一种轮式机器人路况识别方法与速度自适应匹配系统
- 国知局
- 2024-08-01 00:08:48
本发明涉及一种轮式机器人路况识别方法与速度自适应匹配系统,属于轮式机器人控制。
背景技术:
1、本发明所提出的轮式机器人是一种能够自主导航、运输物品的无人驾驶车辆。轮式机器人广泛应用于工业生产和物流领域,它通过内置的导航系统和传感器来感知周围环境,并根据预设的路径或任务进行自动导航和操作。随着轮式机器人的快速发展,其应用领域非常广泛。在制造业中,它们可用于自动化生产线上的物料搬运、零部件供应等;在物流领域,它们可以实现自动化仓储管理、货物运输等;在医疗行业,它们被用于实现药品和样本的自动分发和运输等。
2、轮式机器人的技术发展也在不断进步。随着人工智能、机器视觉和无线通信等技术的不断革新,实现轮式机器人在多种路况环境下的应用也应运而生。另外,现有的轮式机器人的导航技术较为繁琐,需要提前布置好环境和规划路线,难以做到在室内室外以及更多种路况环境下的使用,而且单一的速度运行方案在不同路况下并不能一概而用。因此,研发一种基于先进的图像识别技术和轮式机器人控制系统的智能速度匹配方案具有重要的意义。
技术实现思路
1、针对现有技术的不足,本发明提供一种轮式机器人路况识别方法与速度自适应匹配系统,旨在提升轮式机器人在运输货物过程中的安全性和稳定性,提供更稳定、更高效的运动方案。
2、本发明的技术方案如下:
3、一种轮式机器人路况识别与速度自适应匹配的系统,包括图像信息采集模块、图像信息处理模块、中央控制系统、通信模块、速度匹配模块、控制器模块、调速控制模块;
4、图像信息采集模块:该模块包括摄像头,用于采集轮式机器人在行驶过程中的实时图像,同时摄像头会不断采集周围环境信息,图像信息采集模块将拍摄的实时图像发送给图像信息处理模块进行后续处理;图像信息采集模块将周围环境信息通过通信模块传至中央控制系统,从而实时更新地图信息,避免碰撞事故的发生;
5、图像信息处理模块:该模块通过使用opencv库对采集到的轮式机器人的行驶实时图像进行处理;首先,图像信息处理模块通过自定义的udp协议将采集到的实时图像数据进行处理,并将其发送到改进-yolov8算法中进行检测、识别和分类;改进-yolov8算法利用先进的目标识别分类技术,能够更快速、准确的识别路面信息,并将当前路面分类为常态(普通路面)、上坡、下坡、高粉尘、低亮度、有障碍,并将分类结果传至中央控制系统进行接受并进一步处理;
6、优选的,在路面信息采集中,使用udp协议可以实现将摄像头拍摄到的视频流数据实时传输到指定的图像信息处理模块,以便进行路面类型识别分类,具体步骤如下:
7、首先设置发送端,即摄像头,使用摄像头获取实时视频流数据,具体可利用opencv库来实现;创建udp发送端,通过编写一个程序,在摄像头端创建一个udp-socket,将摄像头捕获到的视频流数据通过udp协议发送至预先设定的目标ip地址和端口;其次设置接收端,即图像信息处理模块,创建udp接收端,在图像信息处理模块端编写一个udp接收端程序,创建一个udp-socket并绑定到指定端口,接收来自发送端发送的路面视频流数据,对接收到的视频流数据进行解码、显示,以便于接下来进一步的处理。
8、在实际具体应用中,需要测试网络延迟对数据传输的影响,以保证数据传输的实时性;同时要考虑对视频流数据进行压缩以减少带宽占用,以及考虑对传输的数据进行加密以确保安全性。
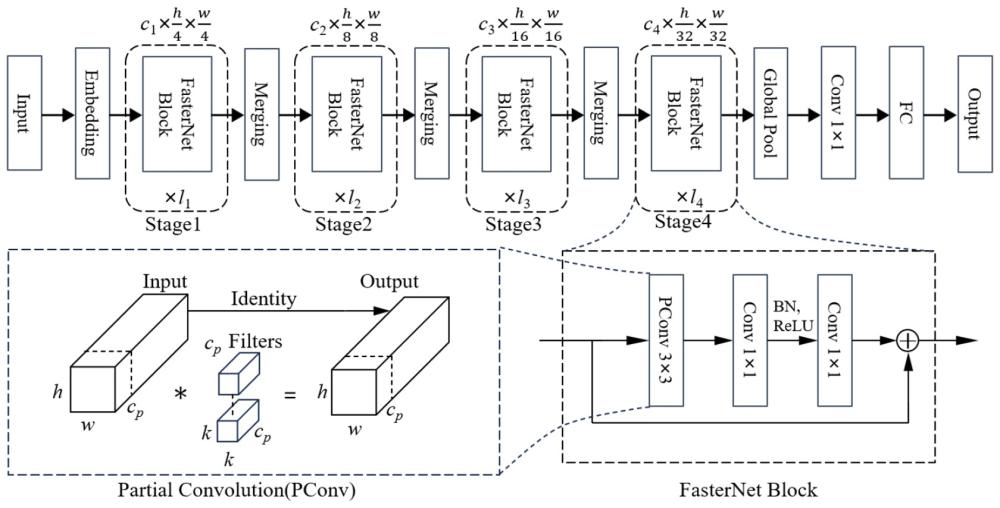
