一种机器人遥操作控制方法、系统、电子设备及存储介质与流程
- 国知局
- 2024-08-01 00:21:19
本发明涉及机器人控制,尤其是一种机器人遥操作控制方法、系统、电子设备及存储介质。
背景技术:
1、在工业生产中,人们常常借助机器人来完成任务,而对于一些危险的或者太过偏远的环境,人类操作员通常是不方便到达现场操作机器人的,例如对洪水或者火灾中的机房进行抢险救灾。另一方面,工作人员跨越不同的区县甚至省市去完成一个任务的情况也属常态,这就造成了大量时间、金钱成本的浪费。面对这些困境,迫切需要一种能够远程操控机器人完成任务的控制方法,使得机器人执行难以完成的危险任务成为可能,同时保护工作人员的人身安全并大大提高效率。
2、遥操作系统结合人类操作员和机器人设备,实现了远程操作控制的人机交互,是人类感知和操纵能力对远程环境的扩展,从而将人类的能力扩展到偏远或难以到达的地点,使得任务完成率与工作效率被大大提高。操作员通过遥操作系统,可以将人类的能力扩展到偏远或难以到达的地点,从而确保机器人完成操作员希望做却难以做到的事情。对于要求较高的任务,例如抢险救援等任务,需要远端的从机器人在执行任务的过程中精确跟踪操作员给定的轨迹,主机器人产生的位置信息以及位置的变化关系通过信息通道传递给从机器人,从机器人随之运动并产生位置信息,即实现主从机器人之间的协同。基于这种需求,近年来,国内外已有许多关于协同控制的研究成果,例如阻滑模控制算法。滑模控制的主要优点在于选择滑动变量后所设计的控制策略的简单性,使用不连续控制器时的鲁棒性以及闭环系统轨迹到达滑动表面的有限时间收敛。然而,对于有限时间控制,系统收敛时间随着系统初始值的增长而无限增加。考虑到一些要求非常高的系统,无论系统的初始值是多少,都希望收敛时间可以根据实际需要进行调整,也就是说亟需发明一种可实现的、具有优秀性能的遥操作系统的固定时间控制方法,确保从端机器人在可知的、不受初值影响的固定时间内跟踪上主端轨迹,以减少机器人控制误差和轨迹跟踪时间,提高机器人的工作效率。
3、术语解释:
4、遥操作系统:一种必须包含人类操作员、主机器人、信息传输通道、从机器人和外部环境的系统。是人类感知和操纵能力对远程环境的扩展,从而能够将人类的能力扩展到偏远或难以到达的地点。
5、滑模控制:一种非线性控制方法,该控制策略的系统“结构”不稳定,可以根据系统当前所处的状态不断变化,强制系统状态沿着“滑模面”滑向所需平衡。
6、固定时间稳定:实现固定时间稳定的系统其系统收敛时间只受系统参数的影响,与系统初始状态无关。
7、lyapunov稳定性定理:常用来分析非线性系统的稳定性,通过模拟系统能量的函数来判断系统的稳定性。
技术实现思路
1、本发明的目的在于至少一定程度上解决现有技术中存在的技术问题之一。
2、为此,本发明实施例的一个目的在于提供一种机器人遥操作控制方法,该方法可准确控制从机器人随着主机器人的运动轨迹而运动,提高了机器人遥操作控制的效率和准确性,减少了机器人控制误差和轨迹跟踪时间,提高了机器人的工作效率。
3、本发明实施例的另一个目的在于提供一种机器人遥操作控制系统。
4、为了达到上述技术目的,本发明实施例所采取的技术方案包括:
