一种自主水下机器人轻量化在线路径规划方法
- 国知局
- 2024-08-01 00:14:29
本发明涉及水下机器人,尤其是一种自主水下机器人轻量化在线路径规划方法。
背景技术:
1、目前,自主水下机器人被广泛应用于各种水下任务领域。自主水下机器人的航行路径的质量直接决定了任务的执行效率。然而,受海洋环境中的通信困难和有限能源补给的约束,自主水下机器人无法获得足够的云端计算配套服务和外部能源供应。自主水下机器人只能依靠其有限的硬件计算和能源携带能力,在强动态洋流的干扰下独立生成执行任务的路径。因此,存在着两个需要迫切解决的关键问题:
2、1)如何制定轻量化水下机器人路径规划方法,增强方法的在线适用性;
3、2)如何构建一种能够有效处理动态洋流的策略,减少水下机器人的航行时间和能源消耗。
4、近年来,一些图搜索算法(dijkstra算法、a*算法和d*算法等)被提出以减少水下机器人的航行能量消耗。然而,上述图搜索算法在处理复杂的图拓扑结构时,路径搜索效率严重不足,导致路径规划效率低下。另外,受益于优越的全局优化能力,许多基于群智能理论的优化算法,如双层混合算法、量子行为粒子群优化和自适应遗传算法等被提出以生成可行的路径。但是,群智能优化算法需要先验的全局场景信息,而这在动态场景中是不准确的。同时,在强动态的场景中,上述算法需要被频繁地重启以跟踪快速动态场景,从而造成巨大的计算工作量。因此,如何设计出一种轻量化的方法,以实现动态海洋情景下的路径规划是一个关键科学问题。另外,洋流可以直接影响航行速度和航行距离。有利的洋流可以实现航行速度和航行距离的平衡,从而优化航行时间和航行能耗。反之,相反,不利的洋流会不必要地增加自主水下机器人(autonomous underwater vehicle,以下简称auv)的导航时间和能源消耗。此外,在强动态海洋情景中,全局洋流信息是难以准确获得的。因此,如何利用有限的局部邻近洋流信息,实现高质量的水下机器人路径规划是另一个迫切需要解决的关键科学问题。
技术实现思路
1、本发明需要解决的技术问题是提供一种自主水下机器人轻量化在线路径规划方法,能够利用有限的局部邻近洋流信息,实现高质量的水下机器人路径规划。
2、为解决上述技术问题,本发明所采用的技术方案是:
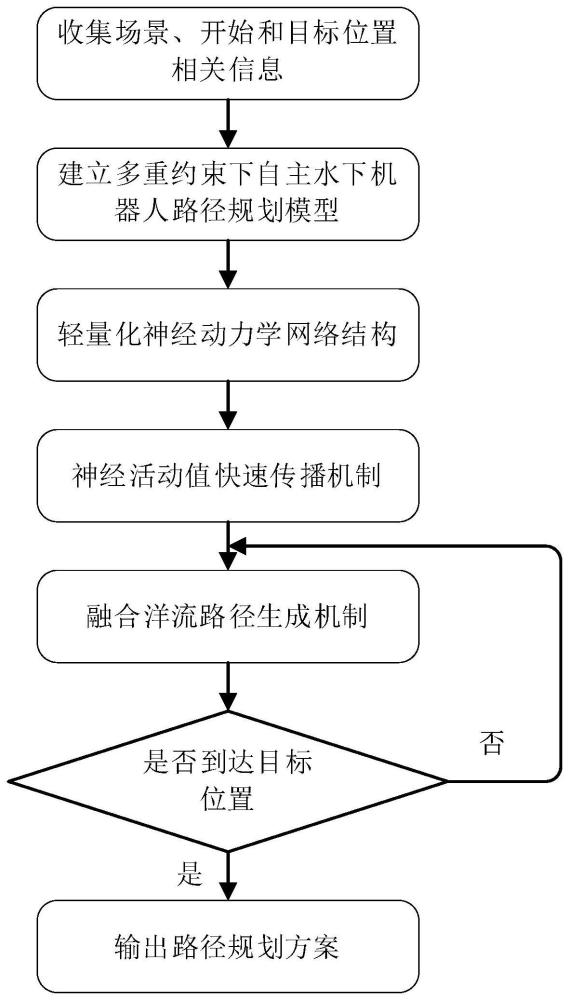
3、一种自主水下机器人轻量化在线路径规划方法,包括以下步骤:
4、s1、建立强动态海洋环境路径规划模型;
5、s2、构建在线映射强动态海洋环境的轻量化神经动力学网络结构;
6、s3、建立神经动力学网络的神经活动值快速传播机制;
7、s4、构建融合洋流信息和神经活动值的路径生成机制;
8、s5、基于神经动力学理论自主水下机器人路径规划算法性能评价。
9、本发明技术方案的进一步改进在于:s1中,自主水下机器人从开始位置sp出发,自主躲避水下障碍物并抵抗强动态洋流干扰,航行到目标位置tp;水下场景分为许多相同的单元;这些单元分为两类:障碍单元和空单元;障碍单元和自由单元的位置用两个集合:和来分别表示;自主水下机器人的路径用集合来表示;两个相邻单元之间的路径由其中心坐标之间的直线段定义;路径长度用欧氏距离来计算;由于所划分的单元足够小,可以假设导航速度和洋流在一个单元是相同的;自主水下机器人的速度由下式计算:
10、
11、
12、
13、其中,是自主水下机器人自身引擎提供的速度;是洋流的速度,是自主水下机器人的实际航行速度;代表从划分的单元i到单元j的航行方向向量;θij代表和之间的角度;
14、从划分的单元i到单元j之间的航行时间用下式表示:
15、
16、其中,|i-j|代表从单元i到单元j之间的欧式距离;
17、因此,自主水下机器人的总的航行时间为:
18、
19、当自主水下机器人的引擎提供的速度保持恒定值时,单位时间的能耗也是固定的;因此,总的能量消耗等价于总的航行时间。
20、本发明技术方案的进一步改进在于:s2中,二维场景被分为六边形;三维场景是二维场景的叠加,即,三维场景被划分为六棱柱;