9、进一步优选的,改进-yolov8算法使用fasternet替换yolov8的主干网络,改进的yolov8网络结构包括输入、嵌入层、四个分层阶段、全局平均池化层、conv 1×1层、全连接层、输出、head部分,一起用于特征分类。四个分层阶段中每个阶段都有至少一个fasternet块堆栈,相邻两个阶段之间设有合并层,后面两个阶段中的fasternet块的数量多于前面两个阶段;每个阶段之前都有一个嵌入层或一个合并层,用于空间下采样和通道数扩展。最后两个阶段中的块消耗较少的内存访问,并且往往具有更高的flops,放置更多fasternet块,并相应地将更多计算分配给最后两个阶段。
10、嵌入层为步长为4的常规conv 4×4,合并层为步长为2的常规conv 2×2;
11、每个fasternet块都包括一个pconv层,pconv层后面是两个pwconv(conv 1×1)层;它们一起显示为反转的残余块,其中中间层即两个pwconv(conv 1×1)层中的第一个,中间层具有扩展的通道数量,并且放置快捷连接以重用输入特征;除上述运算符之外,归一化和激活层对于高性能神经网络也不可或缺,只将它们放在每个中间conv之后,以保持特征多样性并实现更低的延迟。此外,使用批量归一化(bn),bn的好处是,它可以合并到相邻的conv层中,以实现更快的推理,同时与其他层一样有效。至于激活层,选择relu 用于较大的fasternet变体,同时考虑运行时间和有效性。在两个pwconv(conv 1×1)层之间设置归一化bn和激活层relu;
12、改进-yolov8算法中使用了一个新颖的局部卷积pconv,削减冗余计算和内存访问,fasternet块中的pconv层只是在一部分输入通道上应用常规conv进行空间特征提取,其余通道保持不变,使得更高效地提取空间特征。对于连续或常规的内存访问,我们使用第一个或最后一个连续的cp通道作为整个特征图的代表进行计算;不失一般性地说,我们可认定输入和输出特征图具有相同数量的通道;因此,pconv的flops仅为:
13、(1)
14、在典型的部分比率r = cp/c = 1/4的情况下,pconv的flops仅为常规conv的1/16;此外,pconv具有更小的内存访问量,即,
15、(2)
16、它只是r = 1/4时普通conv的1/4;
17、其中,h为特征图的高度,w为特征图的宽度,k为卷积核的大小,cp为局部卷积作用的通道数,c为常规卷积作用的通道数。
18、进一步优选的,为充分有效地利用来自所有通道的信息,进一步将逐点卷积即pwconv(conv 1×1)层附加到pconv层中,二者组合起来形成t形conv,与均匀处理补丁的常规conv相比,它更专注于中心位置。
19、yolov8可以通过预测输入图像的类别标签来进行图像分类任务,当实时图像信息数据发送到改进后的yolov8算法中后,视频流数据会被自动分割成一帧一帧的图片,改进-yolov8算法会对输入的图片进行预处理,包括图像尺寸的调整、归一化等操作,以适应模型的输入要求,在经过yolov8网络结构处理后,改进-yolov8算法会通过卷积网络对图像进行特征提取,进一步将图像发送到yolov8算法的head部分进行识别分类,head部分包含一个classify模块,确定图像中路面的类别,最后将添加路面的类别标签处理后的图像输出,通过通信模块发送至中央控制系统。