5、一方面,本发明实施例提供了一种机器人遥操作控制方法,包括以下步骤:
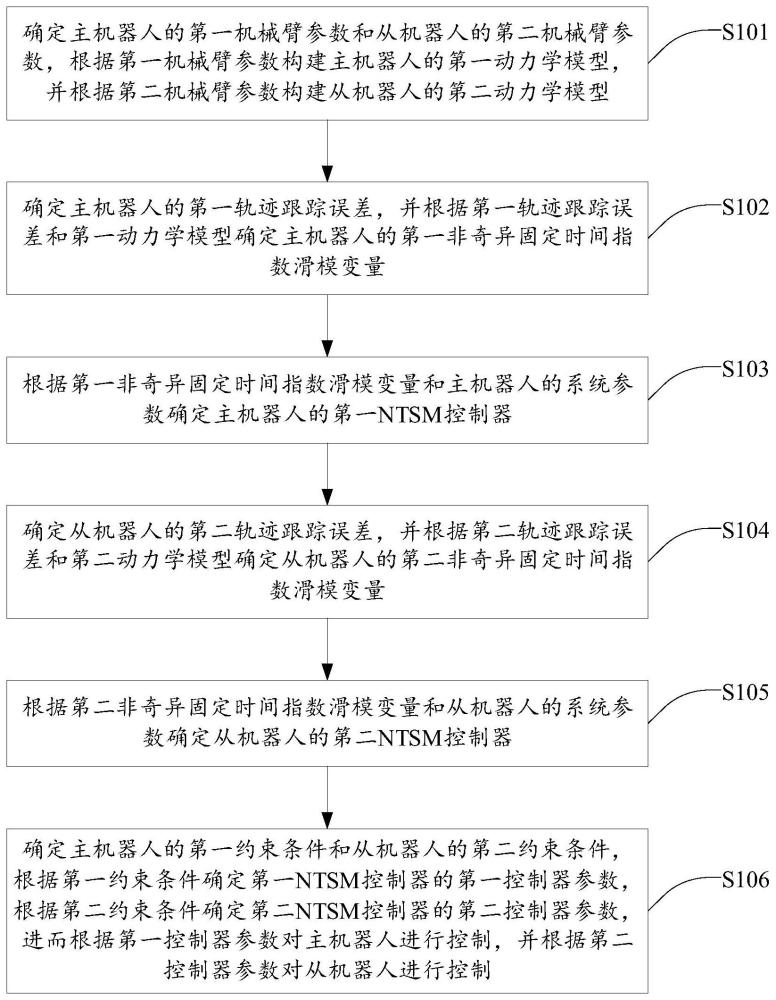
6、确定主机器人的第一机械臂参数和从机器人的第二机械臂参数,根据所述第一机械臂参数构建所述主机器人的第一动力学模型,并根据所述第二机械臂参数构建所述从机器人的第二动力学模型;
7、确定所述主机器人的第一轨迹跟踪误差,并根据所述第一轨迹跟踪误差和所述第一动力学模型确定所述主机器人的第一非奇异固定时间指数滑模变量;
8、根据所述第一非奇异固定时间指数滑模变量和所述主机器人的系统参数确定所述主机器人的第一ntsm控制器;
9、确定所述从机器人的第二轨迹跟踪误差,并根据所述第二轨迹跟踪误差和所述第二动力学模型确定所述从机器人的第二非奇异固定时间指数滑模变量;
10、根据所述第二非奇异固定时间指数滑模变量和所述从机器人的系统参数确定所述从机器人的第二ntsm控制器;
11、确定所述主机器人的第一约束条件和所述从机器人的第二约束条件,根据所述第一约束条件确定所述第一ntsm控制器的第一控制器参数,根据所述第二约束条件确定所述第二ntsm控制器的第二控制器参数,进而根据所述第一控制器参数对所述主机器人进行控制,并根据所述第二控制器参数对所述从机器人进行控制。
12、进一步地,在本发明的一个实施例中,所述确定主机器人的第一机械臂参数和从机器人的第二机械臂参数,根据所述第一机械臂参数构建所述主机器人的第一动力学模型,并根据所述第二机械臂参数构建所述从机器人的第二动力学模型这一步骤,其具体包括:
13、确定所述主机器人的第一机械臂参数,所述第一机械臂参数包括第一连杆长度、第一连杆质量以及第一关节角位置;
14、根据所述第一机械臂参数确定第一离心力与哥氏力矩阵、第一重力矩阵以及第一对称正定惯性矩阵,进而根据所述第一离心力与哥氏力矩阵、所述第一重力矩阵以及所述第一对称正定惯性矩阵构建所述第一动力学模型;
15、确定所述从机器人的第二机械臂参数,所述第二机械臂参数包括第二连杆长度、第二连杆质量以及第二关节角位置;
16、根据所述第二机械臂参数确定第二离心力与哥氏力矩阵、第二重力矩阵以及第二对称正定惯性矩阵,进而根据所述第二离心力与哥氏力矩阵、所述第二重力矩阵以及所述第二对称正定惯性矩阵构建所述第二动力学模型。
17、进一步地,在本发明的一个实施例中,所述确定所述主机器人的第一轨迹跟踪误差,并根据所述第一轨迹跟踪误差和所述第一动力学模型确定所述主机器人的第一非奇异固定时间指数滑模变量这一步骤,其具体包括:
18、确定所述主机器人的机械臂的第一关节理想轨迹和第一关节实际轨迹;
19、根据所述第一关节理想轨迹和所述第一关节实际轨迹确定所述第一轨迹跟踪误差;
20、根据所述第一轨迹跟踪误差和所述第一动力学模型确定所述第一轨迹跟踪误差的第一动态模型;
21、根据所述第一动态模型确定所述第一非奇异固定时间指数滑模变量。
22、进一步地,在本发明的一个实施例中,所述根据所述第一非奇异固定时间指数滑模变量和所述主机器人的系统参数确定所述主机器人的第一ntsm控制器这一步骤,其具体包括:
23、根据所述第一非奇异固定时间指数滑模变量确定第三约束条件,所述第三约束条件使得所述第一非奇异固定时间指数滑模变量在预设固定时间内等于0;
