一种倾转旋翼飞行器的建模和姿态控制方法
- 国知局
- 2024-08-01 00:22:39
本发明涉及飞行器,具体为一种倾转旋翼飞行器的建模和姿态控制方法。
背景技术:
1、在过去的几十年里,飞行器经历了巨大的发展,并在各个领域得到了广泛的应用。目前,大多数飞行器可以分为两类,即固定翼飞行器和旋翼飞行器。前者通过机翼气动外形产生所需的升力,能够做到长距离的高速飞行。但是需要专门设计的跑道或着陆设备;后者通过垂直向上的旋翼产生升力,可以在狭小的空间内工作,同时具有独特的悬停能力。但是飞行速度和续航能力不足。
2、与传统飞行器相比,倾转旋翼飞行器具有固定机翼和多个可倾斜旋翼。根据旋翼倾斜角度有三种飞行模式,分别为直升机模式、飞机模式和过渡模式。因此,倾转旋翼飞行器能够结合两种类型飞行器的优势,具有非常光明的应用前景。
3、然而,倾转旋翼飞行器是一个高度复杂的系统,其结构和气动特性在三种飞行模式之间变化显著且相互耦合,其动力学模型难以建立。现有方法多采用了牛顿-欧拉法或欧拉-拉格朗日法建立的非线性动力学模型,其存在以下缺陷:一是缺少关键参数,动力学模型难以建立;二是模型结构复杂,控制器难以设计,控制参数难以整定;三是大多数研究仅通过简化模型进行计算机软件仿真实验进行测试,还需在实际飞行器中进行性能和安全性测试,为此,本发明提出了一种倾转旋翼飞行器的建模和姿态控制方法解决上述缺陷。
技术实现思路
1、本发明的目的在于提供一种倾转旋翼飞行器的建模和姿态控制方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,一种倾转旋翼飞行器的建模和姿态控制方法,包括如下步骤:
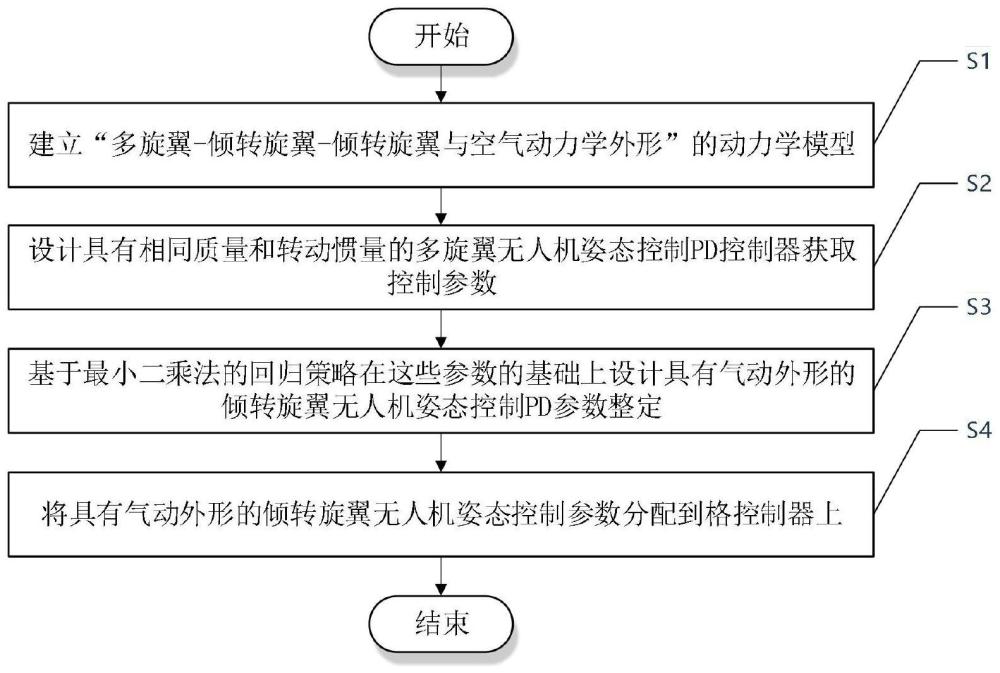
3、步骤s1、建立“多旋翼-倾转旋翼-倾转旋翼与空气动力学外形”的动力学模型;
4、步骤s2、设计具有相同质量和转动惯量的多旋翼飞行器姿态控制pd控制器获取控制参数;
5、步骤s3、基于最小二乘法的回归策略,在步骤s2的参数的基础上设计具有气动外形的倾转旋翼飞行器姿态控制pd参数整定;
6、步骤s4、将上述具有气动外形的倾转旋翼飞行器姿态控制参数分配到各控制器上;
7、步骤s5、根据所述控制器的控制参数分配方法,将分别获得具有气动外形倾转旋翼飞行器副翼、方向舵和升降舵的pd控制参数,以及各旋翼倾斜角度和转速的控制来完成整体飞行器的姿态控制。
8、优选的:所述步骤s1中倾转旋翼飞行器绕各轴的转矩大小由推力、旋翼倾斜角度和旋翼轴向力矩系数决定,固定翼飞行器绕各轴的转矩大小由飞行器的气动外形决定。
9、优选的:所述步骤s1中倾转旋翼飞行器的动力学模型的表达式如下:
10、
11、
12、
13、其中,lz、lx表示从旋翼轴到飞行器质心在螺旋桨平面上的距离,(xcg,ycg,zcg)是飞行器重心的坐标,(xi,yi,zi)是旋翼轴的坐标,μ是旋翼的轴向力矩系数(max=μt),表示推力t和轴向力矩max之间的线性关系;
14、对于固定翼飞行器,动力学模型的表达式如下:
15、
16、
17、
18、其中,q=0.5ρv2表示动压,ρ表示空气密度,v表示空速,s表示机翼面积,l表示机翼展长,ba表示机翼的平均气动弦长,α表示攻角,β表示滑移角,ωx,ωy,ωz表示角速度的分量,表示滚转力矩与滑移角β、副翼角度δa和角速度ωx之间的系数,表示偏航力矩与滑移角β、方向舵角度δr和角速度ωy之间的系数,mz0表示零攻角下的俯仰力矩系数,表示攻角α,升降舵角度δe和角速度ωz对俯仰力矩的系数。
19、优选的:所述步骤s2中多旋翼飞行器的pd控制器的表达式如下:
20、
21、
22、
