一种适用于小行星巡视探测器的巡视控制方法及装置
- 国知局
- 2024-08-01 00:06:34
本发明属于小行星探测领域,特别涉及一种适用于小行星巡视探测器的巡视控制方法及装置。
背景技术:
1、部分小行星蕴藏了丰富的稀有金属资源,对于后续的深空探测具有较大的意义;同时小行星很可能保留了太阳系诞生之际的原初物质;因此探测小行星具有重大的科研价值。
2、小行星表面巡视探测可以直接对小行星表面物质进行采样检测,避免了采样返回耗时长,样品在返回途中变性的难题,是最理想的小行星表面探测方式。探测小行星过程中,探测器与地球的通讯存在高延迟、高能耗的问题,因此需要小行星探测器自行进行巡视控制。目前主流的巡视控制方法为利用人工神经网络,但这种方法存在计算量大、预训练环境复杂的问题。为更好的开展小行星表面巡视探测,有必要建立高效的小行星巡视探测器巡视控制方法。
技术实现思路
1、本发明的目的是为了克服现有技术的不足,提出一种适用于小行星巡视探测器的巡视控制方法及装置。本发明可以高效解算小行星探测器在开展小行星表面巡视探测过程中的控制轨迹,为小行星表面巡视探测提供有利保障。
2、本发明第一方面实施例提出一种适用于小行星巡视探测器的巡视控制方法,包括:
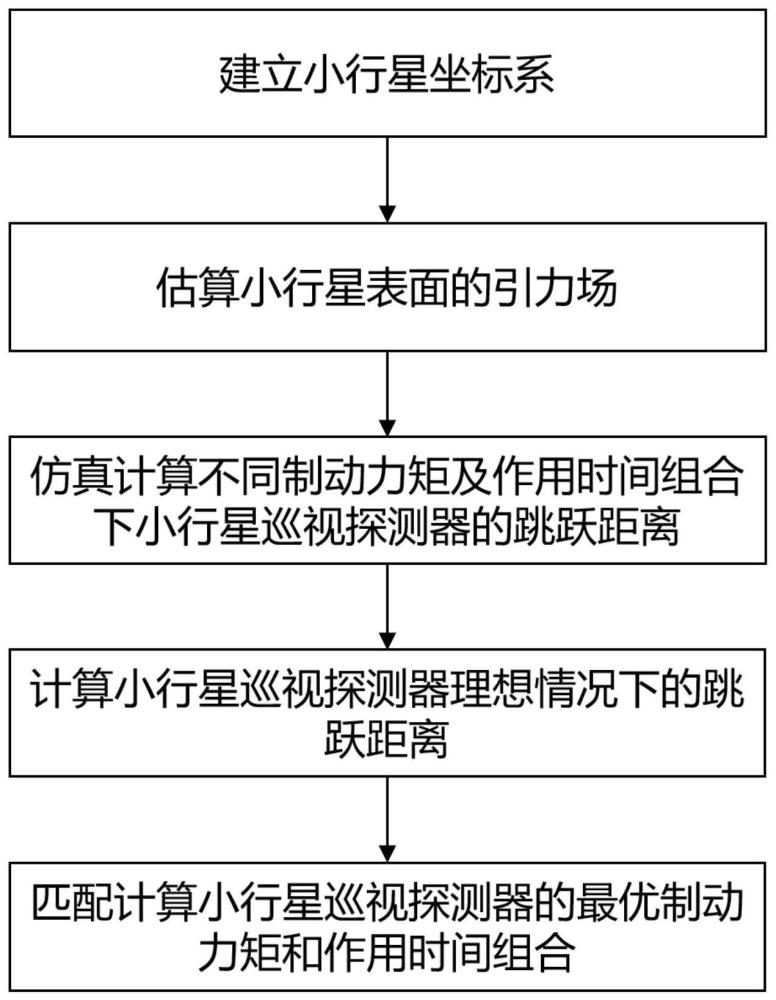
3、基于估算的小行星表面的引力场,仿真计算在不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离;
4、计算所述小行星巡视探测器理想情况下的跳跃距离;
5、通过将所述不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离与所述理想情况下的跳跃距离进行匹配,从所述不同制动力矩及作用时间组合中选取最优组合作为所述小行星巡视探测器的控制输入。
6、在本发明的一个具体实施例中,所述小行星表面的引力场的估算模型表达式如下:
7、
8、其中,为估算的小行星表面引力场大小;n表示小行星表面模型的采样点数量;ri表示第i个采样点的位置矢量,gs(ri)是ri处的小行星引力场矢量,i=1,2,…,n。
9、在本发明的一个具体实施例中,所述仿真计算在不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离采用abaqus仿真软件或者预设的地面仿真试验平台中的任一种。
10、在本发明的一个具体实施例中,所述计算所述小行星巡视探测器理想情况下的跳跃距离,表达式如下:
11、δη=(η-ηd)(e-k-1)
12、其中,δη表示小行星巡视探测器理想情况下的跳跃距离,η表示小行星巡视探测器的当前位置矢量,ηd表示小行星巡视探测器的目标位置矢量,e表示自然对数底数,k是反馈控制系数。
13、在本发明的一个具体实施例中,所述将所述不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离与所述理想情况下的跳跃距离进行匹配采用最近邻方法,从所有制动力矩及作用时间组合下的小行星巡视探测器的跳跃距离中选取出与理想情况下的跳跃距离最接近的跳跃距离,该最接近的跳跃距离对应的制动力矩及作用时间组合即为小行星巡视探测器的最优制动力矩和作用时间组合。
14、本发明第二方面实施例提出一种适用于小行星巡视探测器的巡视控制装置,包括:
15、仿真模块,用于基于估算的小行星表面的引力场,仿真计算在不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离;
16、理想距离计算模块,用于计算所述小行星巡视探测器理想情况下的跳跃距离;
17、匹配模块,用于通过将所述不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离与所述理想情况下的跳跃距离进行匹配,从所述不同制动力矩及作用时间组合中选取最优组合作为所述小行星巡视探测器的控制输入。
18、在本发明的一个具体实施例中,所述小行星表面的引力场的估算模型表达式如下:
19、
20、其中,为估算的小行星表面引力场大小;n表示小行星表面模型的采样点数量;ri表示第i个采样点的位置矢量,gs(ri)是ri处的小行星引力场矢量,i=1,2,…,n。
21、在本发明的一个具体实施例中,所述仿真计算在不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离采用abaqus仿真软件或者预设的地面仿真试验平台中的任一种。
22、在本发明的一个具体实施例中,所述计算所述小行星巡视探测器理想情况下的跳跃距离,表达式如下:
23、δη=(η-ηd)(e-k-1)
24、其中,δη表示小行星巡视探测器理想情况下的跳跃距离,η表示小行星巡视探测器的当前位置矢量,ηd表示小行星巡视探测器的目标位置矢量,e表示自然对数底数,k是反馈控制系数。