24、根据所述主机器人的系统参数设计所述主机器人的多个待确定的所述第一控制器参数,根据所述第三约束条件和待确定的所述第一控制器参数确定所述第一ntsm控制器。
25、进一步地,在本发明的一个实施例中,所述确定所述从机器人的第二轨迹跟踪误差,并根据所述第二轨迹跟踪误差和所述第二动力学模型确定所述从机器人的第二非奇异固定时间指数滑模变量这一步骤,其具体包括:
26、根据信号传输时延确定所述主机器人传输至所述从机器人的第二关节理想轨迹,并确定所述从机器人的机械臂的第二关节实际轨迹;
27、根据所述第二关节理想轨迹和所述第二关节实际轨迹确定所述第二轨迹跟踪误差;
28、根据所述第二轨迹跟踪误差和所述第二动力学模型确定所述第二轨迹跟踪误差的第二动态模型;
29、根据所述第二动态模型确定所述第二非奇异固定时间指数滑模变量。
30、进一步地,在本发明的一个实施例中,所述根据所述第二非奇异固定时间指数滑模变量和所述从机器人的系统参数确定所述从机器人的第二ntsm控制器这一步骤,其具体包括:
31、根据所述第二非奇异固定时间指数滑模变量确定第四约束条件,所述第四约束条件使得所述第二非奇异固定时间指数滑模变量在预设固定时间内等于0;
32、根据所述从机器人的系统参数设计所述从机器人的多个待确定的所述第二控制器参数,根据所述第四约束条件和待确定的所述第二控制器参数确定所述第二ntsm控制器。
33、进一步地,在本发明的一个实施例中,所述确定所述主机器人的第一约束条件和所述从机器人的第二约束条件,根据所述第一约束条件确定所述第一ntsm控制器的第一控制器参数,根据所述第二约束条件确定所述第二ntsm控制器的第二控制器参数,进而根据所述第一控制器参数对所述主机器人进行控制,并根据所述第二控制器参数对所述从机器人进行控制这一步骤,其具体包括:
34、通过lyapunov稳定性定理确定所述第一轨迹跟踪误差、所述第一控制器参数、第一滑模面参数以及预设的第一收敛时间之间的约束关系,得到所述第一约束条件;
35、根据所述第一约束条件对所述第一ntsm控制器和所述第一非奇异固定时间指数滑模变量进行参数求解,确定所述第一控制器参数和所述第一滑模面参数的取值;
36、通过lyapunov稳定性定理确定所述第二轨迹跟踪误差、所述第二控制器参数、第二滑模面参数以及预设的第二收敛时间之间的约束关系,得到所述第二约束条件;
37、根据所述第二约束条件对所述第二ntsm控制器和所述第二非奇异固定时间指数滑模变量进行参数求解,确定所述第二控制器参数和所述第二滑模面参数的取值;
38、根据所述第一控制器参数和所述第一滑模面参数对所述主机器人进行控制,并根据所述第二控制器参数和所述第二滑模面参数对所述从机器人进行控制。
39、另一方面,本发明实施例提供了一种机器人遥操作控制系统,包括:
40、动力学模型构建模块,用于确定主机器人的第一机械臂参数和从机器人的第二机械臂参数,根据所述第一机械臂参数构建所述主机器人的第一动力学模型,并根据所述第二机械臂参数构建所述从机器人的第二动力学模型;
41、第一滑模变量确定模块,用于确定所述主机器人的第一轨迹跟踪误差,并根据所述第一轨迹跟踪误差和所述第一动力学模型确定所述主机器人的第一非奇异固定时间指数滑模变量;