23、其中,表示计算得到的滚转、俯仰和偏航力矩系数的控制值,表示控制器的比例和微分系数,γ是滚转角,ψ是偏航角,θ是俯仰角,ωx,ωy,ωz是飞行器当前的角速度分量,γd,ψd,θd表示多旋翼飞行器目标姿态角位置。
24、优选的:所述步骤s3采用分段pd控制器,根据飞行器不同飞行状态进行阶段划分,并通过最小二乘法计算每个阶段相应的pd参数。
25、优选的:所述步骤s3中基于最小二乘法回归策略的控制器表达式如下:
26、
27、
28、
29、i=1,...,n
30、其中,表示具有气动外形的倾转旋翼飞行器控制器的比例和微分系数,γerr=γd-γ,ψerr=ψd-ψ,θerr=θd-θ是具有气动外形的倾转旋翼飞行器的角位置误差。
31、优选的:所述步骤s4中控制分配的表达式如下:
32、
33、
34、
35、其中,是具有气动外形的倾转旋翼飞行器副翼控制器的比例和微分系数,是具有气动外形的倾转旋翼飞行器方向舵控制器的比例和微分系数,是具有气动外形的倾转旋翼飞行器升降舵控制器的比例和微分系数。
36、本发明相较于现有技术,其有益效果为:
37、本发明中所提出的“多旋翼-倾转旋翼-带有空气动力学外形”的建模方法自下而上、逐步完成,由于不需要直接进行复杂飞行器模型的建立,因而结构简单,易于构建,同时提出的基于最小二乘回归策略的控制器参数整定方法根据飞行器不同飞行状态实时分段设计相应的控制器参数,这样精细化的自适应实时优化方法结构简单,能够有效增强飞行器的整体稳定性和姿态控制精度,满足飞行器系统的性能要求。
技术特征:1.一种倾转旋翼飞行器的建模和姿态控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种倾转旋翼飞行器的建模和姿态控制方法,其特征在于:所述步骤s1中倾转旋翼飞行器绕各轴的转矩大小由推力、旋翼倾斜角度和旋翼轴向力矩系数决定,固定翼飞行器绕各轴的转矩大小由飞行器的气动外形决定。
3.根据权利要求2所述的一种倾转旋翼飞行器的建模和姿态控制方法,其特征在于:所述步骤s1中倾转旋翼飞行器的动力学模型的表达式如下:
4.根据权利要求3所述的一种倾转旋翼飞行器的建模和姿态控制方法,其特征在于:所述步骤s2中多旋翼飞行器的pd控制器的表达式如下:
5.根据权利要求4所述的一种倾转旋翼飞行器的建模和姿态控制方法,其特征在于:所述步骤s3采用分段pd控制器,根据飞行器不同飞行状态进行阶段划分,并通过最小二乘法计算每个阶段相应的pd参数。
6.根据权利要求5所述的一种倾转旋翼飞行器的建模和姿态控制方法,其特征在于:所述步骤s3中基于最小二乘法回归策略的控制器表达式如下:
7.根据权利要求6所述的一种倾转旋翼飞行器的建模和姿态控制方法,其特征在于:所述步骤s4中控制分配的表达式如下:
技术总结本发明涉及飞行器技术领域,一种倾转旋翼飞行器的建模和姿态控制方法,首先建立了一个“多旋翼‑倾转旋翼‑倾转旋翼与空气动力学外形”的动力学模型,然后通过设计质量和转动惯量相同的简单飞行器控制器来获取控制参数,再通过基于最小二乘法的回归策略在这些参数的基础上设计具有气动外形的倾转旋翼飞行器控制器参数;本发明以这样自下而上、逐步搭建的方式完成具有气动外形的倾转旋翼飞行器姿态控制,本发明所提出的控制器设计方法结构简单,不需要额外建立复杂飞行器的模型,同时能满足飞行器系统性能要求。技术研发人员:谭立国,唐士洋,田刚印,胡长青,熊永程,霍建文,施俊杰,王斌,郭鹏受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/200835.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表