一种旋转导向钻井工具平台的保概率界容错跟踪控制方法
- 国知局
- 2024-08-01 00:14:13
本发明属于容错控制领域,具体涉及一种旋转导向钻井工具平台的保概率界容错跟踪控制方法。
背景技术:
1、旋转导向钻井工具平台是油气开采系统的核心部件,长期运行在高温高压的井下恶劣环境中。平台运行时,由于泥浆发电机供压不稳、永磁同步电机绕组故障、驱动电路组件故障等原因,极易发生执行器故障。在发生故障后,控制目标要求系统状态能够以尽量大的概率运行在指定的界限内,从而使平台的运行性能得到有效保证。
2、针对含有随机干扰信号的旋转导向钻井工具平台,现有技术包括容错镇定控制方法、保证系统状态期望有界性能的方法和传统的基于一阶状态方程的方法。而现有的容错镇定控制方法不能对参考信号进行跟踪,应用范围有限;现有的保证系统状态期望有界性能的方法无法保证状态以指定的概率收敛到指定的界内,安全性极低;传统的基于一阶状态方程的方法中使用了控制律,而控制律设计方法不够便利。
技术实现思路
1、针对含有随机干扰信号的旋转导向钻井工具平台,本发明提出了一种旋转导向钻井工具平台的保概率界容错跟踪控制方法,基于随机高阶全驱系统模型开发了一种新的自适应容错跟踪控制律,可以在发生执行器部分失效故障和偏置故障时实现系统对参考信号的跟踪,并且保证状态以指定的概率收敛到指定的界内,具有良好的容错能力。
2、本发明的技术方案如下:
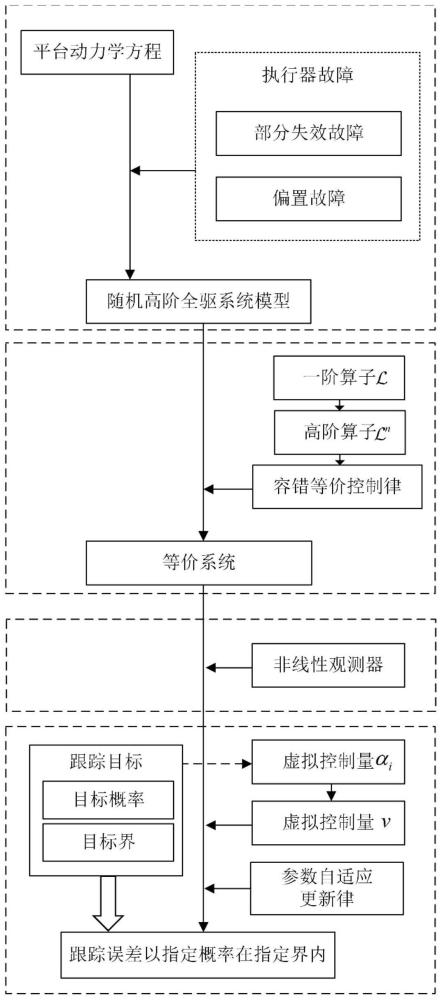
3、一种旋转导向钻井工具平台的保概率界容错跟踪控制方法,包括如下步骤:
4、步骤1、获取具有执行器故障的旋转导向钻井工具平台的随机高阶全驱系统模型;
5、步骤2、设计基于高阶算子的执行器容错的等价控制律,构建等价系统;
6、步骤3、设计非线性观测器,获得观测器引入的过程误差界限;
7、步骤4、逐步设计虚拟控制量,设计参数自适应更新律,实现跟踪误差以指定概率在指定界内。
8、进一步地,所述步骤1的具体过程如下:
9、步骤1.1、建立由永磁同步电机驱动的平台动力学方程,如下:
10、
11、其中,iq是q轴电流,是iq的一阶导数;θ是工具面角;是θ的一阶导数,表示工具面角的角速度;是θ的二阶导数;rs是定子绕组阻抗;lq是q轴定子绕组电感;np是电机极对数;φa是永磁体磁通;j是总惯量;b是阻尼系数;uq是q轴电压;ζ是随机干扰;工具面角的角速度的测量值为
12、步骤1.2、通过直接测量或辨识方法,获取平台各参数rs、lq、np、φa、j、b;
13、步骤1.3、将随机扰动建模为概率空间中的一个标准布朗运动,其中ω是采样空间,是采样空间ω上的一个σ域,是上的一个概率测度;
14、步骤1.4、定义高阶积分算子,如下:
15、
16、其中,为定义的高阶积分算子,n为算子的阶数,n为大于1的整数;t、ti均为被积时间元,i=1,…,n;i为序号表示;f(·)是动态函数;
17、步骤1.5、根据系统的动力学方程,将步骤1.1中平台动力学方程公式(1)对应的物理系统转换为如式(3)的高阶积分方程形式:
18、
19、其中,z(t)为r维的系统状态变量;z(t0)为系统状态变量在初始时刻的值;g为输入通道增益;u(t)为故障影响下的执行器输入;h为干扰通道增益,为lebesgue积分;积分;fi是第i阶积分下的系统非线性动态函数;此时有
20、步骤1.6、约定式(3)写为如式(4)的微分形式:
21、
22、步骤1.7、将执行器故障建模为:
23、u=(ir×r-η(t))u0+ζ(t) (5);
24、其中,ir×r为r维的单位矩阵;η(t)=diag{ηi(t)},i=1,2,...,r是失效故障系数,失效故障系数是未知的且随时间变化的,i为序号表示,ηi(t)为失效故障系数的第i个分量,diag为将向量作为对角线构造为矩阵的转换;是偏置故障幅值,偏置故障幅值是未知的且随时间变化的,ζ1,ζ2,...,ζr分别为偏置故障的第1,2,…,r个分量,r个分量对应r维;t为转置符号;u0是控制器发出的控制命令信号,即q轴电压uq;
25、步骤1.8、验证步骤1.7中的执行器故障满足式(6)~式(10)的条件:
26、
27、
28、
29、
30、其中,ζi(t)为偏置故障的第i个分量;和分别是η(t)和ζ(t)关于时间的导数;均为常数,分别代表失效故障系数的界、失效故障系数的时间导数的界、偏置故障幅值的界和偏置故障幅值的时间导数的界。
31、进一步地,所述步骤2的具体过程如下:
