一种浮游式水下管道巡检机器人及其驱动方法
- 国知局
- 2024-08-01 00:18:13
本发明涉及水下机器人,特别是涉及一种浮游式水下管道巡检机器人及其驱动方法。
背景技术:
1、水下输送管道由于其不受水深、地形等条件限制,具有输送效率高、耗能少等特点。水下输送管道包括铺设在浅水层中和埋没在水底土层下两种铺设方式,其中,铺设在浅水层中的水下输送管道因其铺设环境,其外壁极易受到过往水中生物以及水下设备的寄生和刮蹭,因此需要定期进行水中生物清洁、结构检测、维修等运维作业,而传统的人工水下作业,操作复杂,会耗费大量的人力物力,成本较高,并且人身安全也无法得到保障。传统的水下管道监测仪,往往会出现监测失误率高,不能全方面全部位监测等问题,而二次检测又会进一步提高成本,因此大幅降低了其实用性;此外,传统监测仪对管道损坏处不能进行更进一步的数据采集,极易导致技术人员对损坏部位损坏情况的错判,进而引发一些安全事故;再者由于水下环境复杂,噪声的影响较大,传统水下声纳导航系统定位精度较差,且对远距离定位需要预先布设参考信标阵列,成本较高。
2、为了解决这一系列痛点,目前研发了多种浅水层管道外壁巡检机器人。根据系统联系方式的不同,可分为有缆水下机器人(remote operated vehicle,rov)和无缆水下机器人(autonomous underwater vehicle,auv)。
3、然而,传统有缆水下机器人需要由电缆从母船接受动力,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视,电缆向本体提供动力和交换信息,中继器可减少电缆对本体运动的干扰。由于通过电缆对rov进行遥控操作,细长的电缆悬在海中成为rov最脆弱的部分,大大限制了机器人的活动范围和工作效率,且电缆易缠绕和对线缆依赖更强,需要随行控制端共同行动,且操控复杂。
4、无缆机器人常见的外壁巡检方式包括卡管,虽然卡管具有循迹简单的优点,但其为了适应各种粗细的管道或电缆时,容易出现结构复杂、形状难匹配等缺点,并容易产生磨损、对管道造成二次损坏,最终造成管道和机器人的使用寿命的下降,故其使用范围也比较有限。
5、对于浮游式水下机器人(简称浮游式auv),作为目前应用最广泛的水下机器人之一,具有活动范围大、机动性好、可穿梭进入复杂结构、无需水面支持、安全、智能化等优点,成为完成各种水下任务的重要工具。此外,随着硬件计算性能的逐步提升、各种传感器的精度提高、储能技术的不断发展,深度学习的飞速进步,浮游式auv的应用也越来越广,功能也越来越强。由于水下环境通常具有噪声信号大、通信与定位困难、移动平台运动的不确定性等挑战,因此具有更高自由度的浮游式auv更适合进行各种水下任务,但这也对机器人的运动控制和感知能力有了更高的需求。
技术实现思路
1、为了解决上述问题,本发明提出了一种浮游式水下管道巡检机器人及其驱动方法,结合gps和北斗双定位、水下视觉循迹和惯性导航的三类定位方式耦合导航,解决传统水下管道巡检机器人运动范围小、卡管移动存在管道损伤风险、管内巡检需要停止管道运行以及导航精度低、定位成本高等问题。
2、为了实现上述目的,本发明采用如下技术方案:
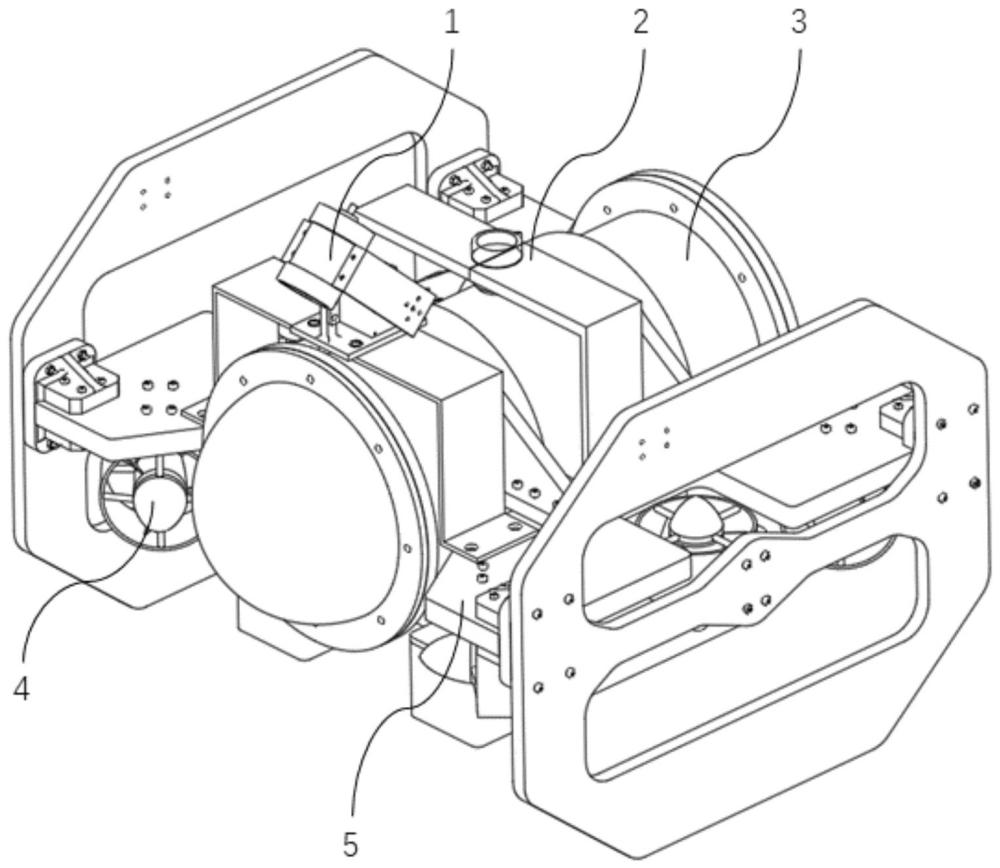
3、第一方面,本发明提供一种浮游式水下管道巡检机器人,包括:机器人本体,以及设于机器人本体上的摄像模块、推进模块、测距模块、导航模块、imu模块和主控模块;
4、所述摄像模块,包括舵机和设于舵机上的摄像头,舵机用于带动摄像头的俯仰旋转,摄像头用于获取机器人位于管上或管下时的水下巡检图像;
