服阀放大系数,vt为液压动力机构总容积,sgn(·)为符号函数,为综合扰动,u1为逆模型输出控制电压,u2为补偿控制;将电液伺服负载耦合系统动力学模型简化为:
28、
29、式中,f为利普希兹连续且满足零初始条件即f(0)=0;
30、模型中含有不确定参数βe、bc、vt、ctl、ksv以及综合扰动q(t);
31、s2:基于多岛遗传算法与自助重采样方法优化最小二乘支持向量机ls-svm;
32、以ls-svm策略为基础构建电液伺服-负载耦合系统动力学逆模型;
33、采用多岛遗传算法优化ls-svm策略,平衡全局搜索和局部搜索的能力;
34、采用自助重采样方法生成多组伪数据集作为多岛遗传算法子群初始数据;
35、基于最小二乘支持向量机策略构建单电液伺服-负载耦合系统动力学逆模型;
36、支持向量机模型通过核函数将低维数据映射到高维特征空间,不同的核函数对应不同的映射方式;建立支持向量机模型选择高斯核函数,高斯核函数表达式如下:
37、
38、式中x为输入向量,xi为输出向量,σ为核函数宽度;
39、核函数的引入,使得回归决策函数能够处理非线性问题;经核变换,构造单电液伺服-负载耦合系统动力学逆模型判别函数如下:
40、
41、使样本x即电液伺服-负载耦合系统输出位移对应的电液伺服阀的控制输入电压y能用f(x)近似;式中ω=[ω1,ω2,…,ωl]t为权重系数向量,为非线性函数,将样本映射到高维空间,b∈r为偏置项;
42、为求解最优ω和b值,选择误差ζi的平方作为ls-svm优化过程中的损失函数,ls-svm优化问题如下:
43、
44、式中ζ=[ζ1,ζ2,…,ζl]为误差向量,c为惩罚因子,用于调节经验风险与模型复杂度之间的关系;
45、鉴于最小二乘支持向量机中惩罚因子c和核函数宽度参数σ的选择会影响ls-svm模型的泛用性和准确性,寻找一种算法对模型中的参数进行优化;引入多岛遗传算法对惩罚因子c和核函数宽度参数σ进行全局寻优,得到最优惩罚因子c和核函数宽度参数σ;
46、为求解上述约束优化函数式,建立拉格朗日函数如下:
47、
48、式中α=[α1,α2,…,αl]∈rl为拉格朗日乘子向量;
49、由卡罗需-库恩-塔克条件,上式优化为:
50、
51、由mercer’s条件,核函数化简得:
52、
53、使用最小二乘支持向量机策略对单液伺服-负载耦合系统逆模型的训练过程,即求解上方程的解,式中e为单位矩阵;
54、采用最小二乘的方法获得(b,α1,...,αl)t的估计,求解上式得ls-svm决策函数为:
55、
56、利用自助重采样方法与多岛遗传算法优化惩罚因子c和核函数宽度参数σ过程:
57、s211:根据试验得到的原始数据集d={(xi,yi)},i=1,2,3,…,n,(xi,yi)其中为液伺服-负载耦合系统对应的输入输出,即电液伺服阀的控制输入电压-液伺服-负载耦合系统输出位移,利用最小支持二乘向量机策略得到液伺服-负载耦合系统逆模型的初始回归模型,计算输出值之间的残差值
58、s212:将得到的残差矩阵中所得到的残差值随机打乱,然后与原始数据集d={(xi,yi)},i=123,…,n中的输出相加,从而生成新的数据集d*;
59、s213:将s212重复n'次,得到n'组全新的数据集将这n'组全新的数据集作为多岛遗传算法中子群数据集;
60、s214:将s212重复n次,得到n组全新的数据集将这n组全新的数据集最小二乘支持向量机构造多电液伺服-负载耦合系统中单个电液伺服-负载耦合系统动力学逆模型中的子群数据集;
61、多岛遗传算法miga通过反复恰当地使用遗传算法的算子和选择原则,使得种群对环境的适应性不断升高;多岛遗传算法的原始数据集即为由自助残差重采样方法得到的n'组伪数据集,利用多岛遗传算法寻找全局最优惩罚因子c和核函数宽度σ的流程如下:
62、s221:初始化n'个子种群,每个子种群都是一个独立的遗传算法种群,其原始数据通过自主残差重采样方法获得;
63、s222:判断各个子岛是否满足迁移条件,若不满足迁移条件则各个子岛独立进行遗传算法进化,若满足迁移条件,则对各子岛实行迁移策略;
64、s223:通过迁移形成新子岛,各新子岛继续进行岛内遗传算法进化和岛间迁移;
65、s224:重复s222和s223,直到达到预定的停止条件,达到最大迭代次数gen;
66、s225:结果输出:最优惩罚因子c和核函数宽度σ;
67、构建基于优化最小支持二乘向量机策略逆模型:
68、辨识过程具体步骤如下:
69、s231:利用原始数据,构建电液伺服-负载耦合系统动力学逆模型的初始模型;
70、s232:利用电液伺服-负载耦合系统动力学逆模型的初始模型,使用自助残差重采样方法,得到n'伪数据集;
71、s233:把n'组伪数据集作为多岛遗传算法各子岛初始训练数据,对各子岛进行岛内遗传算法进化和岛间迁移,得到最优惩罚因子c和核函数宽度参数σ;
72、s234:利用电液伺服-负载耦合系统动力学逆模型的初始模型,使用自助残差重采样方法,得到n伪数据集,;
73、s235:利用优化得到的最优惩罚因子c和核函数宽度参数σ,训练n伪数据集,得到多电液伺服系统中n个子电液伺服-负载耦合系统动力学逆模型;
74、电液伺服-负载耦合系统动力学逆模型评价指标:
75、平方绝对误差mae表示为:
76、
77、均方根误差rmse表示为:
78、
79、决定系数r2表示为:
80、
81、yi为模型输出,为实际测量输出,为实际测量输出平均值,模型评价标准用以评价参数(c,σ)对应的预测准确率;