20、通信模块,该模块用于各个模块之间或者模块与中央控制系统之间的信息信号传递;具体的:用于接收来自图像信息采集模块的实时周围环境信息,并将周围环境信息发送到中央控制系统;用于接收来自图像信息处理模块的路面分类结果,并将结果发送到中央控制系统,经确认后该结果发送至速度匹配模块;用于接收数据获取模块采集的数据信息,并将该数据信息发送至中央控制系统。
21、速度匹配模块:该模块根据经确认后的图像信息处理模块的检测分类结果和预设的各类路况速度匹配方案,进一步生成相应的控制指令并将指令传至控制器模块,通过综合考虑分类识别得到的路况和中央控制系统做出的决策,速度匹配模块可及时生成准确可靠的控制指令。
22、控制器模块:该模块可接受速度匹配模块所生成的控制指令,通过控制器对轮式机器人的调速控制模块进行控制;
23、调速控制模块:用于接收控制器模块的电机控制信号,可将当前轮式机器人速度、位置状态发送至中央控制系统,并控制电机转速,进而驱动车轮或马达来实现前进、后退、转弯、加速、减速等运动操作,实现轮式机器人相应的速度匹配方案。
24、优选的,所述调速控制模块,内部包含数据获取模块、转向控制模块和电机模块;
25、所述的数据获取模块包含距离检测模块和速度获取模块;
26、距离检测模块包含激光测距传感器,用于当轮式机器人前方出现障碍物使得机器人需要紧急避障时,通过发射激光束并测量反射回来的时间来确定轮式机器人和障碍物之间的距离,并将距离数据通过通信模块实时发送至中央控制系统;
27、速度获取模块包含速度传感器,用于实时获取轮式机器人当前的速度、加速度数据信息,同时将本身的速度数据状态通过通信模块反馈给中央控制系统;
28、所述的转向控制模块,用于在机器人接收到转向的控制信号后,自动控制机器人的电机模块,通过控制电机转速进而实现机器人转向;
29、所述的电机模块,用于接收电机控制信号并控制电机转速,进而驱动车轮或马达来实现前进、后退、转弯、加速、减速等运动操作,进一步实现轮式机器人相应的速度匹配方案。
30、进一步优选的,所述转向控制模块包括左转和右转两个模块;
31、所述的左转模块,用于需要避障且障碍物位于机器人右前方时,控制电机模块,通过控制电机转速进而实现轮式机器人向左转向;
32、所述的右转模块,用于需要避障且障碍物位于机器人左前方时,控制电机模块,通过控制电机转速进而实现轮式机器人向右转向。
33、优选的,所述轮式机器人路况识别与速度自适应匹配的系统还包括急停控制模块,急停控制模块分别与中央控制系统和电机模块连接,急停控制模块用于当轮式机器人控制系统出现故障或发生紧急情况要停止机器人进行调整、修复或维护时,由中央控制系统的操作人员通过按钮发出指令,由此模块接收停车信号并传递给电机模块,使电机停止工作实现急停的目的。
34、优选的,所述轮式机器人路况识别与速度自适应匹配的系统中,机器人前端设置摄像头,摄像头外侧设有摄像头外罩,机器人前方还设有补光灯,摄像头外罩外侧上设有至少一套吹气装置,吹气装置包括相互连接的气泵、气管、喷头,气泵与控制器模块连接。
35、一种轮式机器人路况识别与速度自适应匹配的方法,包括步骤如下:
36、由摄像头采集轮式机器人在行驶过程中的实时图像,同时摄像头会不断采集周围环境信息,图像信息采集模块将拍摄的实时图像发送给图像信息处理模块,将周围环境信息通过通信模块传至中央控制系统;
37、图像信息处理模块使用opencv库通过自定义的udp协议将采集到的实时图像数据进行处理,并将其发送到改进-yolov8算法中进行检测、识别和分类,改进-yolov8算法将当前路面分类为常态(普通路面)、上坡、下坡、高粉尘、低亮度、有障碍,并将分类结果传至中央控制系统;