25、在本发明的一个具体实施例中,所述将所述不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离与所述理想情况下的跳跃距离进行匹配采用最近邻方法,从所有制动力矩及作用时间组合下的小行星巡视探测器的跳跃距离中选取出与理想情况下的跳跃距离最接近的跳跃距离,该最接近的跳跃距离对应的制动力矩及作用时间组合即为小行星巡视探测器的最优制动力矩和作用时间组合。
26、本发明第三方面实施例提出一种电子设备,包括:
27、至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;
28、其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被设置为用于执行上述一种适用于小行星巡视探测器的巡视控制方法。
29、本发明第四方面实施例提出一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行上述一种适用于小行星巡视探测器的巡视控制方法。
30、本发明的特点及有益效果在于:
31、在小行星巡视探测器开展小行星巡视探测的过程中,小行星需要自主开展巡视轨迹控制。本发明首先提出在地面预先计算不同制动力矩下巡视探测器的跳跃距离与方向,为巡视探测器在小行星表面的跳跃效果提供参考基准。其次,本发明提出使用简单的反馈控制,结合最近邻方法,匹配估计巡视时需要的制动力矩,计算小行星表面巡视时的控制量,保证了巡视探测控制量的高效解算。本发明未来可以用于小行星着陆探测、小行星撞击防御等深空探测任务,为小行星表面巡视探测提供有利保障。
技术特征:1.一种适用于小行星巡视探测器的巡视控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述小行星表面的引力场的估算模型表达式如下:
3.根据权利要求1所述的方法,其特征在于,所述仿真计算在不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离采用abaqus仿真软件或者预设的地面仿真试验平台中的任一种。
4.根据权利要求1所述的方法,其特征在于,所述计算所述小行星巡视探测器理想情况下的跳跃距离,表达式如下:
5.根据权利要求1所述的方法,其特征在于,所述将所述不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离与所述理想情况下的跳跃距离进行匹配采用最近邻方法,从所有制动力矩及作用时间组合下的小行星巡视探测器的跳跃距离中选取出与理想情况下的跳跃距离最接近的跳跃距离,该最接近的跳跃距离对应的制动力矩及作用时间组合即为小行星巡视探测器的最优制动力矩和作用时间组合。
6.一种适用于小行星巡视探测器的巡视控制装置,其特征在于,包括:
7.根据权利要求6所述的装置,其特征在于,所述小行星表面的引力场的估算模型表达式如下:
8.根据权利要求6所述的装置,其特征在于,所述仿真计算在不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离采用abaqus仿真软件或者预设的地面仿真试验平台中的任一种。
9.根据权利要求6所述的装置,其特征在于,所述计算所述小行星巡视探测器理想情况下的跳跃距离,表达式如下:
10.根据权利要求6所述的装置,其特征在于,所述将所述不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离与所述理想情况下的跳跃距离进行匹配采用最近邻方法,从所有制动力矩及作用时间组合下的小行星巡视探测器的跳跃距离中选取出与理想情况下的跳跃距离最接近的跳跃距离,该最接近的跳跃距离对应的制动力矩及作用时间组合即为小行星巡视探测器的最优制动力矩和作用时间组合。
技术总结本发明提出一种适用于小行星巡视探测器的巡视控制方法及装置,属于小行星探测领域。其中,所述方法包括:基于估算的小行星表面的引力场,仿真计算在不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离;计算所述小行星巡视探测器理想情况下的跳跃距离;通过将所述不同制动力矩及作用时间组合下小行星巡视探测器的跳跃距离与所述理想情况下的跳跃距离进行匹配,从所述不同制动力矩及作用时间组合中选取最优组合作为所述小行星巡视探测器的控制输入。本发明可以高效解算小行星探测器在开展小行星表面巡视探测过程中的控制轨迹,为小行星表面巡视探测提供有利保障。技术研发人员:严炜锋,宝音贺西受保护的技术使用者:清华大学技术研发日:技术公布日:2024/7/9本文地址:https://www.jishuxx.com/zhuanli/20240730/199712.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表