21、轻量化神经动力学网络结构包括神经元和相邻神经元之间的权值,二维场景下的轻量化神经动力学网络结构是一个单层结构,所有的神经元均匀排布在一个平面上,所有的神经元间连接权值均相同;三维场景下的轻量化神经动力学网络结构是一个多层结构,由多个平面所构成,所有神经元均匀排布在不同的平面上;同层以及处于同一竖直方向的相邻神经元之间的连接权值为同一数值,其余连接权值同为另一数值。
22、本发明技术方案的进一步改进在于:s3中,神经活动值快速传播机制如下:
23、
24、
25、
26、
27、其中,表示tite+1迭代时神经元的神经活动值;相应地,表示神经元nj在前一次迭代tite时的神经活动值;nj∈j={1,2,...nj}表示ni的相邻神经元;在研究中,ni和nj之间的连接权值λij用(7)计算,其中|pi-pj|为单元i和j的距离;kv为正参数,与神经活动值的下降率呈正相关;ei表示外部因子,它由单元i的状态来定义;在(8)中,e是一个无穷大的正值;转化函数f(x)确保了
28、本发明技术方案的进一步改进在于:s4具体包括以下步骤:
29、s41建立洋流和神经活动值的局部融合策略;
30、建立洋流和神经活动值的局部融合策略:
31、
32、kd=kd·ln(dct+1), (11)
33、
34、
35、其中,a∈a={1,2,...,a}表示当前单元c的邻近单元集合;是神经元na重建后的神经活动值;vna是神经元na的原始神经活动值;d是一个正常数,其值与场景的大小和维度呈正相关;tc,a是在洋流的作用下,从当前单元c到相邻单元a的最少航行时间;kn和kd为权重参数;kd是有利洋流的判断系数;当邻近洋流和当前航行方向之间的夹角θca小于π/2,或者邻近洋流的速度大小小于自主水下机器人自身航行速度大小的0.25倍时,kd=k,反之,kd=0;
36、s42建立路径选择策略;
37、建立路径选择策略:
38、
39、其中,pn是从相邻位置集合中选择的下一个路径点;和分别为融合洋流后的相邻最大神经活动值和次级神经活动值;ks为神经活动值强度的评价系数;得益于所提出的路径选择策略,可以有效地避免由于贪婪地追求略快的航行速度而导致的过度航行长度。
40、s43结合局部融合策略和路径选择策略构建融合洋流路径生成机制;
41、融合洋流路径生成机制由提出的局部融合策略和路径选择策略组成;局部融合策略能够将洋流的影响融合进原始神经活动值梯度中,从而重建神经活动值梯度;原始神经活动值梯度的上升方向能反映出了最短路径;而重建后的神经活动值梯度的上升方向能够反映出利用有利洋流,避开不利洋流的趋势;然后,原始神经活动值梯度和重建的神经活动值梯度被一起输入到路径选择策略中;路径选择策略通过全面评估原始神经活动值梯度和融合洋流所重建的神经活动值梯度的所生成路径的质量,实现水下机器人的航行速度和航行路程之间的平衡,从而做出最优路径决策。
42、由于采用了上述技术方案,本发明取得的技术进步是:
43、1、本发明在准确描述场景的前提下,提出蜂窝式划分来构造低连接计算神经动力学网络结构,其中包含较少的相邻神经元和自由计算的神经连接权值。参与神经活动值更新的神经元较少,从而提高了更新效率。此外,神经连接权值可以直接获得,无需额外的计算。
44、2、为了提高神经活动值的传播效率,本发明提出了一种神经活动值快速传播机制。构造了定向便捷的传播公式,以增强神经活动值的传播方向性,从而减少重复更新迭代,从而提高神经动力学网络的收敛速度。
45、3、本发明提出的融合洋流路径生成机制可以自适应地将相邻洋流信息融合进神经活动值,从而重建神经活动值梯度。积极利用相对有利的洋流,避免相对不利的洋流。这一机制的本质是,由洋流引起的额外的航行成本被自适应地加权,以重新计算神经活动值。这样,重建的神经活动值梯度的向上方向可以及时地反映出自主水下机器人的低航行时间和能量消耗路径。可以有效地增强自主水下机器人对抗强动态外部洋流场景的能力。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200180.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表