32、步骤2.1、对于任意满足式(10)的随机变量x与二次可微函数v,有式(11)的算子;
33、
34、
35、其中,x(t)为t时刻下随机变量x的值;x(0)为初始时刻下随机变量x的值;x(s)为s时刻下随机变量x的值;b表示漂移项;s表示被积时间元;σ表示扩散项;ωs是一个标准的布朗运动;是新定义的算子;tr{·}表示矩阵的迹;
36、步骤2.2、设计如式(12)的高阶算子,并约定为0阶算子;f为被操作函数;
37、
38、其中,表示一阶算子;表示n阶算子;表示n-1阶算子;
39、步骤2.3、设计如式(13)所示的容错等价控制律:
40、
41、其中,u0表示最终控制量,即控制器发出的控制命令信号;ua表示中间控制量;u·表示辅助控制量;v表示最终虚拟控制量;为的估计值;表示失效故障系数η(t)的补偿矩阵的估计值;表示偏置故障幅值ζ的估计值;是偏置故障的方向指示信号;⊙表示hadamard积;g-1(y)为输入通道增益的逆;为一组控制增益参数,且满足为n-i阶算子;
42、步骤2.4、将表示容错等价控制律的式(13)代入式(5),获得如式(14)的等价系统:
43、
44、其中,为n-1阶积分算子;表示补偿矩阵的估计误差;是由于观测器误差引入的过程误差。
45、进一步地,所述步骤3的具体过程如下:
46、步骤3.1、引入中间变量如下:
47、
48、其中,为一组中间变量;记中间变量
49、
50、步骤3.2、对于上述各个中间变量,设计非线性状态观测器如下:
51、
52、其中,为的估计值;为的导数,i=1,...,n;
53、步骤3.3、令的估计值为:
54、
55、其中,为的估计值,表示算子作用在z上;j为求和符号的计数标记;为的估计值,表示i-j阶算子。
56、进一步地,所述步骤4的具体过程如下:
57、步骤4.1、记y的目标跟踪信号为yr,引入跟踪误差为ξ1=y-yr;
58、步骤4.2、引入一系列虚拟控制量αi,i=1,2,...,n-1和一系列跟踪误差ξi,i=2,...,n,关系为:
59、
60、步骤4.3、设计第1个虚拟控制量α1为:
61、
62、其中是目标跟踪信号yr关于时间的一阶导数;
63、步骤4.4、设计第2个到第n个的一系列虚拟控制量αi,i=2,...,n为:
64、
65、其中,κi为一常数满足κi>1且κi,i=2,...,n;是目标跟踪信号yr关于时间的i阶导数;为第i个总迭代变量,计算公式如下;
66、
67、
68、其中,l为求和符号的计数标记;为的转置操作,为中间变量的估计值;为中的第j个扩散迭代分量;
69、步骤4.5、设计最终虚拟控制量v=αn;
70、步骤4.6、规定函数其中是自变量,∈是一个修饰常数;
71、步骤4.7、设计参数自适应更新律,如下:
72、
73、其中,为的导数;偏置故障的方向指示信号κk为满足的常数,为的导数;κζ为满足κζ>1的常数;
74、步骤4.8、确定控制目标为:使控制误差的绝对值|y-yr|以给定的概率p保持在集合s中;s具体为:
75、
76、其中,c为表示集合大小的常数;
77、步骤4.9、令稳定裕度常数c1为:
78、
79、其中λmin(a1)为a1的最小特征值;
80、令稳定界常数d1为:
81、
82、其中,为1/(1-ηi)的导数的最大幅值;
83、设计ai、κi、κk、κζ,使得:
84、
85、此时对于满足式(5)的故障,式(13)容错等价控制律与式(23)自适应更新律使高阶状态变量z和关于执行器故障的估计误差达到概率意义下的一致有界,并且控制误差的绝对值|y-yr|以给定的概率p保持在集合(24)中。
86、本发明所带来的有益技术效果:
87、本发明针对含有随机干扰信号的旋转导向钻井工具平台,基于随机高阶全驱系统模型开发了一种新的自适应容错跟踪控制律,可以在发生执行器部分失效故障和偏置故障时实现系统对参考信号的跟踪,并且保证状态以指定的概率收敛到指定的界内,具有良好的容错能力。
88、与现有的容错镇定控制方法不同,本发明方法可以实现对参考信号的跟踪,应用范围更广;与现有的保证系统状态期望有界性能的方法不同,本发明方法可以保证状态以指定的概率收敛到指定的界内,安全性更高;此外,与传统的基于一阶状态方程的方法相比,本发明的控制律设计方法更加便利。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200147.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表