5、所述推进模块,包括用于提供水平方向xy轴移动与yaw轴旋转的水平推进器和用于提供z轴浮潜运动的深度推进器;
6、所述测距模块,用于检测机器人位于管上或管下时与水下管道的距离;
7、所述导航模块,用于定位机器人位置;
8、所述imu模块,用于检测机器人运动姿态;
9、所述主控模块,被配置为根据当前机器人位置控制推进模块的动作,以驱动机器人到达指定巡检位置,并根据当前机器人运动姿态控制水平推进器的动作,以驱动机器人旋转,改变机器人运动姿态,同时根据水下巡检图像识别水下管道位置;以及对水下管道进行巡检时,根据设定的巡检任务、水下巡检图像和机器人与水下管道的距离,控制舵机和推进模块的动作,以控制摄像头对水下管道巡检点图像的采集。
10、作为可选择的实施方式,所述机器人本体包括主架和主舱,所述主架包括结构相同的第一子主架和第二子主架,第一子主架和第二子主架设置在机器人的两侧,第一子主架和第二子主架均包括侧板、主板和主侧板连接器,主板的两端均通过主侧板连接器与侧板连接。
11、作为可选择的实施方式,所述摄像模块、推进模块和测距模块设于主舱外,导航模块、imu模块和主控模块设于主舱内;所述主舱包括主舱主体,设于主舱主体前端的主舱前盖、设于主舱主体后端的主舱后盖、设于主舱主体上部的顶部支架以及设于主舱主体底部的底部支架和加固支架;主舱前盖为半球形且透明,主舱后盖预留有用于内部引出线的孔洞,主舱主体通过顶部支架与底部支架固定于主板上,底部支架下设有加固支架。
12、作为可选择的实施方式,在单侧的主板的两端分别设一个水平推进器,水平推进器呈45度角水平安装,共提供3个自由度的运动;在两侧主板的中间各设有一个竖直安装的深度推进器,提供1个自由度的运动。
13、作为可选择的实施方式,所述测距模块包括顶部测距模块和底部测距模块,顶部测距模块用于检测机器人在管下巡检时与水下管道的距离,底部测距模块用于检测机器人在管上巡检时与水下管道的距离。
14、作为可选择的实施方式,巡检任务中的任务信息包括:管道巡检起点的经纬度坐标与深度、管道巡检距离或管道巡检终点经纬度坐标、所需巡检管道的范围与地图、需要对管道进行巡检的部分以及返航基地经纬度坐标。
15、作为可选择的实施方式,巡检任务包括:对管道上部进行巡检,则此时机器人沿水下管道上方运动,且摄像头保持斜向下;对管道上中部进行巡检,则此时机器人先沿水下管道左上方运动至管道巡检终点,再掉头继续沿水下管道左上方返回管道巡检起点;对管道全侧进行巡检,则此时机器人先沿水下管道上方运动至管道巡检终点后,再掉头并移至水下管道下方,沿原线路反向巡检至管道巡检起点。
16、作为可选择的实施方式,获取巡检任务后,基于导航模块定位的机器人位置,控制推进模块的动作,以驱动机器人在水上行驶前往管道巡检起点;当到达管道巡检起点后,通过控制推进模块的动作,驱动机器人下潜至水中,直至到达指定深度后将导航模块切换为imu模块。
17、作为可选择的实施方式,当机器人到达指定巡检位置后,通过控制水平推进器的动作,以驱动机器人进行360°旋转,同时通过摄像头获取的水下巡检图像判断是否发现水下管道,若发现水下管道,则开启巡检;若旋转后未发现水下管道,则驱动机器人上浮至水面并切回导航模块,矫正当前经纬度坐标并重复上述步骤,直至发现水下管道,若矫正次数超过设定次数,则返航。
18、作为可选择的实施方式,对水下管道进行巡检时,若根据水下巡检图像检测到有管道异常点,则记录当前的水下巡检图像、异常点相对管道的位置、异常点的经纬度坐标、异常点相对管道巡检起点的距离和异常点形状。