38、中央控制系统确认分类结果,并将该结果发送至速度匹配模块,速度匹配模块根据经确认后的图像信息处理模块的检测分类结果和预设的各类路况速度方案,进一步生成相应的控制指令并将指令传至控制器模块;
39、控制器模块接受速度匹配模块所生成的控制指令,通过控制器对轮式机器人的调速控制模块进行控制;
40、调速控制模块接收控制器模块的电机控制信号,可将当前轮式机器人速度、位置状态发送至中央控制系统,并控制电机转速,进而驱动车轮或马达来实现前进、后退、转弯、加速、减速等运动操作,实现轮式机器人相应的速度匹配方案。
41、优选的,速度匹配方案包括如下:
42、当图像信息处理模块将当前轮式机器人的行驶环境的实时图像检测完成后,分类结果若为常态路面,即室内或室外路况良好(非上下坡、高粉尘、低亮度、有障碍)的平路面,则生成执行速度方案v1的控制指令;
43、当图像信息处理模块将当前轮式机器人的行驶环境的实时图像检测完成后,分类结果若为下坡路面,即室外路况良好的下坡路面,则生成执行速度方案v2的控制指令;
44、当图像信息处理模块将当前轮式机器人的行驶环境的实时图像检测完成后,分类结果若为上坡路面,即室外路况良好的上坡路面,则生成执行速度方案v3的控制指令;
45、当图像信息处理模块将当前轮式机器人的行驶环境的实时图像检测完成后,分类结果若为高粉尘路面(粉尘的浓度为10毫克/立方米及以上即为高粉尘路面),则通过中央控制系统向轮式机器人的控制器模块发出指令,打开机器人摄像头外罩上的气泵,通过气管将气泵吹出的气体输送到喷头,向摄像头前方吹出风幕,对摄像镜头进行保护,避免摄像镜头沾染粉尘,同时速度匹配模块生成执行速度方案v4的控制指令;
46、当图像信息处理模块将当前轮式机器人的行驶环境的实时图像检测完成后,分类结果若为低亮度路面(环境亮度小于50lux即为低亮度),则通过中央控制系统向机器人的控制器模块发出指令,打开摄像头附近的补光灯,对摄像头所捕捉的拍摄区域进行补光,同时生成执行速度方案v5的控制指令;
47、当图像信息处理模块将当前轮式机器人的行驶环境的实时图像检测完成后,分类结果若为有障碍路面,则需判断障碍物位于机器人左前方或右前方,进一步将控制信号发送给调速控制模块中的转向控制模块,执行轮式机器人的左转或右转,同时生成执行速度方案v6的控制指令。
48、上述提及的速度方案v1-v6均可通过大量实验得出在该路面状况下最合适的具体轮式机器人车速。
49、本发明的有益效果在于:
50、本发明的基于改进-yolov8的轮式机器人路径识别匹配速度系统将先进的图像处理技术yolov8改进后结合到轮式机器人的导航系统上,为轮式机器人的导航方式提供了一种新的模式;同时对检测出的不同路况进行不同的速度方案的匹配,实现了轮式机器人在不同路况上的差速行驶,减少了在运输过程中轮式机器人受路况影响使得货物掉落的概率,解决了现有系统方案不具备对路径进行识别和规划匹配速度,因在不同路况使用同一速度导致货物掉落或机器人侧翻等影响轮式机器人运输效率的问题,而且该系统有效提升了轮式机器人运输货物的安全性和稳定性,对于未来推动轮式机器人更加智能化的发展具有重要意义。
本文地址:https://www.jishuxx.com/zhuanli/20240730/199809.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表