82、电液伺服-负载耦合子系统动力学逆模型描述为:
83、
84、s3:设计电液伺服-负载耦合系统状态观测器
85、通过构建电液伺服-负载耦合系统动力学逆模型,得到单个电液伺服负载耦合系统逆模型控制输入u1,将单个电液伺服-负载耦合系统动力学模型表示如下:
86、
87、式中
88、假设1:简化模型中综合扰动qi(t)未知时变但是有界,存在未知正常数m1,m2使得qi(t)满足:
89、电液伺服-负载耦合系统状态观测器设计过程:
90、将电液伺服-负载耦合系统系统表示为:
91、
92、式中:c=(1 0 0);其中a为赫尔维兹矩阵,li表示观测器增益;
93、使用神经网络对电液伺服-负载耦合系统中未知且连续变量和进行逼近;
94、
95、
96、设计电液伺服-负载耦合系统状态观测器如下:
97、
98、s4:设计电液伺服-负载耦合系统安全性保障机制和基于强化学习最优补偿控制器
99、在电液伺服-负载耦合系统的控制过程中加入如下全状态约束条件,约束系统状态,即输出位移、负载动量和液压缸压力,在安全范围之内,保证电液伺服-负载耦合系统的安全性和可靠性;
100、
101、针对于多电液伺服-负载耦合系统的输出位移约束问题:
102、
103、设计代价函数如下,使多电液伺服-负载耦合系统跟踪误差约束在限定范围内,由跟踪误差定义推知在如下条件下,电液伺服系统实现输出位移约束:
104、
105、针对于多电液伺服-负载耦合系统负载动量约束条件:
106、
107、设计代价函数如下,使多电液伺服-负载耦合系统负载动量约束在限定范围内,实现对电液伺服-负载耦合系统负载动量的约束:
108、
109、针对于多电液伺服-负载耦合系统的液压缸压力约束条件:
110、
111、设计代价函数如公式(4-7),使多电液伺服-负载耦合系统中每一个电液伺服-负载耦合系统液压缸压力约束在限定范围内;
112、
113、代价函数实现对电液伺服-负载耦合系统的输出位置、负载动量和液压缸压力进行约束;
114、采用强化学习求解电液伺服-负载耦合系统跟踪控制过程中的最优补偿控制器:
115、误差定义:
116、
117、
118、
119、经逆模型变换后的单个电液伺服-负载耦合系统看作为三阶严格反馈系统,采用反步法求解最优控制器ui,2。
120、进一步,所述采用反步法求解最优控制器步骤如下:
121、第一步:
122、定义跟踪误差:
123、zi,1=yi-yd (4-11)
124、
125、定义价值函数:
126、
127、当为最优虚拟控制器时,最优价值函数为:
128、
129、建立hjb方程:
130、
131、由同时引入执行器评价网络,得到最优虚拟控制律
132、
133、由梯度下降法得神经网络系数更新方程为:
134、
135、第二步:
136、跟踪误差:
137、
138、
139、定义价值函数:
140、
141、当为最优虚拟控制器时,最优价值函数为:
142、
143、hjb方程为:
144、
145、由使用执行器-评价网络:
146、
147、得到最优虚拟控制律由梯度下降法得神经网络系数更新方程:
148、
149、利用所使用的执行器评价网络,定义干扰观测器为:
150、
151、其中ρi,2为正常数;
152、第三步:
153、跟踪误差:
154、
155、
156、定义价值函数:
157、
158、当ui*为最优虚拟控制器时,最优价值函数为:
159、
160、hjb方程为:
161、
162、由使用执行器-评价网络:
163、
164、得到最优虚拟控制律由梯度下降法得神经网络系数更新方程:
165、
166、利用所使用的执行器-评价网络,定义干扰观测器:
167、
168、其中ρi,3为正常数。
169、本发明的有益效果在于:
170、(1)将多电液伺服系统与其负载综合考虑,提出电液伺服-负载耦合系统,并建立其动力学模型,在此模型基础上进行控制,提高了电液伺服系统的工作效率和安全性。
171、(2)提出逆模型-补偿控制器控制策略,提高电液伺服-负载耦合系统工作效率的同时保证了控制的精确,同时使系统的安全性和可靠性大大提升。
172、(3)利用自助残差重采样方法生成伪数据集,降低了电液伺服-负载耦合系统动力学逆模型训练过程中对原始数据集的依赖性,同时为多岛遗传算法提供子岛数据集。
173、(4)基于多岛遗传算法与自助残差重采样方法优化最小二乘支持向量机,利用多岛遗传算法全局寻优的能力优化最小二乘支持向量机中的惩罚因子和核函数宽度,使得逆模型构建更加精确。
174、(5)提出电液伺服-负载耦合系统安全性保障机制,对强化学习设计补偿控制器过程中代价函数形式进行设计,使电液伺服-负载耦合系统的状态变量约束在限定范围之内。
175、(6)基于强化学习求解最优补偿控制器,将经过逆模型变换过的电液伺服-负载耦合系统简化为三阶严格反馈系统,利用反步法同时引入执行-评价框架求解最优控制器。
176、(7)针对于电液伺服-负载耦合系统的状态不可测问题,设计状态观测器对系统负载动量与液压缸压力进行有效观测。
177、(8)针对于电液伺服-负载耦合系统动力学模型中综合干扰以及经逆模型变换后的干扰,利用执行-评价构架设计干扰观测器,对系统干扰进行有效观测。
178、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199654.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。