19、作为可选择的实施方式,对水下管道进行巡检时,每隔设定时间,控制机器人上浮至水面,并通过导航模块获取机器人当前位置,以清除当前累计误差,并对两次上浮间的异常点位置进行修正。
20、第二方面,本发明提供一种第一方面所述的浮游式水下管道巡检机器人的驱动方法,包括:
21、判断是否获取完整的巡检任务;若获取的巡检任务不全或无巡检任务,则待机等待,当等待时间超过设定时间后,则返航;
22、获取巡检任务后,基于导航模块定位的机器人位置,控制推进模块的动作,以驱动机器人在水上行驶前往管道巡检起点,当到达管道巡检起点后,通过控制推进模块的动作,驱动机器人下潜至水中,直至到达指定深度后将导航模块切换为imu模块;
23、当机器人到达指定巡检位置后,通过控制水平推进器的动作,以驱动机器人进行360°旋转,同时通过摄像头获取的水下巡检图像判断是否发现水下管道,若发现水下管道,则开启巡检;若旋转后未发现水下管道,则驱动机器人上浮至水面并切回导航模块,矫正当前经纬度坐标并重复上述步骤,直至发现水下管道,若矫正次数超过设定次数,则返航;
24、对水下管道进行巡检时,根据设定的巡检任务、水下巡检图像和机器人与水下管道的距离,控制舵机和推进模块的动作,以控制摄像头对水下管道巡检点图像的采集,若检测到有管道异常点,则记录当前的水下巡检图像、异常点相对管道的位置、异常点的经纬度坐标、异常点相对管道巡检起点的距离和异常点形状;同时每隔设定时间,控制机器人上浮至水面,通过导航模块获取机器人当前位置,以清除当前累计误差,并对两次上浮间的异常点位置进行修正。
25、与现有技术相比,本发明的有益效果为:
26、(1)针对传统水下管道巡检机器人中rov的运动范围小、卡管移动存在管道损伤风险、管内巡检需要停止管道运行等问题,与以声纳为主的导航系统导航精度低、定位成本高等问题,本发明设计一种结合gps和北斗双定位、水下视觉循迹和惯性导航的三类定位方式耦合导航的浮游式水下管道巡检机器人及其驱动方法。
27、其中,本发明通过gps与北斗的粗定位与视觉循迹导航和惯导的细定位和定期误差清除,实现低成本对管道损坏位置较高精度的定位,解决水下定位困难问题。
28、由于传统管内巡检机器人需要预先停止管道运输,并对管道进行清洁,巡检成本高。故本发明采取浮游式auv作为载体,可在管道外侧进行巡检,无需停止管道运输即可同步巡检。
29、本发明搭载惯导的四自由度运动系统结合测距模块和俯仰摄像头,具体是基于六螺旋桨组成的推进模块实现四自由度移动,配合俯仰云台摄像头与测距模块,实现在与管道保持安全距离的情况下对水下管道进行360°巡检,不再局限于仅对管道正上方进行巡检,也可位于管道下方进行巡检,适用范围更广,实现更加平稳的多自由度水下运动与巡管,实现对管道更全面更灵活的巡检,解决卡管等移动方式可能对管道造成损坏的问题。该机器人通过多种导航手段的耦合与多自由度的运动系统,可以实现超过大多数传统巡管机器人的长时间定位精度与移动性能。
30、(2)本发明中通过对水下巡检图像的处理与分析,对水下管道的漏点与污点进行记录与统计,并回传至云平台,待巡检完毕,机器人自动上浮并返回。设计一整套的巡检任务流程,实现自主前往任务地点、自主完成管道近360°巡检和自主返航与上传巡检记录的功能,给机器人带来更强的自主任务能力,提高了水下机器人的应用范围。
31、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200514.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。