42、第一ntsm控制器确定模块,用于根据所述第一非奇异固定时间指数滑模变量和所述主机器人的系统参数确定所述主机器人的第一ntsm控制器;
43、第二滑模变量确定模块,用于确定所述从机器人的第二轨迹跟踪误差,并根据所述第二轨迹跟踪误差和所述第二动力学模型确定所述从机器人的第二非奇异固定时间指数滑模变量;
44、第二ntsm控制器确定模块,用于根据所述第二非奇异固定时间指数滑模变量和所述从机器人的系统参数确定所述从机器人的第二ntsm控制器;
45、控制参数确定模块,用于确定所述主机器人的第一约束条件和所述从机器人的第二约束条件,根据所述第一约束条件确定所述第一ntsm控制器的第一控制器参数,根据所述第二约束条件确定所述第二ntsm控制器的第二控制器参数,进而根据所述第一控制器参数对所述主机器人进行控制,并根据所述第二控制器参数对所述从机器人进行控制。
46、另一方面,本发明实施例提供了一种电子设备,所述电子设备包括存储器、处理器、存储在所述存储器上并可在所述处理器上运行的程序以及用于实现所述处理器和所述存储器之间的连接通信的数据总线,所述程序被所述处理器执行时实现如前面所述的机器人遥操作控制方法。
47、另一方面,本发明实施例还提供了一种存储介质,所述存储介质为计算机可读存储介质,用于计算机可读存储,所述存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现如前面所述的机器人遥操作控制方法。
48、本发明的优点和有益效果将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到:
49、本发明实施例确定主机器人的第一机械臂参数和从机器人的第二机械臂参数,根据第一机械臂参数构建主机器人的第一动力学模型,并根据第二机械臂参数构建从机器人的第二动力学模型,确定主机器人的第一轨迹跟踪误差,并根据第一轨迹跟踪误差和第一动力学模型确定主机器人的第一非奇异固定时间指数滑模变量,根据第一非奇异固定时间指数滑模变量和主机器人的系统参数确定主机器人的第一ntsm控制器,确定从机器人的第二轨迹跟踪误差,并根据第二轨迹跟踪误差和第二动力学模型确定从机器人的第二非奇异固定时间指数滑模变量,根据第二非奇异固定时间指数滑模变量和从机器人的系统参数确定从机器人的第二ntsm控制器,确定主机器人的第一约束条件和从机器人的第二约束条件,根据第一约束条件确定第一ntsm控制器的第一控制器参数,根据第二约束条件确定第二ntsm控制器的第二控制器参数,进而根据第一控制器参数对主机器人进行控制,并根据第二控制器参数对从机器人进行控制。本发明实施例可准确控制从机器人随着主机器人的运动轨迹而运动,实现了主从机器人的协同控制,提高了机器人遥操作控制的效率和准确性,减少了机器人控制误差和轨迹跟踪时间,提高了机器人的工作效率。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200732.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表